進捗
資料更新45
AUTOSAR R22-11 マラソン
今週取り上げる資料
今週取り上げる資料はover view
Classic Platform Release Overview
文書番号/URLがない。追加した。
週報を書く経緯と内容
AUTOSAR Abstract Platform User Groupが、最初30人。
暮れに、消臭範囲を広げて40人。
年明けに再募集して、47人。
52人になるまで集める。
52人の根拠は、週報を、毎回、ひとりづつあてに書いていくと、52人で1年が終わる感じ。
週報を書くにあたって、特定の個人に向けて報告を書く形式にさせてください。
なお、この週報は、30点を目指しており、70点分の記載はありません。
3人が別々の方向で直交する30点の記述を持ち寄れば90点になるかもしれません。
百点満点の三十点を目指しなさい。
https://qiita.com/kaizen_nagoya/items/cc953b7a4c9368cc2a17
<この項は書きかけです。順次追記します。>
AUTOSAR
1. 制御のMBD(Model Based Design/Developmemt)
MATLAB/Simulink などの連続模型と、EnterPrise ArchitectなどのUML離散模型とから、系全体を自動生成する。
課題としては、連続系と離散系の連成と、それぞれの道具間の連携。
離散系では安全分析、実時間処理などの対応から、状態遷移(state)図(表)、時系列図(sequence chart)、刻時図(timing chart)が必須。
2. 制御を邪魔しない通信規約CANと、制御を邪魔せずCANを助けるOSEK/VDX OS/COM/NM連携自動生成
AUTOSARではOSを拡張し、COM、NMの一部を仕様変更し、OILではなくARXMLを採用することにした。
Adaptive PlatfomのPOSIX/Ethernetではあたりまえに実現していたRPCをCAN/OSEK/VDX OSで実現しようとしたのがClassic Platformであるとすれば、設計の方向性は全く同じ。
車載EthernetではSwitchingを基本とするためCAN同様の制御の邪魔をしない通信が可能になり、LinuxがOSEK/VDX OS 以上にゼロコピーを実現できれば大丈夫かも。
3. 物理的なECUを作成する前に仮想環境で模擬試験する。
ECUを製造する前に、アプリを作成し試験ができるようにする際に、2002年当時はCPUのシミュレータの作成が課題だった。下記で紹介するAthrillは、一つの解決事例。
4. 実時間処理設計のためにエンジンベンチ、モータベンチで、負荷試験、制御試験を実施し、短時間制御できるように固定小数点と表引きによる高速処理を実現する。
エンジンベンヂ、モータベンチからHILSによる実時間設計を確実にする。
ツールベンダの競争領域とみなされ、AUTOSARではあまり議論を深めていないかもしれない。
Adaptive Platformで実時間処理への対応から、Classic Platformと同じ理論的な取り組みで実現可能であり、ツール類の整備が進む可能性があるかも。
5. CAN/OSEK/VDX OSで、Linux/EthernetのようなRPCを実現し、リソースの再配置を容易にする。
AUTOSARはlinux ethernetでできていたrpcをCAN OSEK/vdx osで実現することが基本設計の一つ。
OEMとSupplierの利害が必ずしも一致していないかもしれない。
実時間処理では事実上使わない機能かもしれない。
通信速度、処理時間、処理空間の兼ね合い。
AUTOSAR Abstrct Platform
Specification of Abstract Platform, AUTOSAR 22-11, XP, No.947
