ドローンの自律飛行を実現するには、DronecodeとMAVSDKを試してみます。
目次
動作環境
- Ubuntu 18.04
- ROS Melodic
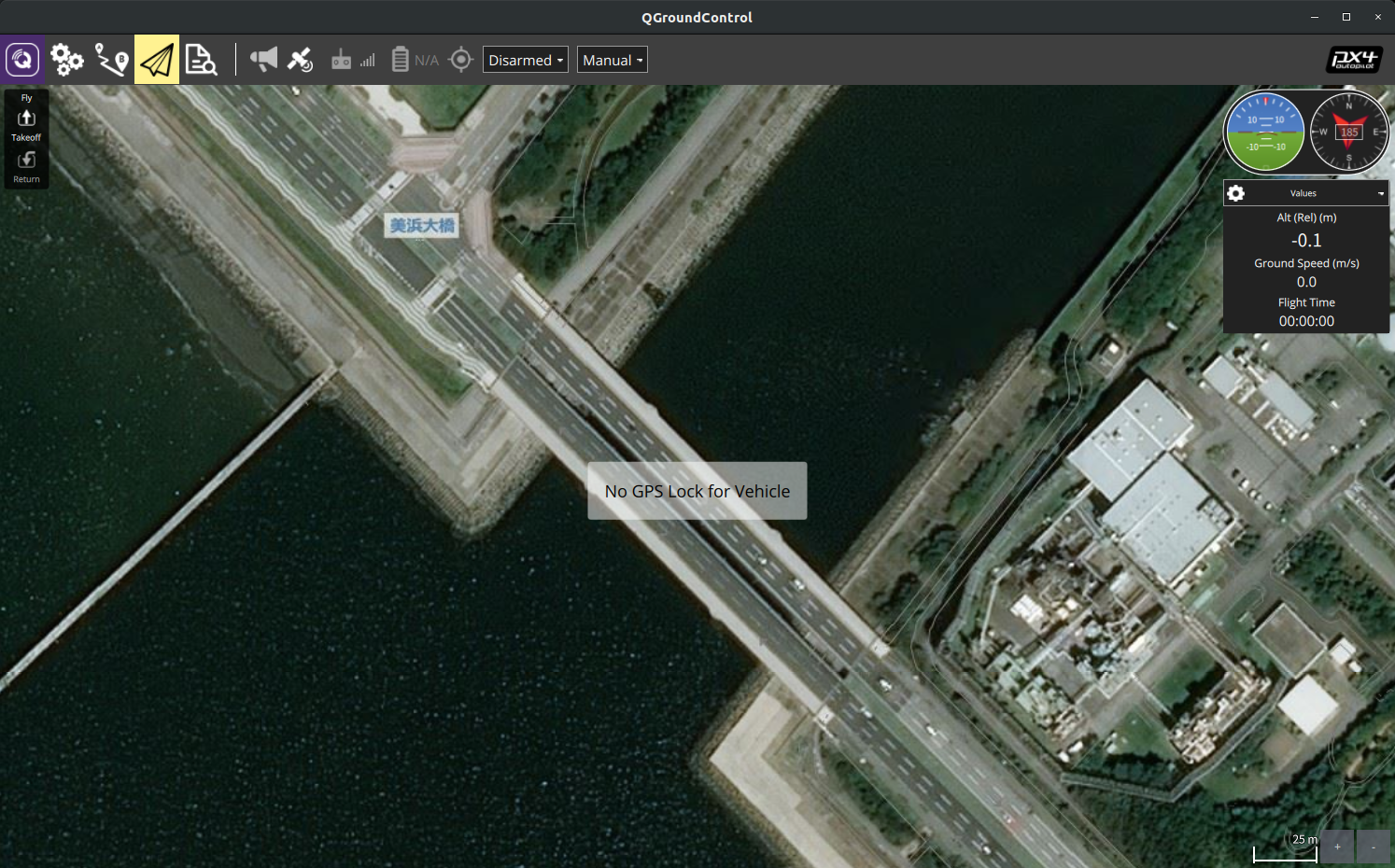
QGroundControl
QGroundControlとは、PX4、ArduPilotを搭載したドローンと車両のフライトコントロールと設定を提供するアプリです。
