はじめに
研究で,ある探索問題を解くためにAlphaGoの勉強をしています.
学んだアルゴリズムを自分で実装をしようと思ったのですが,囲碁だととてつもない計算資源が必要になるので,スケールを落としてオセロで試してみました.
本記事では,ChainerでAlphaGoのSLポリシーネットワークを実装し,ターミナル上でプレイできるようにします.
今のところ,このAI(IaGoという名前を付けました)は先読みを一切していませんが,結構強いです.
今後,強化学習やモンテカルロ木探索も実装していくつもりです.ご期待ください!
2018年8月23日追記: 全記事公開しました.
AlphaGoの背景
囲碁の難しさは第一に,そのパターンの多さにあります.探索空間の広さは$10^{360}$と言われており,表のとおり他のゲームよりも広いことがわかります.
| ゲーム | 探索空間の広さ | AIが人間に勝った年 | AI | 対戦した人 |
|---|---|---|---|---|
| オセロ | $10^{60}$ | 1997 | NEC Logistello | 世界チャンピオン 村上健 |
| チェス | $10^{120}$ | 1997 | IBM Deep Blue | 世界チャンピオン Garry Kasparov |
| 将棋 | $10^{220}$ | 2013 | 東京大学 GPS将棋 | 三浦弘行 八段 |
| 囲碁 | $10^{360}$ | 2016 | DeepMind AlphaGo | 李世乭 九段 |
$10^{360}$というと,もう「億」や「兆」のような名前すらない規模でイメージもできませんが,観測可能な宇宙に存在する原子の総数と言われている$10^{80}$よりもずっと大きいのですから驚異的です.
ちなみに,情報の世界では「天文学的数字」よりも大きい数字がしばしば出てくるので,「組合せ論的数字」なんて言い方も耳にすることがあります.
この膨大なパターン数が原因で,AlphaGoが開発されるまでは「AIが囲碁で人間に勝利するまであと10年はかかる」と言われていましたが,2016年にディープラーニングを応用したAlphaGoが李世乭九段を破り世界を驚かせました.
AlphaGoのすごさを感じていただけたでしょうか?でも,$10^{360}$の世界で戦う人間の棋士もすごいですよね.
ともあれ,囲碁は難しいので私はオセロにしました.
必要なもの
ディープラーニングの基礎とChainerの基本的な使い方に関する知識を前提とします.
訓練から試す場合はGPUが無いと厳しいと思います.
完成したAIと対戦してみる
IaGoという名前をつけてソースコードを公開しています.
ターミナルで次のコマンドを順に実行すればゲームが始まります.詳しくはリンク先のREADMEを読んでください.
$ pip install chainer
$ git clone git@github.com:shionhonda/IaGo.git
$ python ./IaGo/game.py
*Iago: Shakespear『オセロ』の登場人物
AlphaGoの全体像
AlphaGoで用いられているアルゴリズムは,SLポリシーネットワーク,RLポリシーネットワーク,バリューネットワーク,モンテカルロ木探索の4つに分けることができます.
