環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 22.04 |
| ROS2 | Humble |
概要
ここまでEspressoFrameの実機の作り方を説明してきましたが、ここではSW開発用のシミュレーション環境の説明をします。
前提知識
シミュレーション
ここでは実機と同様にsample_appを動かして機体やパンチルトを移動させることを目標とします。
JoyPad
実機ではFutabaのT6Kのプロポを使って機体を動かしましたが、実機ではJoyPadを使います。ただし種類によってデフォルトのキーの割り当てが違ったりしてなかなか面倒です。
今回は「ロジクール ゲームパッド F310」 を用意してください。

gazebo
Gazeboシミュレーション
今回使うソースコードはespresso_frame_gazeboパッケージにあります。
git@github.com:project-srs/espresso_frame_gazebo.git
でコードを取得してください。
主なソースコード
espresso_frame_gazebo_launch/launch/gazebo.launch.py
"""Launch Gazebo server and client with command line arguments."""
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from ament_index_python.packages import get_package_share_directory, get_package_share_path
from launch_ros.actions import Node, SetParameter
from launch_ros.parameter_descriptions import ParameterValue
from launch.conditions import IfCondition
from launch.substitutions import Command
def generate_launch_description():
return LaunchDescription(
[
DeclareLaunchArgument(
name="world", default_value="cafe.world", description="world file name"
),
DeclareLaunchArgument(
'sample_app', default_value='false'
),
SetParameter(name="use_sim_time", value=True),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[
get_package_share_directory("gazebo_ros"),
"/launch/gzserver.launch.py",
]
),
launch_arguments={
"world": LaunchConfiguration("world"),
"verbose": "true",
}.items(),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[
get_package_share_directory("gazebo_ros"),
"/launch/gzclient.launch.py",
]
),
launch_arguments={"verbose": "true"}.items(),
),
Node(
package="joy",
executable="joy_node",
remappings=[("joy", "/device/mavros/rc_joy/joy")],
output="screen",
),
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': ParameterValue(Command(['xacro ', str(get_package_share_path('espresso_frame_gazebo_launch')) + '/urdf/all.urdf']))}],
),
Node(
