前回、C++で初めてのパッケージ・プログラムを作りました。
パッケージ名はworksです。
yoshi@yoshi:~/ros2_ws$ tree
.
├── build
├── install
├── log
└── works
├── CMakeLists.txt
├── include
│ └── works
├── package.xml
└── src
└── exec_sample
└── main.c
環境
- Raspberry Pi 5 8GB
- 追加ボード;NVMe Base for Raspberry Pi 5 (NVMe Base by Pimoroni)
- Crucial クルーシャル P2シリーズ 500GB 3D NAND NVMe PCIe M.2 SSD CT500P2SSD8
- 初期;RaspberryPi OS Desktop 64bit (Debian version: 12 (bookworm) Release date: March 15th 2024)
- 現在;Ubuntu Desktop 24.04LTS(64-bit)
- ROS2 HumbleではなくJazzy
Windows10で、検索窓にcmdと入れ、コマンドプロンプトを起動します。
sshでログインします(第1回参照)。必要ならupdateします。
C:\Users\yoshi>ssh yoshi.local
ros2が実行できるようにします。
$ source /opt/ros/jazzy/setup.bash
$ cd ros2_ws
publishするプログラムを作る
works/srcの下に、pubという新しいソースのディレクトリを作り、プログラムpub.cppを保存します。
yoshi@yoshi:~/ros2_ws$ mkdir works/src/pub
yoshi@yoshi:~/ros2_ws$ nano works/src/pub/pub.cpp
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include <stdio.h>
int main(int argc, char **argv)
{
printf("start publish test\n");
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("publisher_yoshi");
auto publisher = node->create_publisher<std_msgs::msg::String>("greeting", 1);
rclcpp::WallRate loop(1);
int count = 0;
while (rclcpp::ok()) {
auto msg = std_msgs::msg::String();
msg.data = "Hello, world " + std::to_string(count++);
publisher->publish(msg);
loop.sleep();
}
rclcpp::shutdown();
return 0;
}
└── works
├── CMakeLists.txt
├── include
│ └── works
├── package.xml
└── src
├── exec_sample
│ └── main.c
└── pub
└── pub.cpp
CMakeLists.txtは、前回のままです。
ビルドします。
yoshi@yoshi:~/ros2_ws$ colcon build
Starting >>> works
Finished <<< works [0.24s]
Summary: 1 package finished [0.38s]
CMakeLists.txtを変更していないので、前回作ったmain.cがビルドされただけですね。
ヘッダー類を追加したときのエラーの問題を解決する
CMakeLists.txtを変更します。次のように、pub.cpp部分を追加します。
add_executable(pub src/pub/pub.cpp)
install(
TARGETS pub
DESTINATION lib/${PROJECT_NAME}
)
ビルドするとエラーが出ました。rclcpp/rclcpp.hppが取り込めなかったようです。
yoshi@yoshi:~/ros2_ws$ colcon build
Starting >>> works
--- stderr: works
/home/yoshi/ros2_ws/works/src/pub/pub.cpp:1:10: fatal error: rclcpp/rclcpp.hpp: No such file or directory
1 | #include "rclcpp/rclcpp.hpp"
| ^~~~~~~~~~~~~~~~~~~
では、パッケージのクリエイトで追加しようとすると、
yoshi@yoshi:~/ros2_ws$ ros2 pkg create --build-type ament_cmake works --dependencies rclcpp rclcpp_components std_msgs
Aborted!