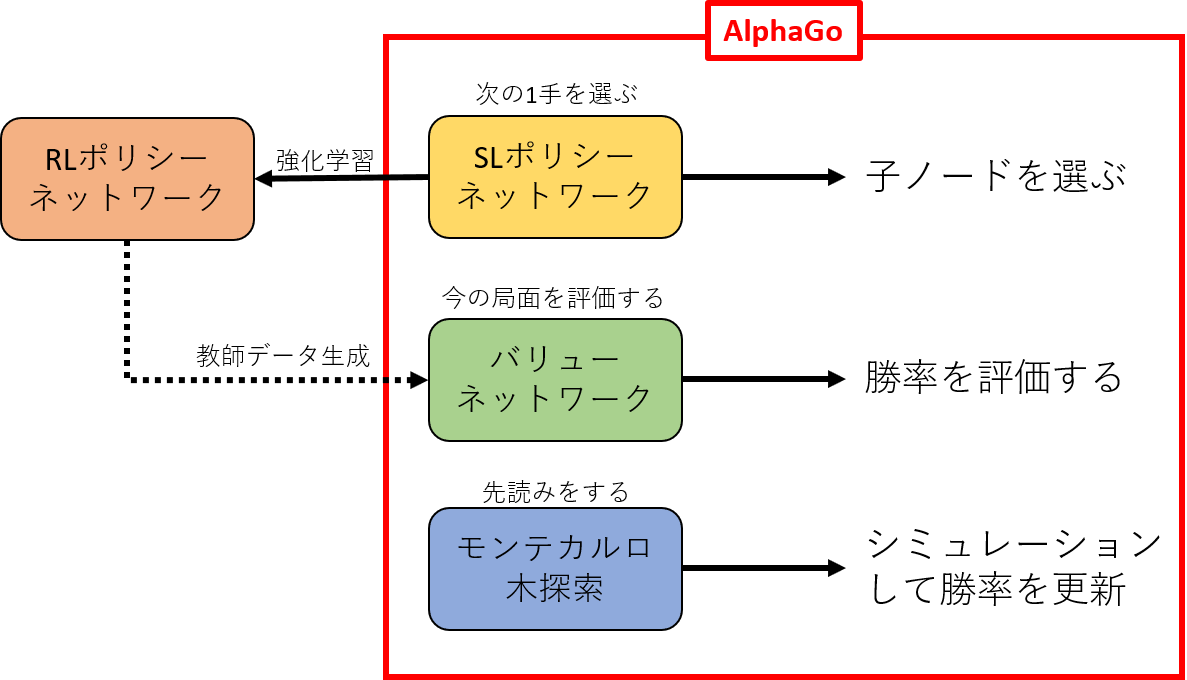
SLポリシーネットワーク
畳込みニューラルネットワーク(CNN; convolutional neural network)によって,ある局面から最適な次の一手を選択します.先読みはしません.
今回実装したのはこのSLポリシーネットワークです.
なお,AlphaGoでは,SLポリシーネットワークを単純化・高速化したロールアウトポリシーというものを用意して,モンテカルロ木探索のプレイアウトに使っています.
*SLは教師あり学習(supervised learning)の略
RLポリシーネットワーク
SLポリシーネットワークを元にして,自己対戦による強化学習でパラメータを調整したものです.
自己対戦の勝敗を報酬としてフィードバックを与えてあるので,極めて近視眼的なSLポリシーネットワークに「ゲームの勝敗」という大局的視点が加わっています.
バリューネットワークの教師データ生成に使いますが,AlphaGoそのものには使いません.
*RLは強化学習(reinforcement learning)の略
こちらは第2回で取り上げます.
AlphaGoを模したオセロAIを作る(2): RLポリシーネットワーク - Qiita
バリューネットワーク
ある局面から「勝てる見込み」を算出する評価関数です.
まず,入力された局面からRLポリシーネットワークによるプレイアウト(自己対戦を終局まで行うこと)を繰り返し,局面と勝率のデータセットを作ります.
このデータセットをCNNで学習し,局面から勝率を出力するネットワークを作ります.
こちらは第3回で取り上げます.
AlphaGoを模したオセロAIを作る(3): バリューポリシーネットワーク - Qiita
モンテカルロ木探索
囲碁やオセロを上手にプレイするには,「自分が次Aに打ったら盤面がこうなって,そうすると相手はBかCに打って…」と先読みすることが必要です.
しかし,囲碁では探索空間が膨大なので,全ての可能性を探索することは現実的な時間では不可能です.
この問題を解決するのがモンテカルロ木探索で,バリューネットワークにより局面の勝率を評価しながら,勝率の高い局面は深く探索し,勝率の低い局面をなるべく探索しないというアルゴリズムです.
こちらは第4回で取り上げます.
AlphaGoを模したオセロAIを作る(4): モンテカルロ木探索 - Qiita
データの用意
それではIaGoの実装に入ります.
まずはデータを用意しましょう.
データ取得
約23万対局分のオンラインオセロの棋譜がこちらで公開されています.
が,そのうち勝った方だけのデータをtxtファイルにまとめてくださった方がいるので,以下のリンク先で入手しdata.txtとして保存してください.