QGroundControlの起動
./QGroundControl.AppImage (or double click)
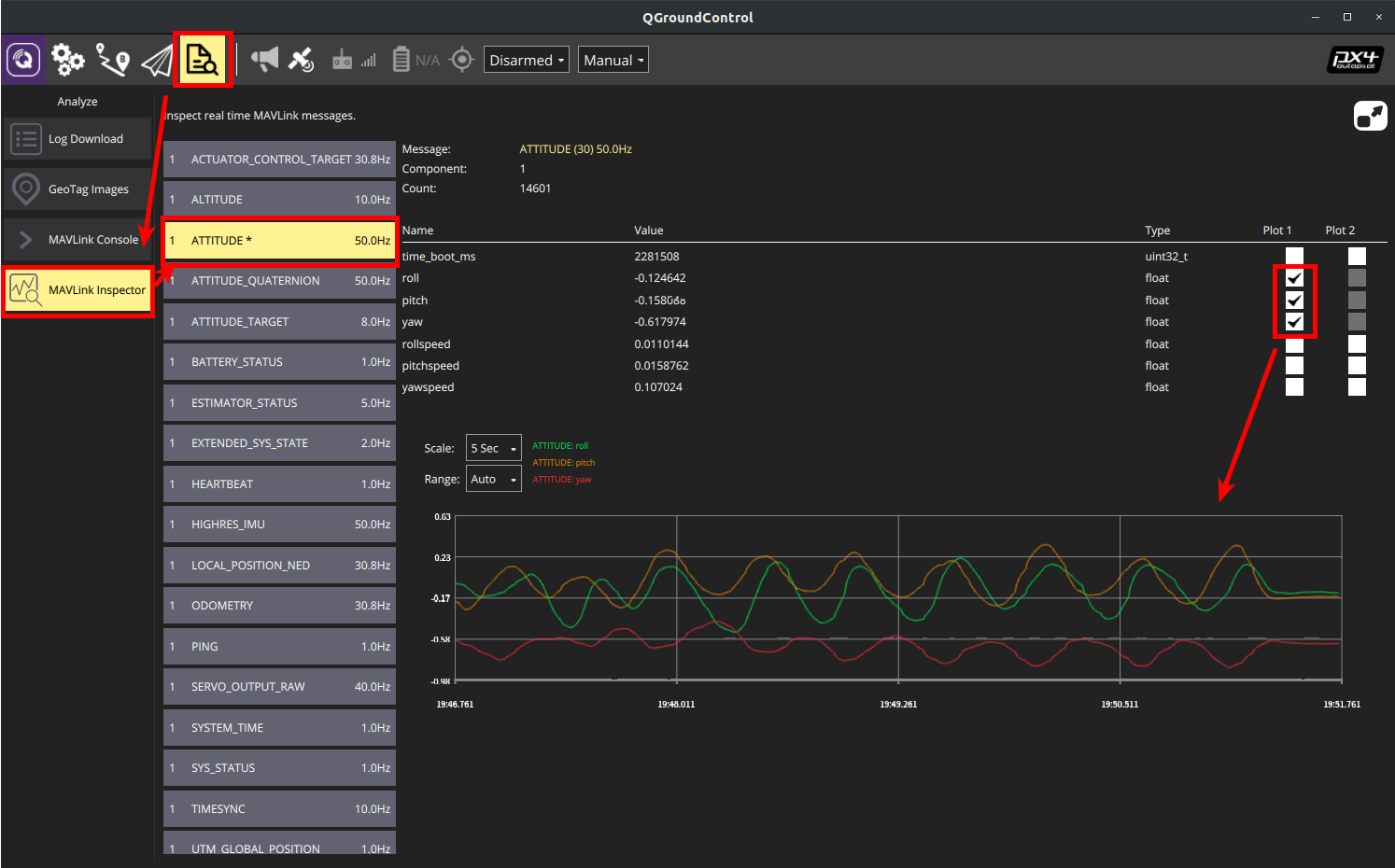
Analyze View - MAVLink Inspector
- Analyze | MAVLink Inspector | 表示したいmessages(複数選択可)を選択
