DJI Tello等ドローンの自律飛行を実現するには、3D環境でナビゲーション経路を計画としてOMPL(Open Motion Planning Library)を試してみます。
目次
- OMPLのインストール
- OMPLの基礎 ← いまココ
- OMPL.appの入門
- OMPLの使用
- DJI Telloの使用
- navigationスタックの使い方
- OMPLで3D 経路計画
動作環境
- Ubuntu 18.04
- ROS Melodic
- Tello EDU
OMPLとは
OMPL (Open Motion Planning Library)は、サンプリングベース経路計画のアルゴリズムのパッケージです。衝突検知と可視化の機能が含まれていないので、簡単に既存システムに導入できます。ROSとMoveIt!等のシステムに既に導入されています。
用語の定義
- Workspace:
ロボットが移動する物理空間、空間の境界が障害物とします。 - State space:
ロボットが配置可能なポイント空間、1ポイントは1Stateです。 - Free state space:
障害物なしのState spaceのサブ空間です。 - Path:
State空間で衝突なしのStateポイントの連続マッピングのパスです。
経路計画問題は、State space空間で開始Stateから終点Stateまでの衝突なしのパスを探し出す問題になります。

サンプリングベース経路計画の2つタイプを説明します。
- 確率Roadmapの計画
- ツリーベースの計画
確率Roadmapの計画
probabilistic roadmap (PRM) は、State spaceのランダムサンプリングを使用して障害物なしのState spaceのroadmapを構築します。
確率Roadmapの説明例
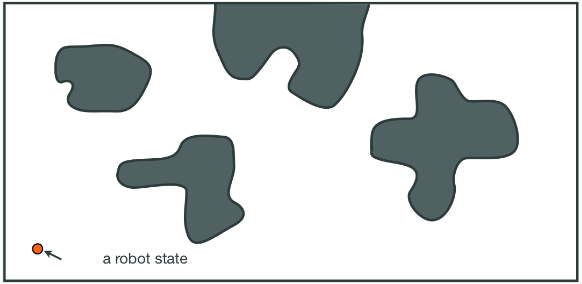
2D Workspaceと自由移動ポイントロボットの例を説明します。
-
2D Workspaceとポイントロボットの1つState
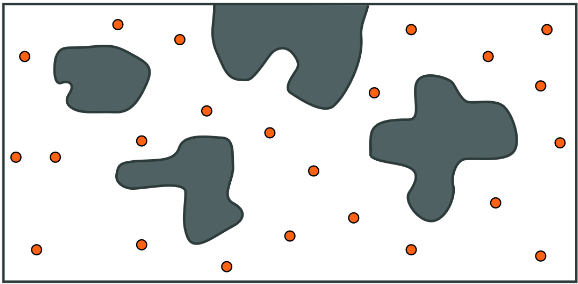
-
Free state spaceの1つ可能なランダムサンプリングのセット
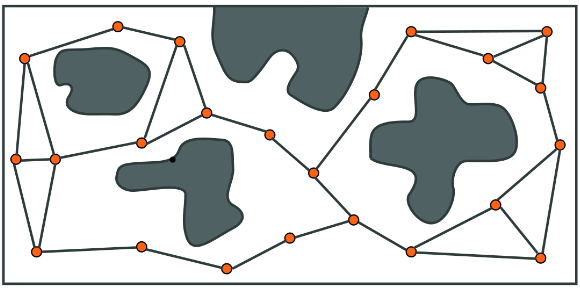
-
local plannerを使用して隣のStateを直線で連結
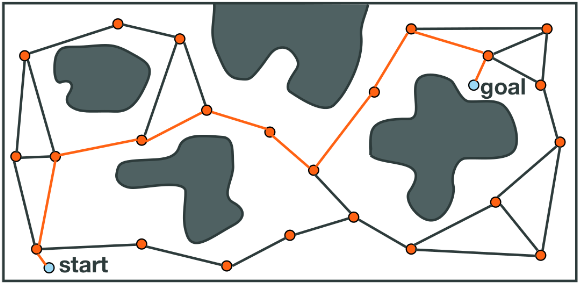
-
Startとgoal間の最短パスを探す
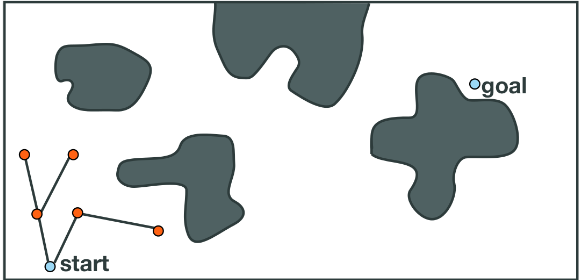
ツリーベースの計画
-
最初は少しランダムサンプルStateをツリーに連結
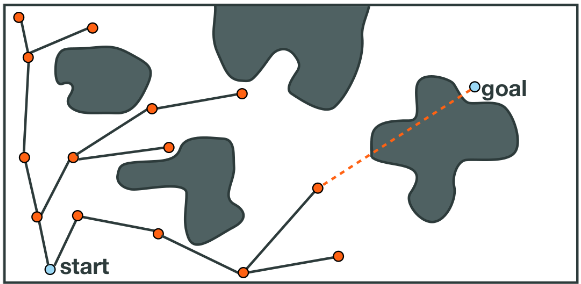
-
Goalに向けてツリーを拡張、Goalをツリーに直接連結できるかを試す(図にはまだツリーに直接連結できない)
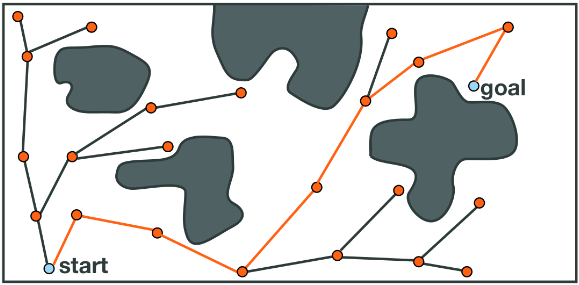
-
Goalをツリーに連結された場合、パスの探索が終了
Next: 3. OMPL.appの入門
prev: 1. OMPLのインストール