https://qiita.com/kaizen_nagoya/items/7d6505a8e7fa001a028c
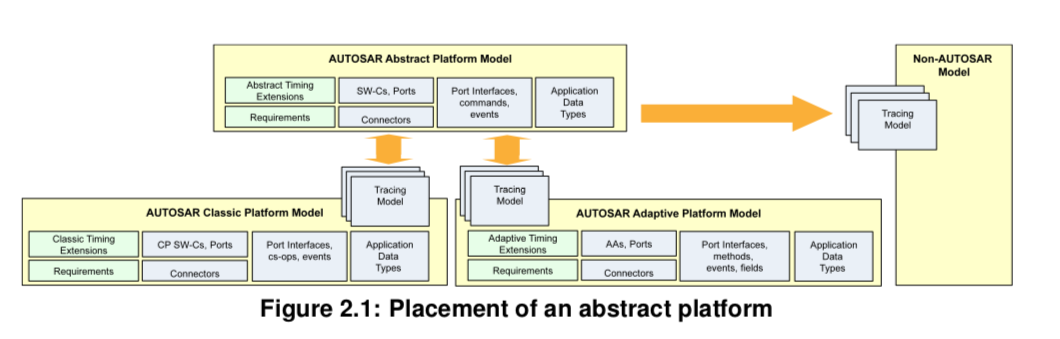
Abstract PlatformとAdaptive Platform、Classic Platformの間は、双方向なやりとりを可能にしようとしている。
Abstract PlatformからOSなし、その他のOSなどとの間は、一方通行を検討しようとしている。しかし、モデル定義を公開すれば、逆方向も可能な道具立は作絵師できるかもしれない。
AUTOSAR Abstract Platfromの考え方は、
2002年にAUTOSARが始まった頃の、上記1,2,3の考え方と基本的な方向性が同じ。
模型(model)を作り、模擬試験(simulation)して、自動生成する。
制御の基本的な手順である。
自動車という分野で実現するための一つの道筋のようで、
すべての制御模型の基本手順である。
抽象的な定義をうまく作り込めば、他の産業分野でも応用が可能な道具立ができることが鍵となるかもしれない。
20年前との違い
AUTOSARが始まった2002年ころと、現在の違いの視点をいくつか記録する。
Matlab/Simulink
MATLAB/Simulinkのソフトウェアライセンスは、製品寿命への対応よりも、
製品そのものの品質と、セキュリティ対応から、新しいソフト対応に傾斜しているかもしれない。
トヨタ自動車、MBDの更なる生産性向上を目指して、MATLABをR2021aへ移行
https://jp.mathworks.com/company/newsroom/toyota-shifts-to-matlab-r2021a-to-improve-productivity-model-based-design.html
C/C++
セキュリティ対応のため最新の国際規格を参照する方向に切り替わった。
gcc++
8086系cpuの最適化が進んだことと、色々なCPUのクロスコンパイラをチップベンダが協力し
ARM
AUTOSAR Adaptive Platform Demonstratorでは、Raspberry PI3, 4を使って作成している。量産でもARMの使用率は高くなっているらしい。
open source
adaptive platform dfmonstrator は,ほとんどopensourseからなっている、
Linux
AUTOSAR Adaptive Platformでは、POSEX PSE51という記述がある。
実際にはLinux などのPSE54を使った方が便利な場合はPSE54を使う。
http://www.opengroup.org/austin/papers/wp-apis.txt
| file/ process | single | multi |
|---|---|---|
| no | 51 | 53 |
| yes | 52 | 54 |
Note that one major change between IEEE Std 1003.13-1998 and
IEEE Std 1003.13-2003 is that PSE53 now requires a file system.
車載LinuxのcovesaなどAUTOSARの外でISOへの入力ができるかもしれない。
車載Ethernet
AUTOSARの外でIEEE、ISO.IECに入力している。
Athrill
ROS対応マイコンシミュレータ athrill 颯爽と登場!
https://qiita.com/kanetugu2018/items/81713a3431482eab0f52
箱庭
箱の中に,様々なモノをみんなの好みで配置して,いろいろ試せる!
