環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| OS | Windows10 |
| MissionPlanner | v1.3.80 |
| 項目 | 値 |
|---|---|
| Board | Pixhawk(v2.4.8) |
| Ardupilot | Rover V4.2.3 |
概要
ardupilotの初期設定の内、センサーの設定やキャリブレーションを行います。
予備知識
IMUのキャリブレーション
Pixhawk本体には加速度センサー、各速度センサーが内蔵されています。これらのセンサーには固有の誤差があり、それを測定して打ち消す作業がキャリブレーションです。
Ardupilotdでは複数の指定の姿勢の時の加速度センサーの値を取得して、誤差を打ち消すパラメーターを取得します。
各速度センサーにも誤差がありますが、これはEKFの処理の中で推定して打ち消しています。
地磁気センサー
Pixhawk本体にも地磁気センサー(IST8310)が内蔵しておりこれを使用することも可能です。しかし今回のRoverのようにPixhawk付近にモーターを配置する場合は地磁気センサーの値が不正確になります。このために今回は外付けの地磁気センサー(HMC5883)を使います。
地磁気センサーのキャリブレーションではセンサー自体や機体自体が持っている地場を推定します。そのために地磁気センサーのキャリブレーションは機体を組み替えたりした場合は再実行する必要があります。
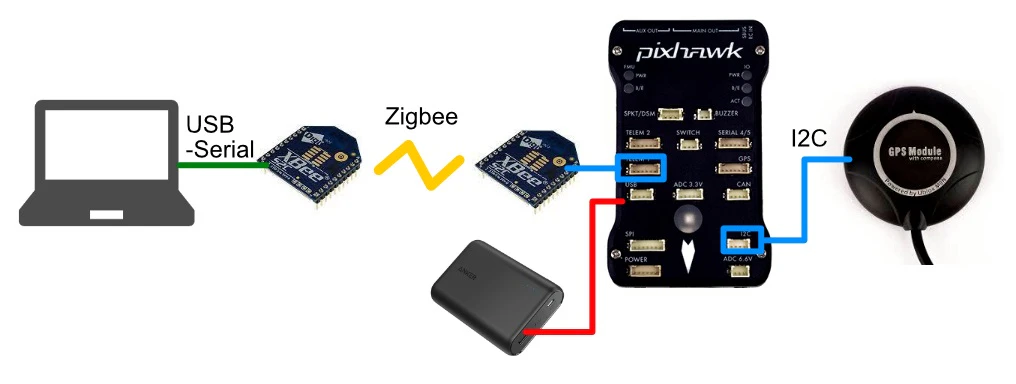
GPSモジュールの接続
Pixhawk用のGPSモジュールとして、GPS受信機(M8N)と地磁気センサーが一体化したものがよく市販されています。