- Pilot1, Pilot2でリアルタイム表示したい項目のチェックを選択
- グラフにアルタイム値を確認
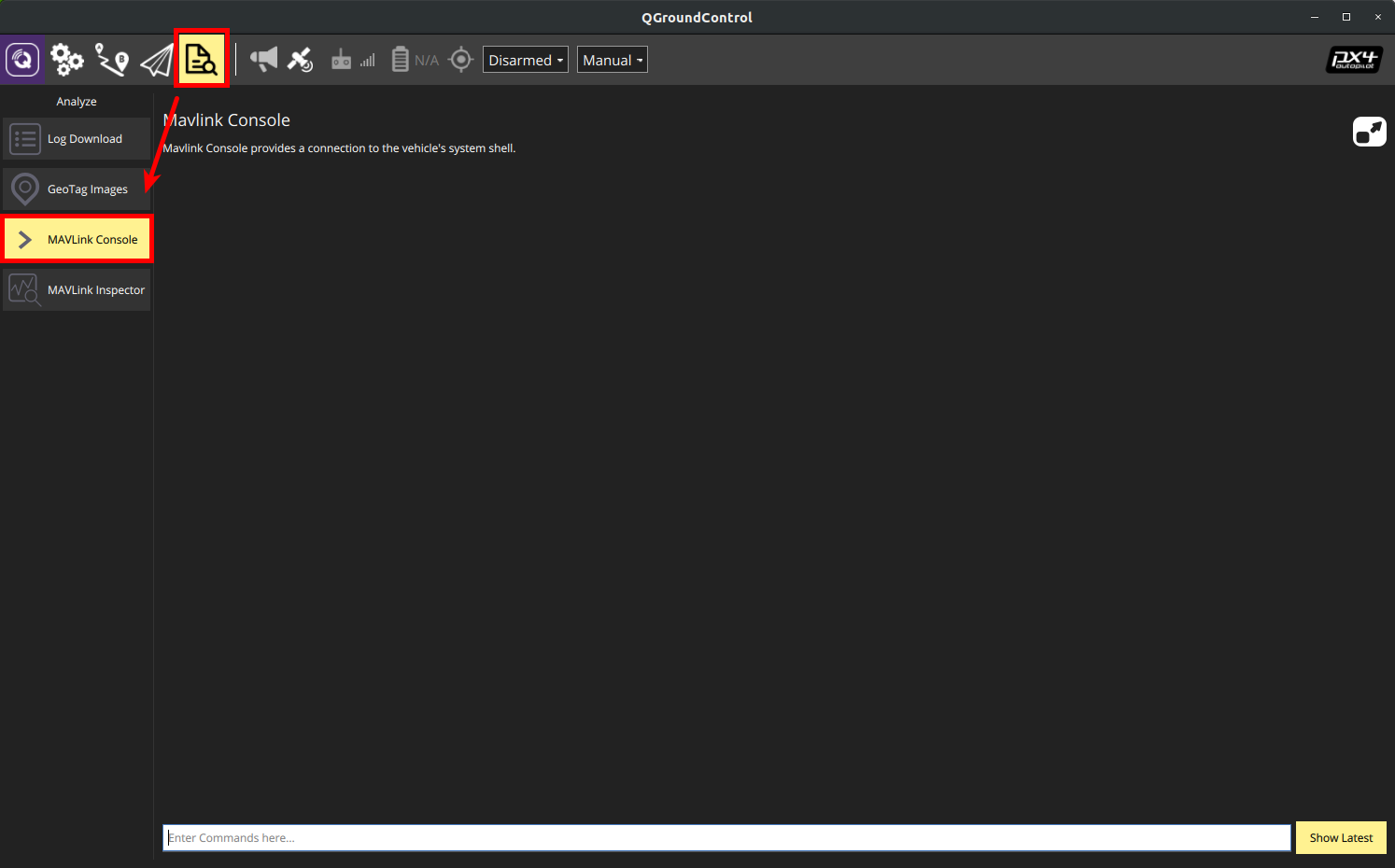
Analyze View - MAVLink Console
Mavlink Consoleは、 PX4 nsh shellに接続、コマンド発行することができます。