https://toppers.github.io/hakoniwa/docs/concept/
AUTOWARE
AUTOWARE
https://www.autoware.org
AUTOWAREの講演をお聞きして、納得感があった。
ちょうど、Athrill, 箱庭のご講演をお聞きした時と同じ感想。
Abstract Platform上で記述した模型が、AUTOWARE上でも動作するとよい。
参考資料
A big wrapping cloth with the miniature garden
https://qiita.com/kaizen_nagoya/items/96411f20632e7f3ff73a
AUTOSAR 「完全に理解した」
https://qiita.com/kaizen_nagoya/items/51983798ad7902b33cb1
AUTOSAR R22-11 マラソン
https://qiita.com/kaizen_nagoya/items/988aa405a6fdd794fe53
1/1-1.7の1週間で64文書資料更新。
| 週 | 文書数 |
|---|---|
| 1 | 64 |
残課題はいっぱいあり、来週以降の報告で記載します。
参考資料
プログラマの「日報、週報、月報、年報」考。仮説(73)
https://qiita.com/kaizen_nagoya/items/97ad8ac9217c12c3bb69
日報、週報、月報、年報 考 2022
https://qiita.com/kaizen_nagoya/items/ae884b5667d3f4faf23c
<この項は書きかけです。順次追記します。>
This article is not completed. I will add some words and/or centences in order.
Este artículo no está completo. Agregaré algunas palabras en orden.
Qiita Calendar 2024
2024 参加・主催Calendarと投稿記事一覧 Qiita(248)
https://qiita.com/kaizen_nagoya/items/d80b8fbac2496df7827f
主催Calendar2024分析 Qiita(254)
https://qiita.com/kaizen_nagoya/items/15807336d583076f70bc
Calendar 統計
https://qiita.com/kaizen_nagoya/items/e315558dcea8ee3fe43e
LLM 関連 Calendar 2024
https://qiita.com/kaizen_nagoya/items/c36033cf66862d5496fa
Large Language Model Related Calendar
https://qiita.com/kaizen_nagoya/items/3beb0bc3fb71e3ae6d66
博士論文 Calendar 2024 を開催します。
https://qiita.com/kaizen_nagoya/items/51601357efbcaf1057d0
博士論文(0)関連記事一覧
https://qiita.com/kaizen_nagoya/items/8f223a760e607b705e78
自己記事一覧
Qiitaで逆リンクを表示しなくなったような気がする。時々、スマフォで表示するとあらわっることがあり、完全に削除したのではなさそう。
4月以降、せっせとリンクリストを作り、統計を取って確率を説明しようとしている。
2025年2月末を目標にしている。
一覧の一覧( The directory of directories of mine.) Qiita(100)
https://qiita.com/kaizen_nagoya/items/7eb0e006543886138f39
仮説(0)一覧(目標100現在40)
https://qiita.com/kaizen_nagoya/items/f000506fe1837b3590df
Qiita(0)Qiita関連記事一覧(自分)
https://qiita.com/kaizen_nagoya/items/58db5fbf036b28e9dfa6
Error一覧 error(0)
https://qiita.com/kaizen_nagoya/items/48b6cbc8d68eae2c42b8
C++ Support(0)
https://qiita.com/kaizen_nagoya/items/8720d26f762369a80514
Coding(0) Rules, C, Secure, MISRA and so on
https://qiita.com/kaizen_nagoya/items/400725644a8a0e90fbb0
Ethernet 記事一覧 Ethernet(0)
https://qiita.com/kaizen_nagoya/items/88d35e99f74aefc98794
Wireshark 一覧 wireshark(0)、Ethernet(48)
https://qiita.com/kaizen_nagoya/items/fbed841f61875c4731d0
線網(Wi-Fi)空中線(antenna)(0) 記事一覧(118/300目標)
https://qiita.com/kaizen_nagoya/items/5e5464ac2b24bd4cd001
なぜdockerで機械学習するか 書籍・ソース一覧作成中 (目標100)
https://qiita.com/kaizen_nagoya/items/ddd12477544bf5ba85e2
プログラムちょい替え(0)一覧:4件
https://qiita.com/kaizen_nagoya/items/296d87ef4bfd516bc394
言語処理100本ノックをdockerで。python覚えるのに最適。:10+12
