Mini Pupper
「Mini Pupperは、学校、家庭学習、愛好家、そしてそれ以外の人々にも、ロボット工学をより身近なものにしてくれることでしょう」 by MangDang
Kickstarterが達成で終わり、日本ではMakuakeでの販売が始まっています。
公式マニュアル / Assembly instructions
MangDang公式から以下のドキュメントが提供されています。
The following documentation is provided by MangDang.
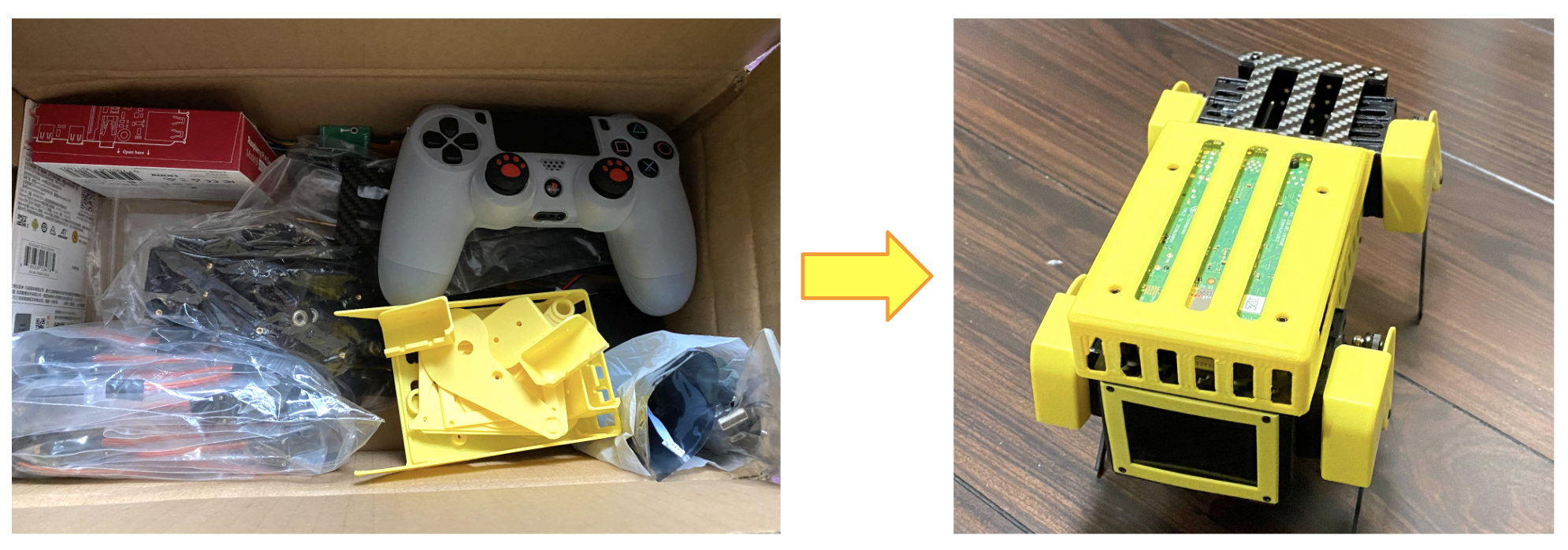
私が実際に組み立ててみて、補足があった方が悩むことなく組めると思い、記事にしました。
I actually assembled it and thought it would be easier to assemble it with supplementary information. So I wrote this article.
なお、これは2021年Kickstarter版です。
Note that this is the 2021 Kickstarter version.
組み立て方法やソフト設定の解説 / Explanation of assembly instructions and software settings
各ページ、写真たっぷりの内容ですので、6つに分割しました。
There are plenty of photos on each page, so I've divided them into six sections.
- 脚部の組み立て方 / Legs Assembly
- 臀部の組み立て方 / Hips Assembly
- ボディフレームの組み立て方 / Body Frame Assembly
- 機能コンポーネントの組み立て方 / Function Component Assembly
- ソフトウェアセットアップ / Software Setup
- 外装の組み立て方 / Cover Assembly
完成後の動き / how it works
#MiniPupper が動きましたー!
— nisshan_ にっしゃん (@nisshan_) January 2, 2022
体を揺らす様子。
Shake the body#ミニぷぱ pic.twitter.com/euUzjLyMzn
#MiniPupper が動きましたー!
— nisshan_ にっしゃん (@nisshan_) January 2, 2022
足踏みして前進する様子。
Trotting.#ミニぷぱ pic.twitter.com/YO2B89aHe3
#MiniPupper が動きましたー!
— nisshan_ にっしゃん (@nisshan_) January 2, 2022
顔の表情が変わる様子。
Changing facial expressions#ミニぷぱ pic.twitter.com/h4tkMNdDR8
謝辞 / Acknowledgments
たいりょーくん(Twitter,Qiita)、フィードバックありがとうございます。
更新(2022/02/10)
本記事の内容は、MangDangの公式組立説明サイトにて採用いただきました。身に余る光栄です。
The content of this article has been adopted by the official MangDang Assembly instruction. It is a great honour.
関連記事 / my related article
この記事はロボットを現実に作るためのものですが、PCの仮想環境(ROS)でMini Pupperを歩かせる方法は Mini Pupperの動かし方(Gazebo) に書きました。こちらもどうぞ。
This article is about building a robot in the real world. I wrote Mini Pupperの動かし方(Gazebo) about how to make Mini Pupper walk in a virtual environment (ROS) on a PC.