package="espresso_frame_gazebo_launch",
executable="sample_app.py",
output="screen",
namespace="/app",
condition=IfCondition(LaunchConfiguration('sample_app')),
),
]
)
SetParameter(name="use_sim_time", value=True)はlaunch内のノードすべてにパラメーターを適用するコマンドです。gazeboの出すclock(起動時0から始まる)に合わせて全ノードが動きます。
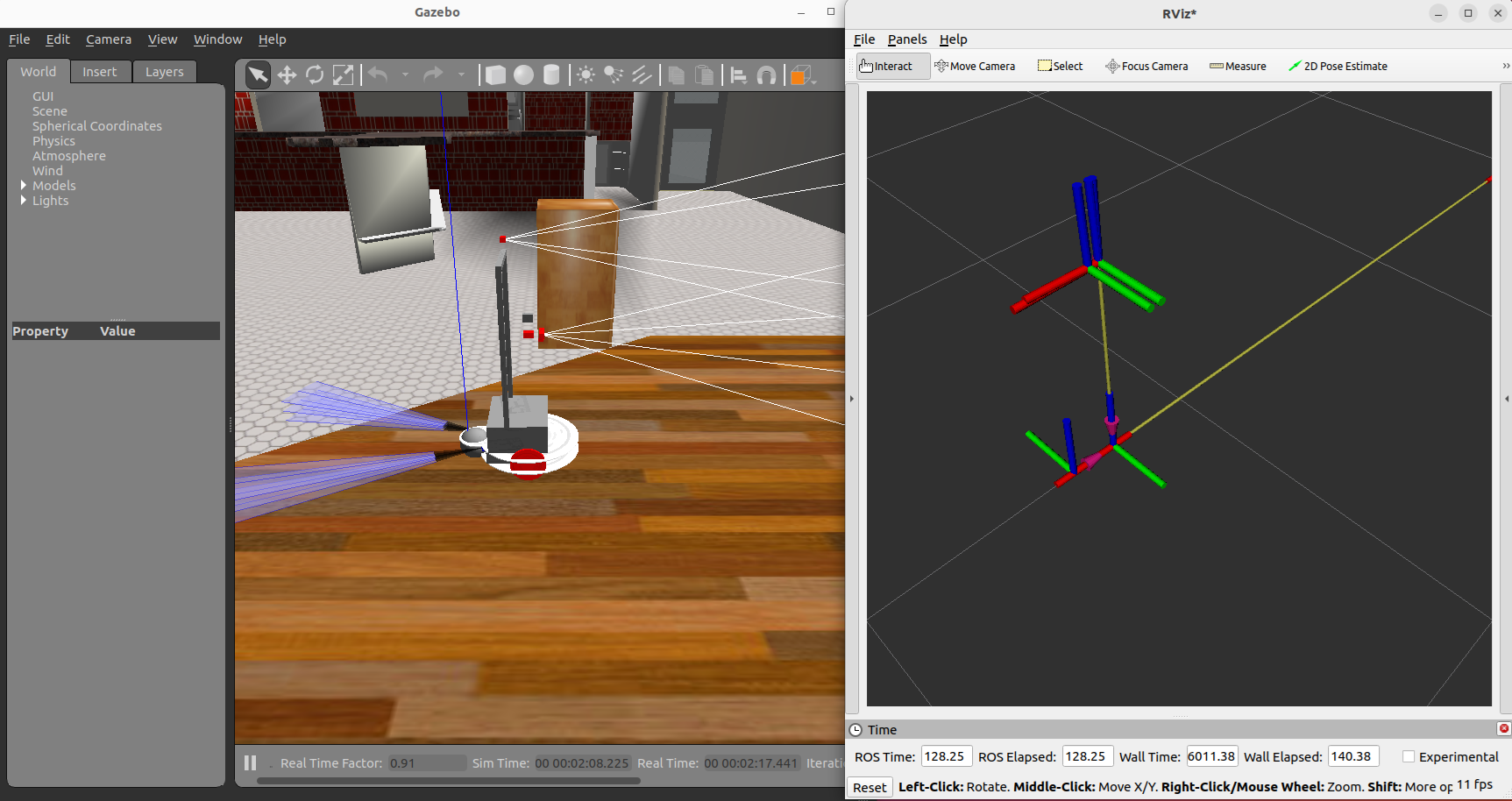
実行
1つ目のターミナル
ros2 launch espresso_frame_gazebo_launch gazebo.launch.py sample_app:=true
2つ目のターミナル
rviz2 --ros-args -p use_sim_time:=true
rvizではtfの表示とglobal frameをodomに変更しています。
F310のAボタンを押すとarm指令を出して移動可能になり、右スティックで移動、左スティックでPanTiltが動きます。
Simpleシミュレーション
主なソースコード
espresso_frame_gazebo_launch/launch/simple.launch.py
from ament_index_python.packages import get_package_share_directory, get_package_share_path
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
from launch.substitutions import Command
from launch.conditions import IfCondition
from launch_ros.parameter_descriptions import ParameterValue
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription(
[
DeclareLaunchArgument(
'sample_app', default_value='false'
),
Node(
package="espresso_frame_simple_simulator",
executable="dummy_move",
namespace="/device",
output="screen",
),
Node(
package="espresso_frame_simple_simulator",
executable="dummy_turret",
namespace="/device",
output="screen",
),
Node(
package="joy",
executable="joy_node",
remappings=[("joy", "/device/mavros/rc_joy/joy")],
output="screen",
),
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': ParameterValue(Command(['xacro ', str(get_package_share_path('espresso_frame_gazebo_launch')) + '/urdf/all.urdf']))}],
),
Node(
package="espresso_frame_gazebo_launch",
executable="sample_app.py",
output="screen",
namespace="/app",
condition=IfCondition(LaunchConfiguration('sample_app')),
),
]
)
ビルド&実行
1つ目のターミナル
ros2 launch espresso_frame_gazebo_launch simple.launch.py sample_app:=true
2つ目のターミナル
rviz2
gazeboはないのでrviz画面だけです。gazeboと同様にjoyで操作が出来ます。