オセロの教師データ公開【ディープラーニング】 - Deeplearning とか 人工知能とか
データ読込み
リンクの説明に従って,「盤面」と「石を置く位置」の配列を作成します.
# data.txtを1行ずつ展開してstate(盤面)とaction(石を置く場所)を返す
def transform(string):
flat = string.replace("\n", "").split(" ")
state = np.array([int(flat[j]) for j in range(64)]).reshape(8,8)
action = (int(flat[65])-1)*8 + int(flat[64])-1
return state, action
def main():
print("Loading data... (it might take a few minutes)")
with open("../policy_data/txt/data.txt", "r") as f:
data = f.readlines()
# 白黒分けて保存する
B_data = [] # 黒
W_data = [] # 白
for line in data:
if 'B' in line:
B_data.append(line)
elif 'W' in line:
W_data.append(line)
len_B = len(B_data)
len_W = len(W_data)
# listをndarrayに変換
states = np.zeros([len_B+len_W, 8, 8]) # 盤面
actions = np.zeros(len_B+len_W) # 石を置く位置
for i in range(0, len_B):
states[i,:,:], actions[i] = transform(B_data[i])
for i in range(len_B, len_B+len_W):
st, actions[i] = transform(W_data[i-len_B])
# 白の手は黒の手として読み込む(AIは黒番)
st[np.where(st==0)] = 3
states[i,:,:] = 3-st
del B_data, W_data # メモリ解放
'''後略'''
このAIは白番で後手なので逆になっていることに気づきましたが,おそらく大きな影響はないでしょう.
2018年8月14日追記: 元データと数字の割り当てを逆にしているので問題ありませんでした.
データ拡張
stateとactionの組が約607万セットできました.3GBくらいになると思います.
ここで,オセロの盤を90度回転・反転することによりデータを8倍に拡張することができます.メモリに余裕のある方は欲張ってみましょう.
stateの回転と転置はnumpyの組込み関数で簡単にできるので,actionが示す座標を回転・転置する関数を作ります.
rotate関数の式の導出は省略しますが,回転行列と平行移動の組合せです(高校数学を思い出しましょう!).
# 反時計回りに90度回転
# actionは0-63の数字で盤上の位置を表す
# 回転するときは,中心が原点,左上のマスが(-3.5, -3.5)になるように軸をずらす
def rotate(action):
y, x = action//8-3.5, action%8-3.5
y_, x_ = -x+3.5, y+3.5
return y_*8+x_
# 転置
# 転置するときは,中心が原点,左上のマスが(-3.5, -3.5)になるように軸をずらす
def transpose(action):
y, x = action//8-3.5, action%8-3.5
y_, x_ = x+3.5, y+3.5
return y_*8+x_
これらの関数をmain関数に追加します.
def main():
with open("../policy_data/txt/data.txt", "r") as f:
'''中略'''
del B_data, W_data #メモリ解放
print("Augmenting data... (it might take a few minutes)")
S = states # 拡張した盤面
A = actions # 拡張した位置
# 90度回転を3回
for i in range(3):
states = np.rot90(states, k=1, axes=(1,2))
S = np.concatenate([S, states], axis=0)
actions = rotate(actions)
A = np.concatenate([A, actions], axis=0)
# 転置
states = states.transpose(0,2,1)
S = np.concatenate([S, states], axis=0)
actions = transpose(actions)
A = np.concatenate([A, actions], axis=0)
# 90度回転を3回
for i in range(3):
states = np.rot90(states, k=1, axes=(1,2))
S = np.concatenate([S, states], axis=0)
actions = rotate(actions)
A = np.concatenate([A, actions], axis=0)
del states, actions # メモリ解放
'''後略'''
これで,stateとactionの組が約4856万セットできました.
