カメラ Lidarキャリブレーション 色付き点群
lidarとカメラを使ってリアルタイムではなく、静止状態で撮影した点群データ(pcd)とカメラ画像の色付き点群を作成しようと思っています。
そのためにまずキャリブレーションを行って
カメラとlidarの外部パラメータを求めています。
以下を参考にしています
https://github.com/Livox-SDK/livox_camera_lidar_calibration
https://github.com/CIT-Autonomous-Robot-Lab/livox_cam_lidar_calib_document-ja/blob/master/README.md (日本語版)
解決したいこと
参考リポジトリ通りにカメラ画像を読み込んだのですが表示されるものが大きくターゲットボードの四隅が選択できませんでした。
リサイズした画像を利用することで、ウィンドウを小さくし選択可能な状態にはできましたが、最終的な統合結果が良好ではありません。
カメラとlidarをキャリブレーションする際に使用するカメラの画像サイズはどのように設定をすればいいのでしょうか
現在利用しているlidarとカメラは
livox aviaとz800EXR(fujifilm)というカメラを使っています


livoxaviaの視野角は下のようです。
非反復走査モード:水平70.4° × 垂直77.2°
反復走査モード:水平70.4° × 垂直4.5°
非反復操作モードを利用しています。
発生している問題・エラー
conerphotolounchで四隅を選択使用しても表示が大きい
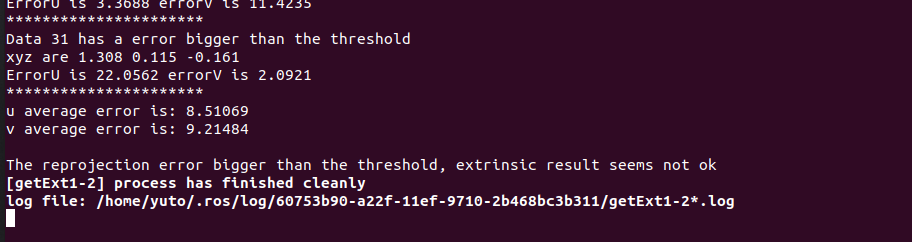
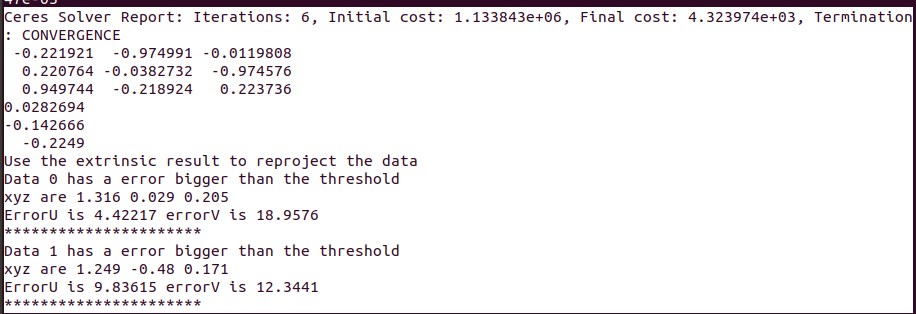
リサイズしたもので四隅を選択したが外部パラメータの計算が上手くいかなかった。
補足。
カメラの内部パラメータを求めるのにはmatlabを利用しました
https://jp.mathworks.com/help/lidar/ug/lidar-and-camera-calibration.html
0 likes