注:PX4 flight stackが稼働した実機のみ対応(PX4 SITLとArduPilotは対応しない)
- Analyze | MAVLink Console を選択
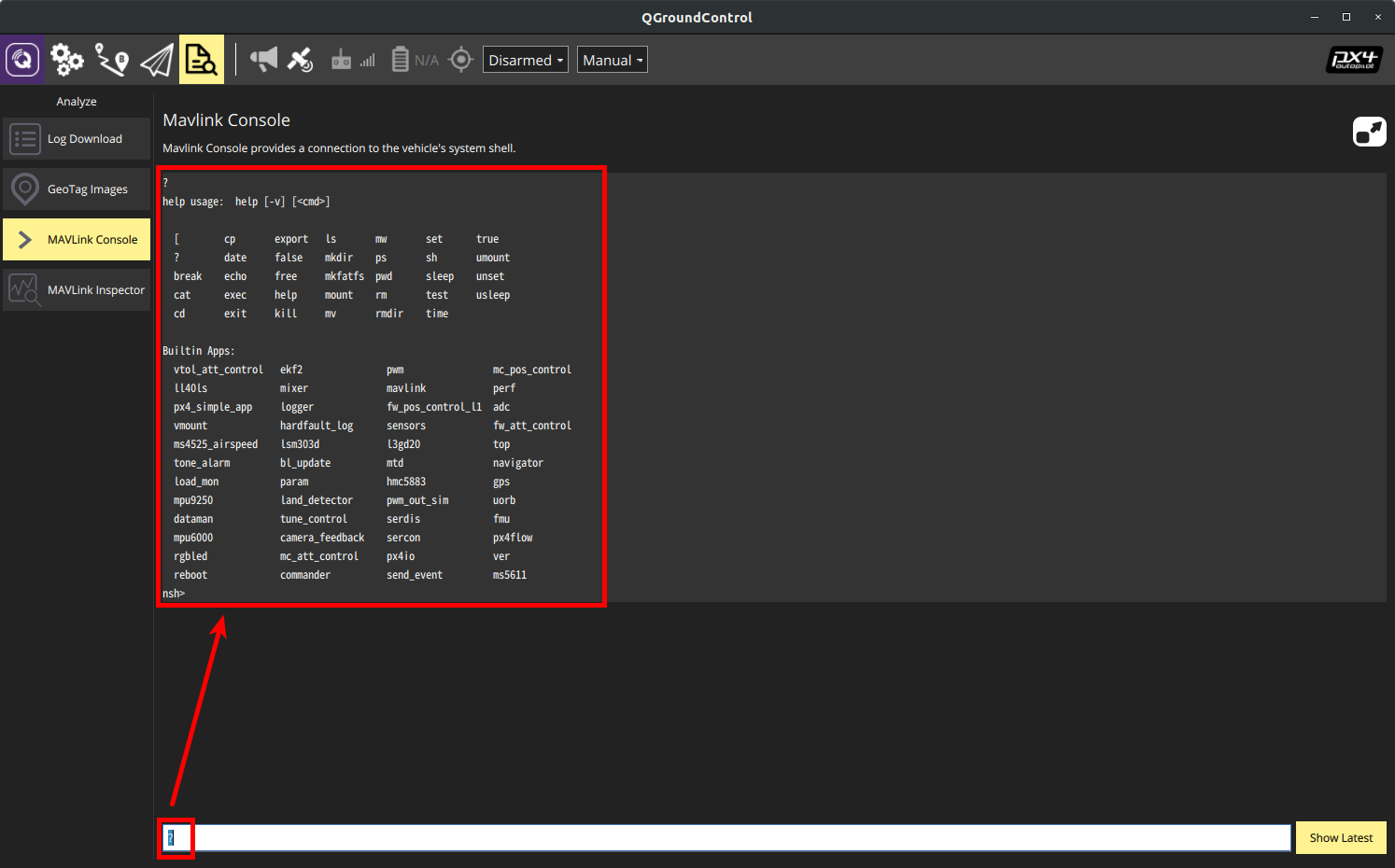
- 入力バーに「?」を入力してEnterキーを押す
- コマンド一覧と実行可能なアプリ一覧を表示