このままだとデータが対局の順番になっているので,シャッフルしたうえで訓練データとテストデータに分割し,保存します.
def main():
with open("../policy_data/txt/data.txt", "r") as f:
'''中略'''
del states, actions
print("Saving data...")
data_size = A.shape[0]
test_size = 1000
rands = np.random.choice(data_size, data_size, replace=False)
S_test = S[rands[:test_size],:,:] # 1000個はテスト用
A_test = A[rands[:test_size]]
np.save('../policy_data/npy/states_test.npy', S_test)
np.save('../policy_data/npy/actions_test.npy', A_test)
del S_test, A_test # メモリ解放
S_train = S[rands[test_size:],:,:] # 残りは訓練用
A_train = A[rands[test_size:]]
np.save('../policy_data/npy/states.npy', S_train)
np.save('../policy_data/npy/actions.npy', A_train)
del S, A, S_train, A_train # メモリ解放
モデル構築
次はモデルの構築です.
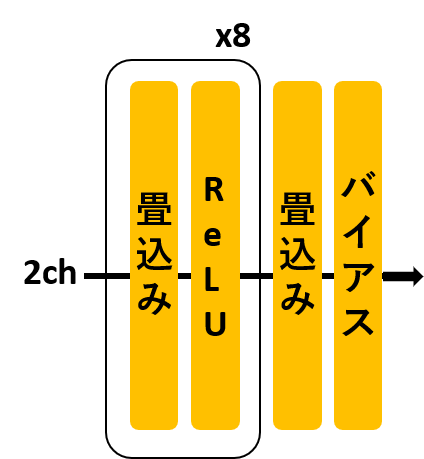
AlphaGoのSLポリシーネットワークを元にして,図のようなモデルをChainerで書きました.
実際のAlphaGoは特徴抽出をして入力を48チャネルとしていますが,IaGoでは「黒石が存在するか」と「白石が存在するか」の2チャネルのみとしました.
その他は,層やチャネル数を減らすなどの小さな変更しか与えていません.
import chainer
import chainer.functions as F
import chainer.links as L
# 畳込みとReLUをブロックにまとめる
class Block(chainer.Chain):
def __init__(self, out_channels, ksize, pad=1):
super(Block, self).__init__()
with self.init_scope():
# 入力チャネル数をNoneとすると自動で設定される
self.conv = L.Convolution2D(None, out_channels, ksize, pad=pad)
def __call__(self, x):
h = self.conv(x)
return F.relu(h)
# SLポリシーネットワーク
class SLPolicy(chainer.Chain):
def __init__(self):
ksize = 3
super(SLPolicy, self).__init__()
with self.init_scope():
self.block1 = Block(64, ksize)
self.block2 = Block(128, ksize)
self.block3 = Block(128, ksize)
self.block4 = Block(128, ksize)
self.block5 = Block(128, ksize)
self.block6 = Block(128, ksize)
self.block7 = Block(128, ksize)
self.block8 = Block(128, ksize)
self.conv9 = L.Convolution2D(128, 1, 1, nobias=True)
self.bias10 = L.Bias(shape=(64))
def __call__(self, x):
h = self.block1(x)
h = self.block2(h)
h = self.block3(h)
h = self.block4(h)
h = self.block5(h)
h = self.block6(h)
h = self.block7(h)
h = self.block8(h)
h = self.conv9(h)
h = F.reshape(h, (-1,64)) # -1にした要素は自動で設定される
h = self.bias10(h)
h = F.softmax(h, axis=1)
return h
学習
図のように,盤面(state)を2チャネルに分けた入力から,64通りの打つ場所(action)に分類するモデルを学習させます.
