DJI Tello等ドローンの自律飛行を実現するには、3D環境でナビゲーション経路を計画としてOMPL(Open Motion Planning Library)を試してみます。
目次
- OMPLのインストール
- OMPLの基礎
- OMPL.appの入門
- OMPLの使用
- DJI Telloの使用
- navigationスタックの使い方
- OMPLで3D 経路計画
動作環境
- Ubuntu 18.04
- ROS Melodic
- Tello EDU
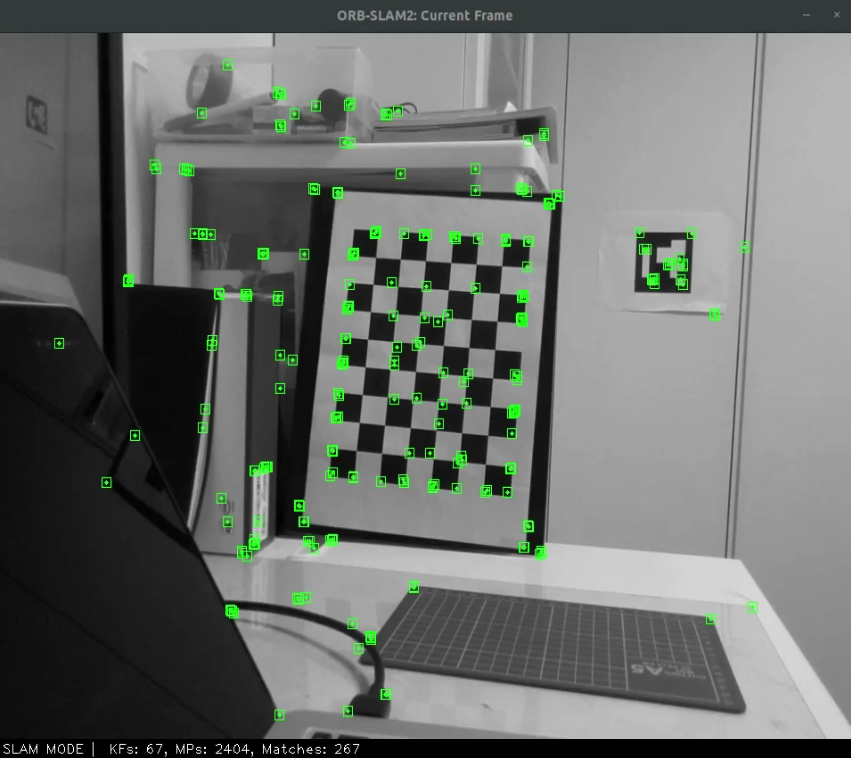
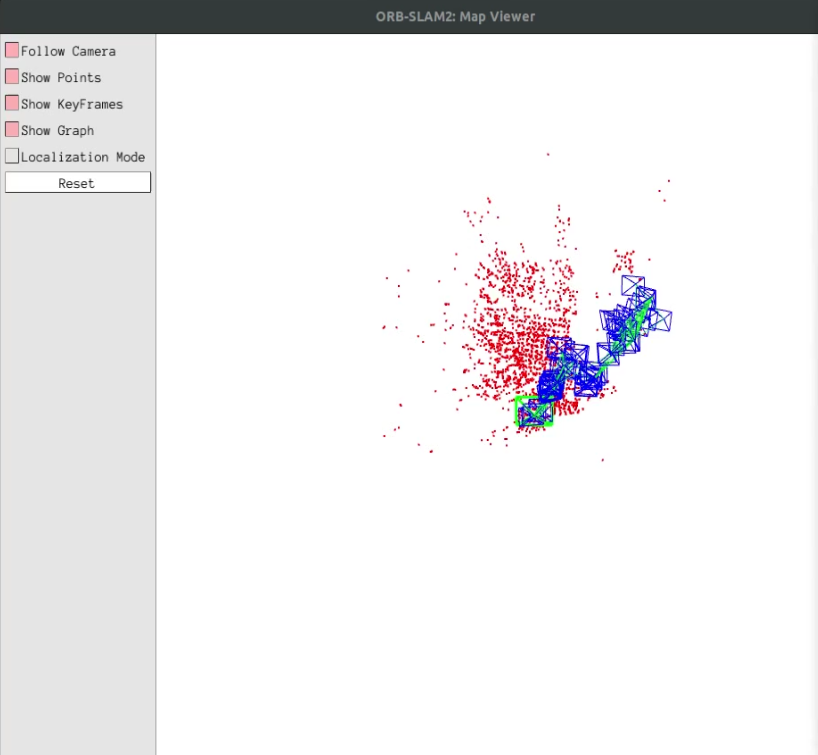
DJI Telloのカメラ でVisual-SLAMのORB-SLAM2
DJI Telloの単眼カメラでVisual-SLAM自己位置推定検証で、ORB-SLAM2 を動かしてみた。
環境
Ubuntu 18.04
ROS Melodic
Tello EDU
tello_driver
Visual-SLAMのORB-SLAM2
tello_driverのインストール
tello_driverをcatkin_wsのsrcにgit cloneします。
git clone --recursive https://github.com/appie-17/tello_driver.git
必要なライブラリのインストール
camera_info_manager_pyをcatkin_wsのsrcにgit cloneします。
git clone https://github.com/ros-perception/camera_info_manager_py.git
image_transportをインストールします。
sudo apt-get install ros-melodic-image-transport
H264動画ストリームのデコード
tello_driverの「tello_node.launch」にimage_transportのrepublishを追加します。
「/tello/image_raw/h264」から「/tello/image_raw」にデコード
<!-- <node pkg="image_transport" name="image_compressed" type="republish" args="raw in:=image_raw compressed out:=image_raw" />-->
<node pkg="image_transport" name="image_decompressed" type="republish" args="compressed in:=image_raw raw out:=image_raw">
<param name="image_transport" value="h264"/>
</node>
ORB-SLAM2のインストール
必要なライブラリのインストール
sudo apt install libglew-dev cmake libjpeg-dev libtiff5-dev libopenexr-dev libpng-dev
sudo apt install ros-melodic-tf
Pangolinのインストール
$ git clone https://github.com/stevenlovegrove/Pangolin.git
$ cd Pangolin
$ mkdir build
$ cd build
$ cmake ..
$ make -j4
$ sudo make install
ORB_SLAM2のインストール
$ git clone https://github.com/ILab-01/ORB_SLAM2.git
$ cd ORB_SLAM2
$ chmod +x build.sh
$ ./build.sh
ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ViewerAR.ccにincludeを追記します。
# include <unistd.h>
$ export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/XXX_YOUR_PATH_XXX/ORB_SLAM2/Examples/ROS
$ chmod +x build_ros.sh
$ ./build_ros.sh
ORB_SLAM2 用のカメラキャリブレーションYamlファイルの作成
DJI Telloのフロントカメラのcamera_calibration
ORB_SLAM2用カメラキャリブレーションYamlファイルの作成
tello_driverの起動
$ roslaunch tello_driver tello_node.launch
Visual-SLAMのORB-SLAM2の起動
$ rosrun ORB_SLAM2 Mono 'ORB_SLAM2/Vocabulary/ORBvoc.txt' 'ORB_SLAM2/Examples/ROS/ORB_SLAM2/calibration_tello.yaml'
ORB-SLAM2のYouTube動画