https://qiita.com/kaizen_nagoya/items/7e7eb7c543e0c18438c4
Python(0)記事をまとめたい。
https://qiita.com/kaizen_nagoya/items/088c57d70ab6904ebb53
安全(0)安全工学シンポジウムに向けて: 21
https://qiita.com/kaizen_nagoya/items/c5d78f3def8195cb2409
プログラマによる、プログラマのための、統計(0)と確率のプログラミングとその後
https://qiita.com/kaizen_nagoya/items/6e9897eb641268766909
転職(0)一覧
https://qiita.com/kaizen_nagoya/items/f77520d378d33451d6fe
技術士(0)一覧
https://qiita.com/kaizen_nagoya/items/ce4ccf4eb9c5600b89ea
Reserchmap(0) 一覧
https://qiita.com/kaizen_nagoya/items/506c79e562f406c4257e
物理記事 上位100
https://qiita.com/kaizen_nagoya/items/66e90fe31fbe3facc6ff
量子(0) 計算機, 量子力学
https://qiita.com/kaizen_nagoya/items/1cd954cb0eed92879fd4
数学関連記事100
https://qiita.com/kaizen_nagoya/items/d8dadb49a6397e854c6d
coq(0) 一覧
https://qiita.com/kaizen_nagoya/items/d22f9995cf2173bc3b13
統計(0)一覧
https://qiita.com/kaizen_nagoya/items/80d3b221807e53e88aba
図(0) state, sequence and timing. UML and お絵描き
https://qiita.com/kaizen_nagoya/items/60440a882146aeee9e8f
色(0) 記事100書く切り口
https://qiita.com/kaizen_nagoya/items/22331c0335ed34326b9b
品質一覧
https://qiita.com/kaizen_nagoya/items/2b99b8e9db6d94b2e971
言語・文学記事 100
https://qiita.com/kaizen_nagoya/items/42d58d5ef7fb53c407d6
医工連携関連記事一覧
https://qiita.com/kaizen_nagoya/items/6ab51c12ba51bc260a82
水の資料集(0) 方針と成果
https://qiita.com/kaizen_nagoya/items/f5dbb30087ea732b52aa
自動車 記事 100
https://qiita.com/kaizen_nagoya/items/f7f0b9ab36569ad409c5
通信記事100
https://qiita.com/kaizen_nagoya/items/1d67de5e1cd207b05ef7
日本語(0)一欄
https://qiita.com/kaizen_nagoya/items/7498dcfa3a9ba7fd1e68
英語(0) 一覧
https://qiita.com/kaizen_nagoya/items/680e3f5cbf9430486c7d
音楽 一覧(0)
https://qiita.com/kaizen_nagoya/items/b6e5f42bbfe3bbe40f5d
「@kazuo_reve 新人の方によく展開している有益な情報」確認一覧
https://qiita.com/kaizen_nagoya/items/b9380888d1e5a042646b
鉄道(0)鉄道のシステム考察はてっちゃんがてつだってくれる
https://qiita.com/kaizen_nagoya/items/faa4ea03d91d901a618a
OSEK OS設計の基礎 OSEK(100)
https://qiita.com/kaizen_nagoya/items/7528a22a14242d2d58a3
coding (101) 一覧を作成し始めた。omake:最近のQiitaで表示しない5つの事象
https://qiita.com/kaizen_nagoya/items/20667f09f19598aedb68
官公庁・学校・公的団体(NPOを含む)システムの課題、官(0)
https://qiita.com/kaizen_nagoya/items/04ee6eaf7ec13d3af4c3
「はじめての」シリーズ ベクタージャパン
https://qiita.com/kaizen_nagoya/items/2e41634f6e21a3cf74eb
AUTOSAR(0)Qiita記事一覧, OSEK(75)
https://qiita.com/kaizen_nagoya/items/89c07961b59a8754c869
プログラマが知っていると良い「公序良俗」
https://qiita.com/kaizen_nagoya/items/9fe7c0dfac2fbd77a945
LaTeX(0) 一覧
https://qiita.com/kaizen_nagoya/items/e3f7dafacab58c499792
自動制御、制御工学一覧(0)
https://qiita.com/kaizen_nagoya/items/7767a4e19a6ae1479e6b
Rust(0) 一覧
https://qiita.com/kaizen_nagoya/items/5e8bb080ba6ca0281927
関連資料