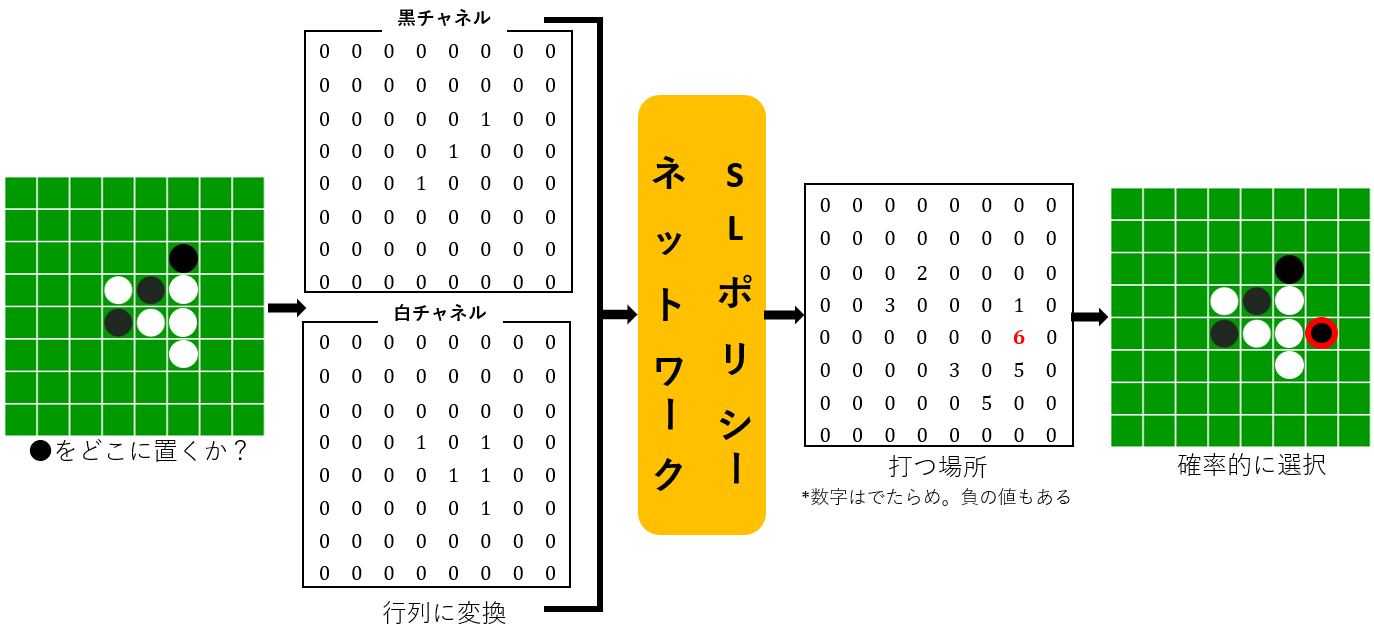
損失関数は交差エントロピー,最適化アルゴリズムはAdamとしました(AlphaGoではSGD).
import argparse
import numpy as np
from tqdm import tqdm
import chainer
import chainer.functions as F
import chainer.links as L
from chainer import serializers, cuda, optimizers, Variable
import network
# 教師データをGPU用に変換する
def transform(x, y):
x = np.stack([x==1, x==2], axis=0).astype(np.float32)
X = Variable(cuda.to_gpu(x.transpose(1,0,2,3)))
Y = Variable(cuda.to_gpu(y.astype(np.int32)))
return X, Y
def main():
# エポック数とGPU番号の指定
parser = argparse.ArgumentParser(description='IaGo:')
parser.add_argument('--epoch', '-e', type=int, default=30, help='Number of sweeps over the dataset to train')
parser.add_argument('--gpu', '-g', type=int, default="0", help='GPU ID')
args = parser.parse_args()
# モデル定義
model = network.SLPolicy()
optimizer = optimizers.Adam()
optimizer.setup(model)
optimizer.add_hook(chainer.optimizer_hooks.WeightDecay(5e-4))
cuda.get_device(args.gpu).use()
'''後略'''
次が学習部分です.
繰り返しになりますが,入力はstateそのものではなく,黒石が存在するかどうか,白石が存在するかどうかのbool配列を2チャネルで入力しています.
学習ループをtrainerで実装できればよかったのですが,わかりませんでした.
また,進捗状況を示すためにtqdmを利用しました.
