about EspressoFrame
EspressoFrameはオープンソースハードウェアの室内用AGVです。設計はすべて公開していて、3Dプリンターレーザーカッターで作成した部品と市販品を組み合わせて作成できます。
特徴
主要諸元
| 項目 | 値 |
|---|---|
| 重量 | 10kg |
| 寸法 | 510mm(全長)、388mm(全幅)、939mm(全高) |
| 移動機構 | 差動2輪 (直径144mm 間隔356mm) |
| 認識カメラ | CMS-V43BK-3 |
| 深度カメラ | RealSense D435、パンチルト駆動 |
| 障害物センサー | 2D Lidar(前方 LD19)、超音波センサー(後方)、バンパー |
| UI | AndroidTablet、ステータスLED、ブザー |
| 処理PC | Intel NUC |
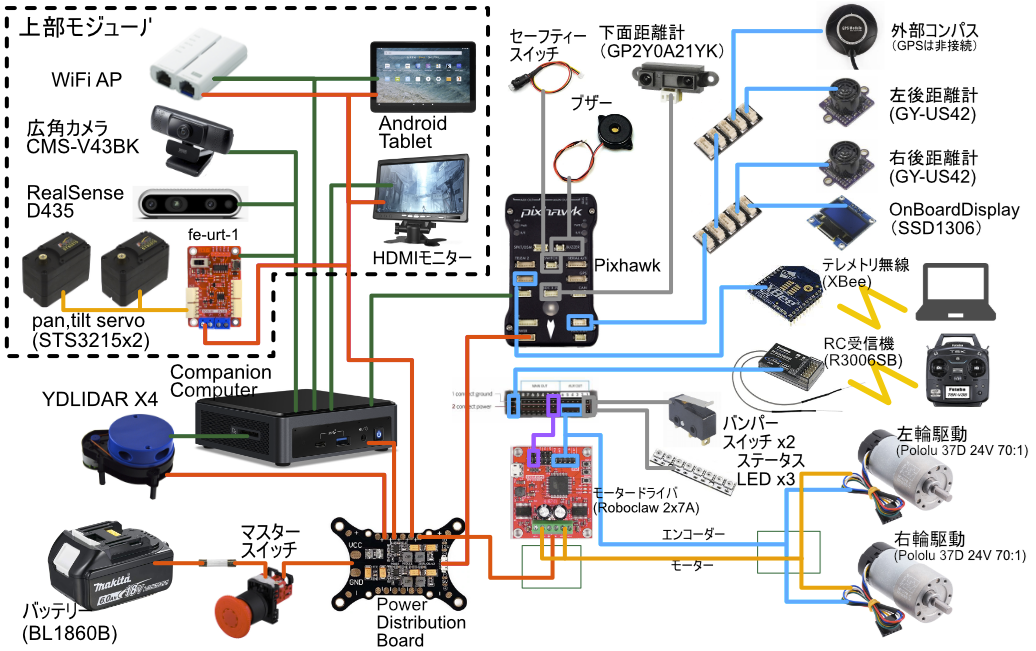
電装系
ハードウェアセットアップ
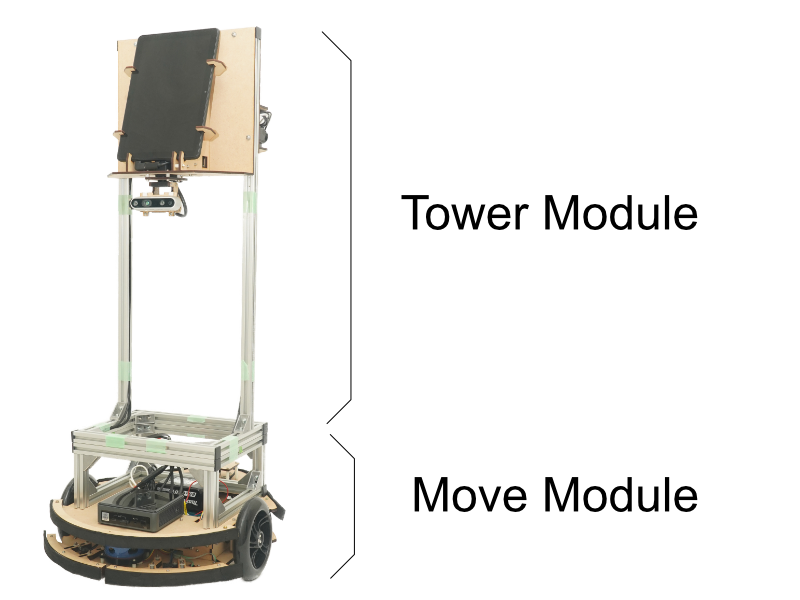
EspressoFrame全体は移動モジュールとタワーモジュールの2つの部分から構成されます。
Rover-01 スペックの設計をする
ロボットのサイズを決めるために必要な事項を検討します。
Rover-02 EspressoFrameの紹介、主要部品の選定、必須パーツリスト
今回製作するAGVである「EspressoFrame」の紹介と、この先で必要な購入品の一覧を乗せます。
移動モジュール
Rover-15 EspressoFrameの電装品(移動部)の用意
移動部で必要な電装品や制作が必要なケーブル・基板を紹介します。
Rover-03 MissionPlannerでardupilotと接続・アップデートする
PixhawkにファームウェアであるArdupilotを書き込みます。
Rover-04 ArdupilotにXBeeで接続する
XBeeを使って無線でPC-Pixhawkを接続します。
Rover-05 ArdupilotでIMU、地磁気センサーの初期設定をする
IMU、地磁気センサーの設定をします。
Rover-06 Ardupirotでプロポの初期設定をする
プロポの接続をします。
Rover-07 Ardupirotで距離センサーの設定をする
外付けデバイス系の設定します。
Rover-08 Roboclawの設定をする
モーター周りの配線をして、Roboclawでモーターを駆動します。
Rover-09 Ardupirotで駆動系の設定をする
電装品の実装・電源の接続・モータードライバの設定の後に、MANUALモードでのモーター駆動をします。
Rover-10 ArduRoverでバンパースイッチ、外付けステータスLEDの設定をする
バンパースイッチと外付けステータスLEDの設定をします。
Rover-11 EspressoFrameの筐体(移動部)を組み立てる
筐体を組み立てて走行可能な状態にします。
Rover-13 Ardupirotで自己位置・速度制御の設定をする
自己位置の設定と、ACROモードで移動できるように設定します。
タワーモジュール
Feetechサーボを動かす
STS3215のサーボ軸の駆動とID設定をします。
Rover-12 EspressoFrameの筐体(タワー部)を組み立てる
機体上部のUI部を組み立てます。
ソフトウェアセットアップ
システム系
Rover-14 ロボット用のNUCの事前設定をする
メインコンピューターであるNUCをロボット用に自動起動するように設定します。
ROS系
ROS2-11 FeetechServo(STS3215)を動かす
ROSからシリアル方式のサーボモーターを動かします。
ROS2-12 ydlidarX4を使う
YDLIDAR X4をROS2につなげて使用します。
ROS2-13 Ardupilotとmavrosで通信する
mavrosを使ってardupilotとROSを接続します。
ROS2-14 mavrosのpluginsを作成する
mavrosのpluginの記述方法を解説します。
ROS2-15 RealsenseD435を使う
RealsenseをROS2に接続して観測データを可視化します。
Rover-17 実機をROS2で動かす
ドライバーとサンプルアプリを起動して、実機を動かします。
Rover-16 シミュレーション環境を動かす
EspressoFrameの2種類のシミュレーション環境を動かします。