' @kazuo_reve 私が効果を確認した「小川メソッド」
https://qiita.com/kazuo_reve/items/a3ea1d9171deeccc04da
' @kazuo_reve 新人の方によく展開している有益な情報
https://qiita.com/kazuo_reve/items/d1a3f0ee48e24bba38f1
' @kazuo_reve Vモデルについて勘違いしていたと思ったこと
https://qiita.com/kazuo_reve/items/46fddb094563bd9b2e1e
Engineering Festa 2024前に必読記事一覧
programの本質は計画だ。programは設計だ。
https://qiita.com/kaizen_nagoya/items/c8545a769c246a458c27
登壇直後版 色使い(JIS安全色) Qiita Engineer Festa 2023〜私しか得しないニッチな技術でLT〜 スライド編 0.15
https://qiita.com/kaizen_nagoya/items/f0d3070d839f4f735b2b
プログラマが知っていると良い「公序良俗」
https://qiita.com/kaizen_nagoya/items/9fe7c0dfac2fbd77a945
逆も真:社会人が最初に確かめるとよいこと。OSEK(69)、Ethernet(59)
https://qiita.com/kaizen_nagoya/items/39afe4a728a31b903ddc
統計の嘘。仮説(127)
https://qiita.com/kaizen_nagoya/items/63b48ecf258a3471c51b
自分の言葉だけで論理展開できるのが天才なら、文章の引用だけで論理展開できるのが秀才だ。仮説(136)
https://qiita.com/kaizen_nagoya/items/97cf07b9e24f860624dd
参考文献駆動執筆(references driven writing)・デンソークリエイト編
https://qiita.com/kaizen_nagoya/items/b27b3f58b8bf265a5cd1
「何を」よりも「誰を」。10年後のために今見習いたい人たち
https://qiita.com/kaizen_nagoya/items/8045978b16eb49d572b2
Qiitaの記事に3段階または5段階で到達するための方法
https://qiita.com/kaizen_nagoya/items/6e9298296852325adc5e
出力(output)と呼ばないで。これは状態(state)です。
https://qiita.com/kaizen_nagoya/items/80b8b5913b2748867840
coding (101) 一覧を作成し始めた。omake:最近のQiitaで表示しない5つの事象
https://qiita.com/kaizen_nagoya/items/20667f09f19598aedb68
あなたは「勘違いまとめ」から、勘違いだと言っていることが勘違いだといくつ見つけられますか。人間の間違い(human error(125))の種類と対策
https://qiita.com/kaizen_nagoya/items/ae391b77fffb098b8fb4
プログラマの「プログラムが書ける」思い込みは強みだ。3つの理由。仮説(168)統計と確率(17) , OSEK(79)
https://qiita.com/kaizen_nagoya/items/bc5dd86e414de402ec29
出力(output)と呼ばないで。これは状態(state)です。
https://qiita.com/kaizen_nagoya/items/80b8b5913b2748867840
これからの情報伝達手段の在り方について考えてみよう。炎上と便乗。
https://qiita.com/kaizen_nagoya/items/71a09077ac195214f0db
ISO/IEC JTC1 SC7 Software and System Engineering
https://qiita.com/kaizen_nagoya/items/48b43f0f6976a078d907
アクセシビリティの知見を発信しよう!(再び)
https://qiita.com/kaizen_nagoya/items/03457eb9ee74105ee618
統計論及確率論輪講(再び)
https://qiita.com/kaizen_nagoya/items/590874ccfca988e85ea3
読者の心をグッと惹き寄せる7つの魔法
https://qiita.com/kaizen_nagoya/items/b1b5e89bd5c0a211d862
「@kazuo_reve 新人の方によく展開している有益な情報」確認一覧
https://qiita.com/kaizen_nagoya/items/b9380888d1e5a042646b
ソースコードで議論しよう。日本語で議論するの止めましょう(あるプログラミング技術の議論報告)
https://qiita.com/kaizen_nagoya/items/8b9811c80f3338c6c0b0
脳内コンパイラの3つの危険
https://qiita.com/kaizen_nagoya/items/7025cf2d7bd9f276e382
心理学の本を読むよりはコンパイラ書いた方がよくね。仮説(34)
https://qiita.com/kaizen_nagoya/items/fa715732cc148e48880e
NASAを超えるつもりがあれば読んでください。
https://qiita.com/kaizen_nagoya/items/e81669f9cb53109157f6
データサイエンティストの気づき!「勉強して仕事に役立てない人。大嫌い!!」『それ自分かも?』ってなった!!!