1エポックの計算に1時間ほどかかります.
def main():
parser = argparse.ArgumentParser(description='IaGo:')
'''中略'''
cuda.get_device(args.gpu).use()
X_test = np.load('../policy_data/npy/states_test.npy')
y_test = np.load('../policy_data/npy/actions_test.npy')
X_test, y_test = transform(X_test, y_test)
X_train = np.load('../policy_data/npy/states.npy')
y_train = np.load('../policy_data/npy/actions.npy')
train_size = y_train.shape[0]
minibatch_size = 4096 # 2**12
# 学習ループ
for epoch in tqdm(range(args.epoch)):
model.to_gpu(args.gpu)
# 訓練データのシャッフル
rands = np.random.choice(train_size, train_size, replace=False)
X_train = X_train[rands,:,:]
y_train = y_train[rands]
# ミニバッチ学習
for idx in tqdm(range(0, train_size, minibatch_size)):
x = X_train[idx:min(idx+minibatch_size, train_size), :, :]
y = y_train[idx:min(idx+minibatch_size, train_size)]
x, y = transform(x, y)
pred_train = model(x)
loss_train = F.softmax_cross_entropy(pred_train, y)
model.cleargrads()
loss_train.backward()
optimizer.update()
# ロスと正解率の計算
with chainer.using_config('train', False):
with chainer.using_config('enable_backprop', False):
pred_test = model(X_test)
loss_test = F.softmax_cross_entropy(pred_test, y_test).data
test_acc = F.accuracy(pred_test, y_test).data
print('\nepoch :', epoch, ' loss :', loss_test, ' accuracy:', test_acc)
# ログ
with open("../log/sl.txt", "a") as f:
f.write(str(loss_test) + ", " + str(test_acc) + "\n")
# モデル保存
model.to_cpu()
serializers.save_npz('../models/sl_model.npz', model)
serializers.save_npz('../models/sl_optimizer.npz', optimizer)
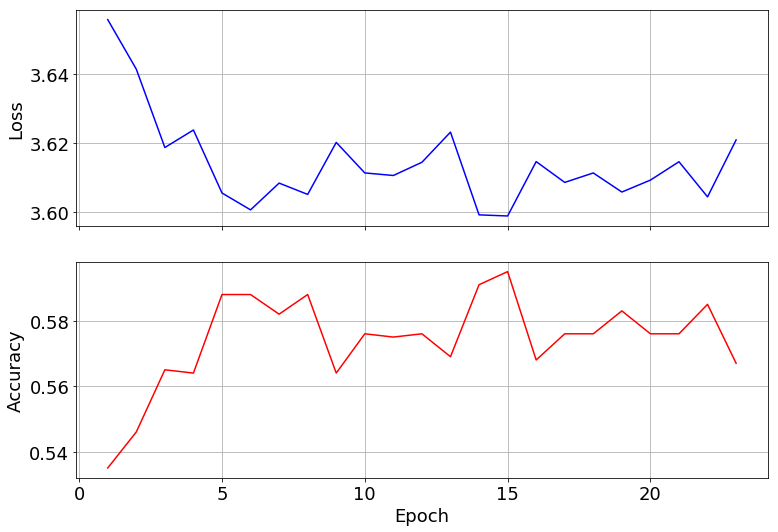
長めに学習させてロスと正解率を出力してみました.
5-15エポックくらいで十分そうですね.ちなみに,AlphaGoの正解率は57%程度だそうです.
ゲームの実装
ターミナル上で対話形式でプレイできるようにしました.
ルールを実装する部分が地味に大変でした.
詳細はソースコードのgame.pyとself_play.pyをご覧ください.
人間 vs AI
まずは,ゲームに必要な盤面などを定義します.
gamelogには棋譜を保存します.
class Game:
def __init__(self):
# 盤面の初期化
self.state = np.zeros([8, 8], dtype=np.float32)
self.state[4, 3] = 1
self.state[3, 4] = 1
self.state[3, 3] = 2
self.state[4, 4] = 2
# ゲーム内変数
self.stone_num = 4 # 盤上の石の数
self.play_num = 1 # 何手目か
self.pass_flg = False # 前の手がパスならTrue
self.date = datetime.now().strftime("%Y-%m-%d-%H-%M") # ログのファイル名に使う
self.gamelog = "IaGo v1.3\n" + self.date + "\n"
# モデル読込み
self.model = L.Classifier(SLPolicy.SLPolicyNet(), lossfun=softmax_cross_entropy)
serializers.load_npz('./models/sl_model.npz', self.model)
次に重要なのは,手を選択するインターフェイス部分です.
