複数画像間における特徴点の対応付け
解決したいこと
画像処理や画像の幾何の初心者です。コンピュータビジョンにおいて、複数の画像における共通の特徴点の対応付けを行いたいのですが、効果的なやり方が分かりません。具体的には、バンドル調整のような問題に使いたいと思っています。
自分で試したこと
- 2枚の画像間における特徴点の対応付けはできる
- 2枚の画像間の対応付けの方法を、複数画像に総当りで適用する実例を調査した[LINK]
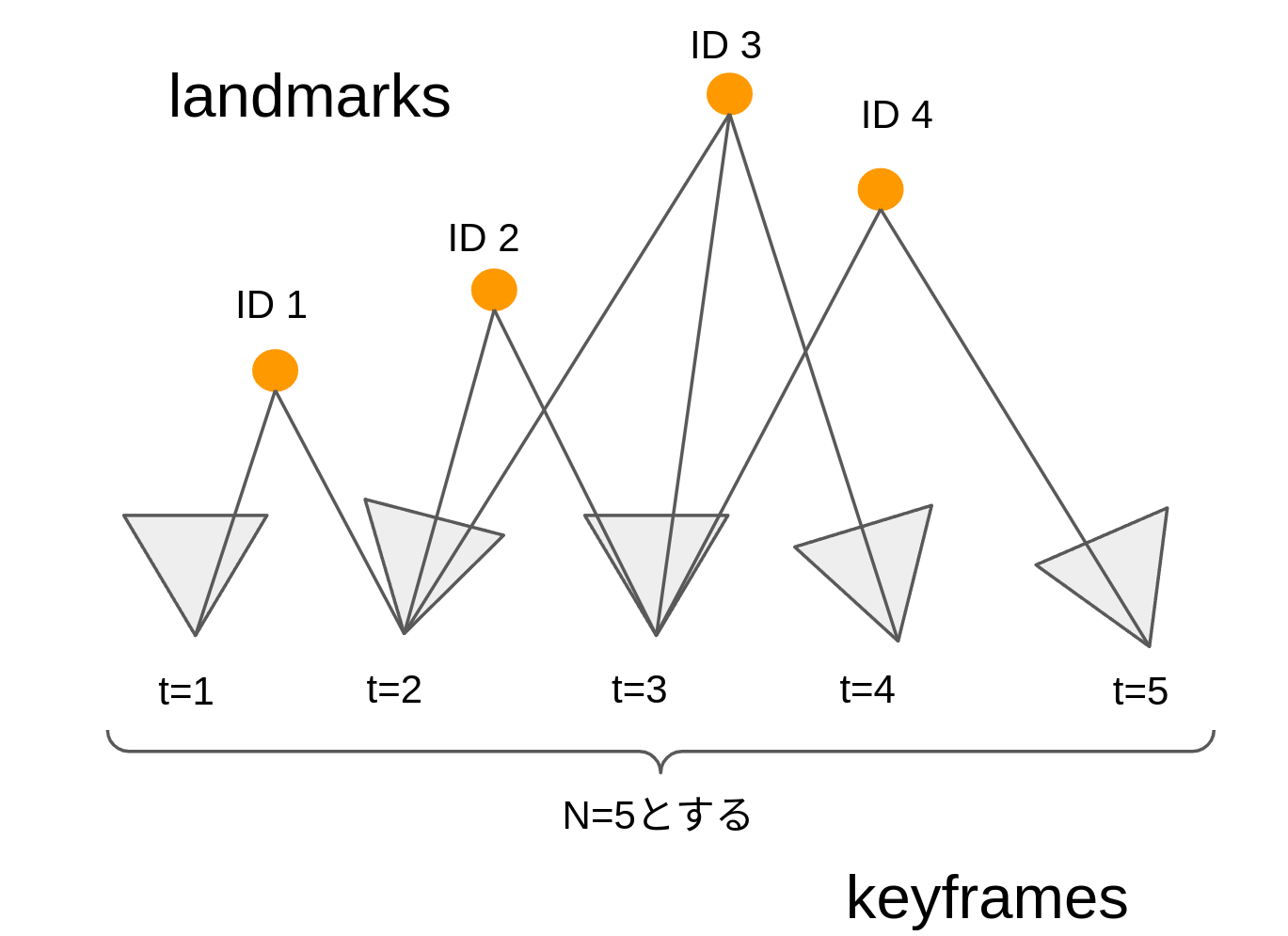
上記以外にも自分の考えとしては、以下のようなことを考えています(下図を参照)。
連続したフレーム間で同一の特徴点を対応付ける場合
t=2, t=3, t=4の連続したフレームにおいて、画像上のID3のランドマークが共通の特徴点だとする。そして、t=2, t=3とt=3, t=4のように、隣り合うフレーム間でのみ対応点の探索は行う。よって、隣り合うフレーム間において、特徴点(画像上のID 3)の対応付けを行い、それらの結果を数珠繋ぎにすることでt=2, t=3, t=4の連続したフレーム間の対応点を得る。
不連続したフレーム間で同一の特徴点を対応付ける場合
ある自然数Nを事前に決定し、現在のフレームの画像からN個前のフレームの画像において総当りで特徴点の対応付けを行う。(例えば、t=5&t=4, t=5&t=4, t=5&t=3, t=5&t=2, t=5&t=1, t=4&t=3....)
質問
バンドル調整で使えるような、複数の画像における共通の特徴点の対応付けを行う方法を教えてもらえないでしょうか。もしくは、opencvやgithubで目的を達成できるようなライブラリや、参考になりそうなオープンソースのコード、質問内容に触れている論文や資料がありましたら教えてもらえないでしょうか。
0 likes