ArdupilotのEKFの動作として、GPS情報を無効にしてもGPS情報をどこかしらで使ってしまう問題があります。そのため今回はGPS受信機はPixhawkに接続せず、地磁気センサーのみを接続します。
前提条件
以下の機器が必要です。
- WindowsPC
- MissionPlanner導入済み
- Pixhawk
- Ardupirot(Rover)インストール済み
- WindowsPCからMissionPlannerでアクセス可能であること(XBee推奨)
- 電源供給が出来ること(モバイルバッテリー推奨)
- 外付け地磁気センサー(GPSモジュールに内蔵)
手順
加速度センサーのキャリブレーション
- WindowsPCでMissionPlannerを起動して、Ardupilotを接続する。
*「初期設定」->「必須ハードウェア」->「Accel Calibration」を押して、加速度センサーのキャリブレーション画面を開く。
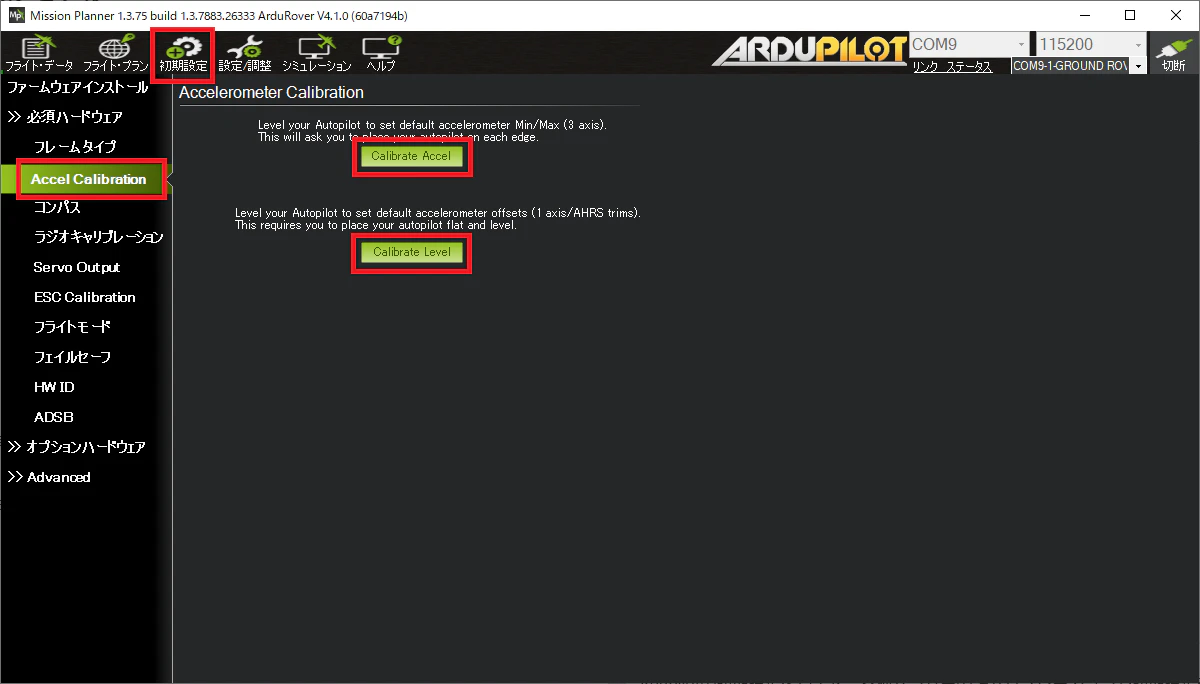
- 「Callibrate Accel」を押す。
- キャリブレーション中はPixhawkのLEDが赤青黄色の順で点滅する。
- 最初は画面にPixhawkが水平になるよう置くという指示が出る。その方向に置いたら「完了したらクリック」ボタンを押す。
- 残りの5方向も同様に行う。
- 「Callibrate Level」を押します。pixhawkを水平にしたらもう一度ボタンを押す。
- この時には出来る限り精密に水平をとること。
- 上記の2つを行うと「Simple Accel Cal」という項目が出てくるのでこれも同様に実行する。
コンパスセンサーの接続
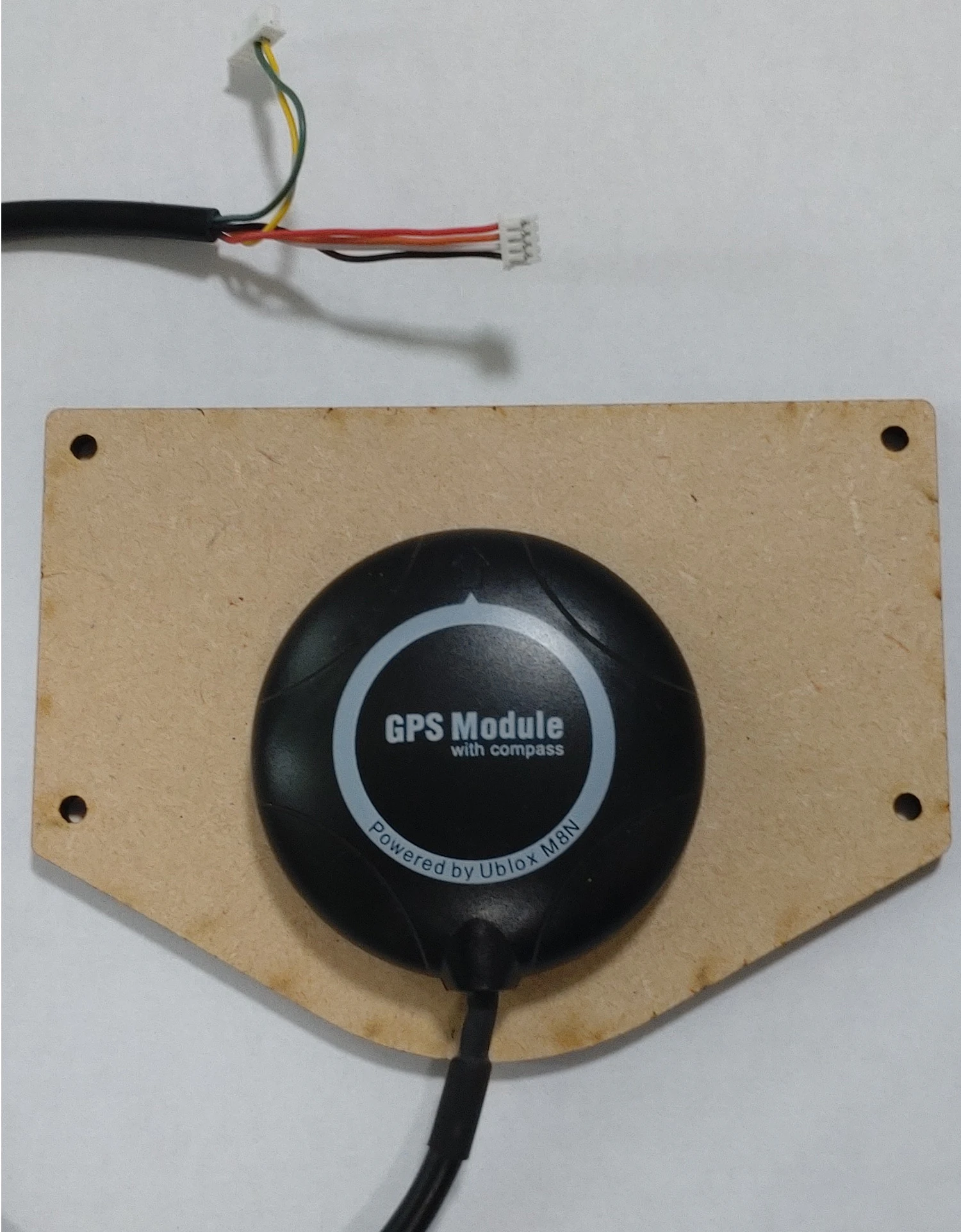