ここで,先ほど学習したSLポリシーネットワークが利用され,確率分布action_probabilitiesに従って手を選択します.
colorは石の色を表す変数で,1なら白番,2なら黒番を示します.
class Game:
def get_position(self, color, positions):
# 人間のターン(白番)
if color==1:
position = [int(e) for e in self.safeinput()]
if not position in positions:
print("This position is invalid. Choose another position")
return self.get_position(color, positions) # ルール違反の場合はもう一度選ばせる
# AIのターン(黒番)
else:
# SLポリシーネットワークで次の手を選択する
X = np.stack([self.state==1, self.state==2], axis=0).astype(np.float32)
state_var = chainer.Variable(X.reshape(2,1,8,8).transpose(1,0,2,3))
action_probabilities = self.model1.predictor(state_var).data.reshape(64)
action_probabilities -= np.min(action_probabilities) # 確率に変換するために,すべての要素を正にする
distrib = action_probabilities/np.sum(action_probabilities)
idx = np.random.choice(64, p=distrib) # 確率的に選択
position = [idx//8+1, idx%8+1]
if not position in positions:
# ルール違反の場合はもう一度選ぶ
return self.get_position(2, positions)
return position
次に,石を置いて挟まれた石を裏返すplace_stoneや,盤面を表示するshow,合法手の選択肢を返すvalid_posなどの関数を定義してから,1ターンで行う処理をturn関数にまとめます.
class Game:
def turn(self, color):
players = ["You", "AI"]
positions = self.valid_pos(color) # 合法手の座標
print("Valid choice:", positions)
if len(positions)>0:
# 合法手が存在するなら,石を置く座標を選択する
position = self.get_position(color, positions)
self.place_stone(position, color)
self.show()
self.pass_flg = False
self.gamelog += "[" + str(self.play_num) + "]" + players[color-1]\
+ ": " + str(position) + "\n"
self.stone_num += 1
else:
# 合法手が存在しないならパス
if self.pass_flg:
self.stone_num = 64 # パスが2回続いたらゲーム終了
print(players[color-1] + " pass.")
self.pass_flg = True
self.gamelog += "[" + str(self.play_num) + "]" + players[color-1] + ": Pass\n"
self.play_num += 1
最後に,ゲームの開始から終了までの処理をmain関数にまとめます.
def main():
print("\n"+"*"*34)
print("*"*11+"Game Start!!"+"*"*11)
print("*"*34+"\n")
game = Game()
game.show()
while(game.stone_num<64): # 盤が埋まるまで繰り返す
game.turn(1)
game.turn(2)
print("\n"+"*"*34)
print("*"*12+"Game End!!"+"*"*12)
print("*"*34)
jd = game.judge()
print(jd)
game.gamelog += jd + "\n"
game.save_gamelog()
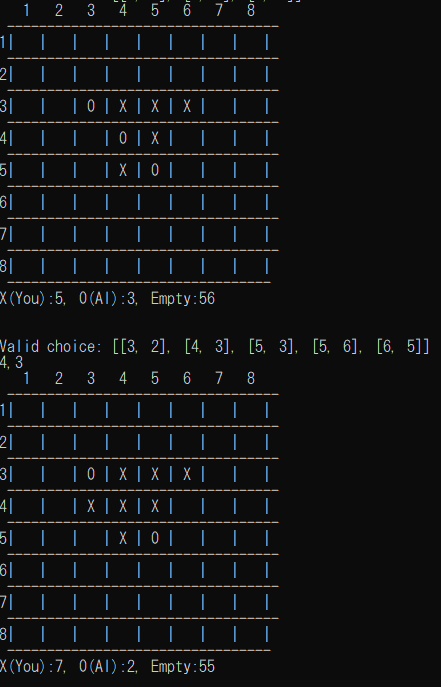
game.pyを実行すると,こんな感じで対戦が進みます.