https://qiita.com/kaizen_nagoya/items/d85830d58d8dd7f71d07
「ぼくの好きな先生」「人がやらないことをやれ」プログラマになるまで。仮説(37)
https://qiita.com/kaizen_nagoya/items/53e4bded9fe5f724b3c4
なぜ経済学徒を辞め、計算機屋になったか(経済学部入学前・入学後・卒業後対応) 転職(1)
https://qiita.com/kaizen_nagoya/items/06335a1d24c099733f64
プログラミング言語教育のXYZ。 仮説(52)
https://qiita.com/kaizen_nagoya/items/1950c5810fb5c0b07be4
【24卒向け】9ヶ月後に年収1000万円を目指す。二つの関門と三つの道。
https://qiita.com/kaizen_nagoya/items/fb5bff147193f726ad25
「【25卒向け】Qiita Career Meetup for STUDENT」予習の勧め
https://qiita.com/kaizen_nagoya/items/00eadb8a6e738cb6336f
大学入試不合格でも筆記試験のない大学に入って卒業できる。卒業しなくても博士になれる。
https://qiita.com/kaizen_nagoya/items/74adec99f396d64b5fd5
全世界の不登校の子供たち「博士論文」を書こう。世界子供博士論文遠隔実践中心 安全(99)
https://qiita.com/kaizen_nagoya/items/912d69032c012bcc84f2
小川メソッド 覚え(書きかけ)
https://qiita.com/kaizen_nagoya/items/3593d72eca551742df68
DoCAP(ドゥーキャップ)って何ですか?
https://qiita.com/kaizen_nagoya/items/47e0e6509ab792c43327
views 20,000越え自己記事一覧
https://qiita.com/kaizen_nagoya/items/58e8bd6450957cdecd81
Views1万越え、もうすぐ1万記事一覧 最近いいねをいただいた213記事
https://qiita.com/kaizen_nagoya/items/d2b805717a92459ce853
amazon 殿堂入りNo1レビュアになるまで。仮説(102)
https://qiita.com/kaizen_nagoya/items/83259d18921ce75a91f4
100以上いいねをいただいた記事16選
https://qiita.com/kaizen_nagoya/items/f8d958d9084ffbd15d2a
小川清最終講義、最終講義(再)計画, Ethernet(100) 英語(100) 安全(100)
https://qiita.com/kaizen_nagoya/items/e2df642e3951e35e6a53
<この記事は個人の過去の経験に基づく個人の感想です。現在所属する組織、業務とは関係がありません。>
This article is an individual impression based on my individual experience. It has nothing to do with the organization or business to which I currently belong.
Este artículo es una impresión personal basada en mi experiencia personal. No tiene nada que ver con la organización o empresa a la que pertenezco actualmente.
文書履歴(document history)
ver. 0.01 初稿 20230108
最後までおよみいただきありがとうございました。
いいね 💚、フォローをお願いします。
Thank you very much for reading to the last sentence.
Please press the like icon 💚 and follow me for your happy life.
Muchas gracias por leer hasta la última oración.
Por favor, haz clic en el ícono Me gusta 💚 y sígueme para tener una vida feliz.