- GPSモジュールの出力のピンの内I2C関連の物が以下のような接続になるようにハウジングに付け替える。
- このコネクタをPixhawkのI2Cのポートに刺す。
| モジュール機能 | 色 | PicoBlade PIN# | |
|---|---|---|---|
| VCC | 赤 | 1 | |
| SCL | 橙 | 2 | |
| SDA | 白 | 3 | |
| GND | 黒 | 4 | |
| TXD | 黄 | NC | |
| RXD | 緑 | NC |
地磁気センサーの設定・キャリブレーション
- WindowsPCでMissionPlannerを起動して、Ardupilotを接続する。
- 「初期設定」->「コンパス」を押して地磁気センサーのキャリブレーションページを開きます。
- 「Compass Priority」の画面で、接続した外付け地磁気センサの表示があることを確認する。
- Externalにチェックが入っているのが外付けの地磁気センサーを示す。
- 使用する地磁気センサーの設定をする
- 「Use Compass 1」のチェックを外す。
- 「Use Compass 2」のチェックをつける(デフォルトのまま)。
- 「Use Compass 3」のチェックを外す。
- キャリブレーションを実行する。
- 「Onboard Mag Calibration」の「Start」を押す。
- Pixhawkと地磁気センサーを固定して、このセットを色々な姿勢でで回転する。
- ウィンドウ上の「Mag 2」の右のバーが右端に到達するまで続ける。
- 終了後は再起動を求められるのでPixhawkの電源を再投入する。

キャリブレーション完了の確認
- Pixhawkの電源を切り、再起動する。
- しばらくたつと、ステータスLEDが黄色から青に変化することを確認する。