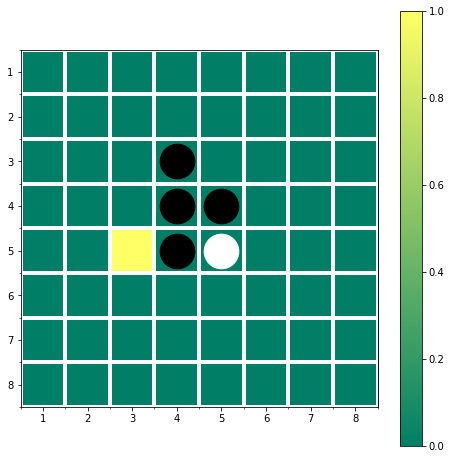
途中でaction_probabilitiesを取り出し,カラーマップで表示してみました.
AIが各マスに白石を置く確率が色で示されています.
[5,3]を除いて,他のマスはほぼ確率0になっています.[3,3]や[3,5]も悪手なのでしょうか.
色を対数スケールにしてみると,小さい値の差がはっきりします.
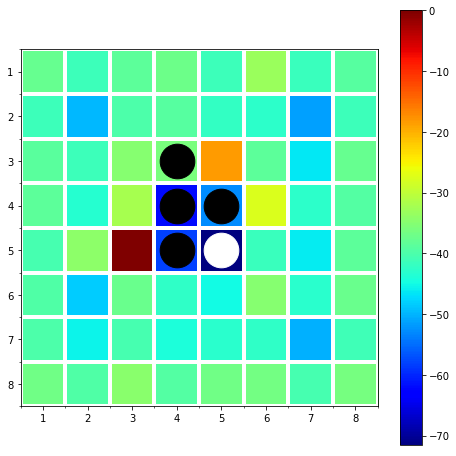
おもしろい結果ですね!
[2,2]や[7,7]のような「四隅の1つ内側」は確率が非常に低くなっていて,悪手であることが学習されています.
また,同じ合法手でも[3,3]と[3,5]はかなり違いがあります.
AI vs AI
game.pyのget_position関数で,人間のターンのところもSLポリシーネットワークで手を選択させれば,AIの自己対戦ができます.
コードがうまく動くかのテストにも使えるので,実装しておくと便利です.
from game import Game
class SelfGame(Game):
def get_position_self(self, color, positions):
# AIが黒番のときは黒と白を入れ替えたものを入力する
if color==1:
tmp = 3*np.ones([8,8], dtype=np.float32)
self.state = self.state*(tmp-self.state)*(tmp-self.state)/2
# SLポリシーネットワークで次の手を選択する
X = np.stack([self.state==1, self.state==2], axis=0).astype(np.float32)
state_var = chainer.Variable(X.reshape(2,1,8,8).transpose(1,0,2,3))
if color==1:
action_probabilities = self.model1.predictor(state_var).data.reshape(64)
else:
action_probabilities = self.model2.predictor(state_var).data.reshape(64)
action_probabilities -= np.min(action_probabilities) # 確率に変換するために,すべての要素を正にする
distrib = action_probabilities/np.sum(action_probabilities)
idx = np.random.choice(64, p=distrib) # 確率的に選択
position = [idx//8+1, idx%8+1]
if not position in positions:
# ルール違反の場合はもう一度選ぶ
return self.get_position_self(color, positions)
return position
最後までお読みいただきありがとうございました!
次回記事はこちら.
AlphaGoを模したオセロAIを作る(2): RLポリシーネットワーク - Qiita
参考文献
[1] D. Silver et al., "Mastering the game of Go with deep neural networks and tree search," nature, Vol. 529, No. 7587, pp. 484-489, 2016.
DeepMindによるAlphaGoの論文です.
[2] 大槻知史, 三宅陽一郎, 『最強囲碁AI アルファ碁 解体新書 深層学習,モンテカルロ木探索,強化学習から見たその仕組み』, 翔泳社, 2017.
原著論文[1]の解説書です.非常にわかりやすかったです.
[3] 720万手をディープラーニングで学習したオセロAIをChainerで作ってみた - Qiita
モデルの構築やルールの実装などで参考にさせていただきました.
[4] AlphaGoの論文解説とAIが人間を超えるまで - A Successful Failure
無料で読めるものだとこれがわかりやすいです.