環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 22.04 |
| ROS2 | Humble |
概要
LIDARはロボットでよく使われるセンサーの1つで、距離が高精度に分かるために特に移動ロボットで重宝されます。しっかりしたものはWebカメラなどに比べると高価でしたが、最近中国製の安価な物が発売されています。今回は1万円台のYDLIDAR X4を使ってみます。

YDLIDARのwebサイトより
X4の購入
switch scienceで16,000円ほどで買えます。
最近はAmazonでも購入できます。Aliexpressでも少し安く購入できます。
梱包・内容物
内容物は以下です。
- YDLIDAR本体
- USB変換基板(+ケーブル)
- 予備モーターベルト
- USBケーブル
- 固定用ねじ(M2.3)x5
- 合格証

YDLIDAR本体には6ピンのシリアルインターフェイスしかありません。変換基板経由でUSBアクセスできます。
接続&udev追加
変換基板にはUSB microBコネクタがついていますが、片方は電力専用です。X4の消費電力が1ポートで出せる電力ギリギリの様で、接続する機器やUSBハブの有無によってモーター始動時に電源が落ちることがあります。
セルフパワーのUSBハブを使うなり、追加の電源を電力専用のUSBにつなぎましょう。
UbuntuPCにUSB接続が出来ると/dev/ttyUSB0として見えます。このままでも使えますが、別のデバイスとの兼ね合いで名前が変わってしまうので、udevにルールを追加します。以下のファイルを作成します。
KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60", MODE:="0666", GROUP:="dialout", SYMLINK+="ydlidar"
SiliconLabのCP210xをYdlidarX4を区別する手掛かりにしています。これでYdLidarX4をつなぐと/dev/ydlidarと見えます。
ROSと接続(on Ubuntu)
YdliderSDKのインストール
ydlidarX4のドライバーノードをビルドするには、ライブラリであるYdlidarSDKのビルドとインストールが必要です。
以下のコマンドを実行してください。/usr/local以下にファイルが置かれます。
cd /tmp
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd YDLidar-SDK/
cmake -B build
sudo cmake --install build
ros2driverの準備
公式のROS2のROSノードがあります。ただし最新のHumbleに対応していなく手直しが必要です。
masterブランチはまだROS2 Humbleに対応していなく、'humble'ブランチにcheckoutが必要です
(2023年8月に本家レポジトリでhumbleブランチが追加されました)。
-
YDLIDAR本家リポジトリ
git clone git@github.com:YDLIDAR/ydlidar_ros2_driver.git -b humbleでブランチをcloneできます。
起動の準備
#!/usr/bin/python3
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
def generate_launch_description():
return LaunchDescription([
Node(package='ydlidar_ros2_driver',
executable='ydlidar_ros2_driver_node',
namespace='/device/front_laser',
output='screen',
emulate_tty=True,
parameters=[os.path.join(
get_package_share_directory('ydlidar_ros2_driver'), 'params', 'X4_for_srs.yaml')],
)
])
/**:
ros__parameters:
port: /dev/ydlidar
frame_id: front_laser_link
ignore_array: ""
baudrate: 128000
lidar_type: 1
device_type: 0
sample_rate: 5
abnormal_check_count: 4
fixed_resolution: true
reversion: true
inverted: true
auto_reconnect: true
isSingleChannel: false
intensity: false
support_motor_dtr: true
angle_max: 180.0
angle_min: -180.0
range_max: 12.0
range_min: 0.1
frequency: 10.0
invalid_range_is_inf: false
intensity_bit: 8
paramファイルでは以下のパラメーターを設定します。
| param名 | 説明 | X4での設定値 |
|---|---|---|
| frame_id | 出力するscanトピックのframe_idの値 | (ユーザー指定値) |
| ignore_array | 特定の範囲のデータを無視する | ""(空白) |
| baudrate | YdlidarX4とのUARTのbaudrate | 128000 |
| lidar_type | 測距方式 | 1(TYPE_TRIANGLE) |
| device_type | デバイスとの通信方式 | 0(YDLIDAR_TYPE_SERIAL) |
| sample_rate | x1000した値が1秒間に測距する点数(X4は5固定) | 5 |
| abnormal_check_count | エラーチェックの閾値 | 4 |
| fixed_resolution | 1scanでのデータ数が一定になるように補正するか | true |
| reversion | 出力をZ軸で180deg回転、falseだとmotorがある側がX軸になる | true |
| inverted | 出力がX軸で180deg回転、LIDARを上下逆に取り付けた時に変更 | true |
| auto_reconnect | 接続断で自動接続するか | true |
| isSingleChannel | 通信プロトコルに関わる値? | false |
| intensity | intensity出力を使用するか(X4はintensity非対応) | false |
| support_motor_dtr | DTRをモーター制御で使用するか | true |
| angle_max | 有効な角度範囲(これを超えた値はinvalid_range_is_infで決まる値に上書きされる) | 180 |
| angle_min | 有効な角度範囲(々) | -180 |
| range_max | 有効な距離範囲(々) | 12.0 |
| angle_min | 有効な距離範囲(々) | 0.1 |
| frequency | 測距デバイスの回転速度(X4では未サポート) | 10 |
| invalid_range_is_inf | 無効な測距値の値の指定 false:0, true:inf | true |
ビルド&実行
source /opt/ros/humble/setup.bash
cd ros2_ws
colcon build
ros2 launch ydlidar_ros2_driver X4_for_srs.launch.py
- コマンドを打つとYDLIDARが回転を始めます。
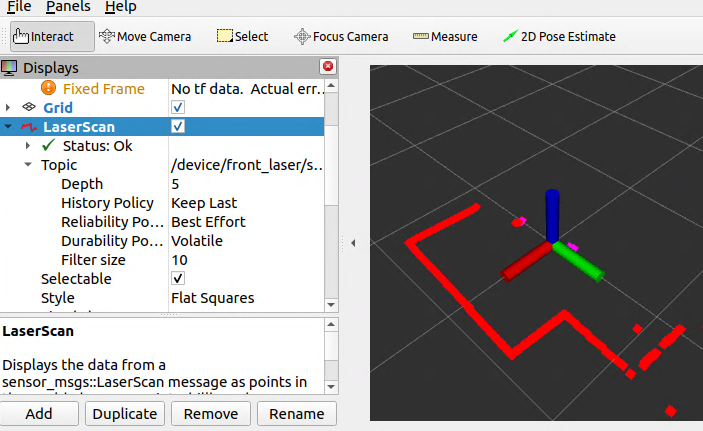
/device/ydlidar/scanトピックで情報を見ることができます。 - Rviz2でも「LaserScan」のdisplayプラグインで観測情報を見ることが出来ます。Publisher側でQoSがBestEffortに設定されているため、Rviz側でも「Topic」の「Reliability Policy」を「Best Effort」に設定する必要があります。
参考
$99と$400のLIDAR(360度レーザー距離測定機)を動かしてみた