The directory already exists: ./works
Either remove the directory or choose a different destination directory or package name
worksには追加?できなさそうです。まっさらな状態で、上記を実行すると、CMakeLists.txtのなかに、find_package(..が追加されているのがわかりました。ros2をインストールした時点で、それらのヘッダー類はすでに全部が含まれているということのようです。1日費やしてなんとなくわかってきました。
CMakeLists.txtを修正します。ライブラリを使うので探してきてねということを記述します。もともと、find_package(ament_cmake REQUIRED)はありました。そのあとに、今回利用する"rclcpp/rclcpp.hpp"と"std_msgs/msg/string.hpp"のために、なぜか3行追加しています。
なお、 find_package(..した後に、add_executable(..の記述を追加します。順番が逆だとエラーになるようです。
cmake_minimum_required(VERSION 3.8)
project(works)
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(rclcpp_components REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(exec_sample
src/exec_sample/main.c)
install(
TARGETS exec_sample
DESTINATION lib/${PROJECT_NAME}
)
add_executable(pub src/pub/pub.cpp)
ament_target_dependencies(pub rclcpp std_msgs)
install(
TARGETS pub
DESTINATION lib/${PROJECT_NAME}
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
ラズパイのターミナルで、ビルドします(必要ないかも)。
yoshi@yoshi:~/ros2_ws$ colcon build
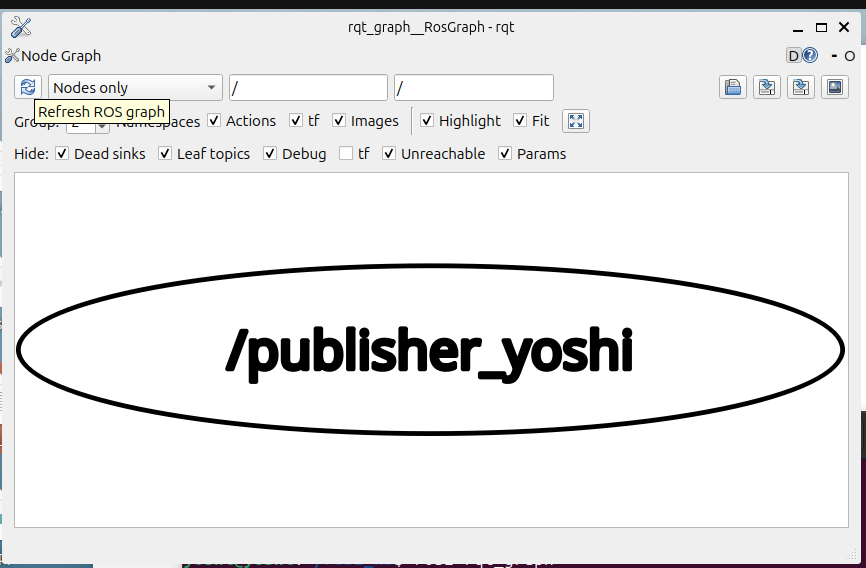
可視化ツールrqt_graphを動かします。
$ source /opt/ros/jazzy/setup.bash
$ rqt_graph
今回作ったプログラムを登録し、起動します。
yoshi@yoshi:~/ros2_ws$ source ~/ros2_ws/install/setup.bash
(省略)
yoshi@yoshi:~/ros2_ws$ ros2 pkg list | grep works
ros_workspace
works
yoshi@yoshi:~/ros2_ws$ ros2 run works pub
start publish test
rqt_graphの左上にあるリフレッシュ・アイコンをクリックしたのが次の画面です。nodeの名称が表示されています。たぶん、publisherが動いているようです。
備忘録 ラズパイ5 ROS2
① ハードの用意とUbuntu Desktop 24.04LTS
② Ubuntu Desktop 24.04LTSでROS2環境 rqt_graphとturtlesim
③ Ubuntu Desktop 24.04LTSでROS2環境 Python その1 responder(セットアップ)
④ Ubuntu Desktop 24.04LTSでROS2環境 Pythonその2responder(コーディングと実行;失敗)
⑤ Ubuntu Desktop 24.04LTSでROS2環境 C++ その1 セットアップ main.c
⑥ Ubuntu Desktop 24.04LTSでROS2環境 C++ その2 セットアップ pub.cpp rqt_graph
⑦ Ubuntu Desktop 24.04LTSでROS2環境 C++ その3 セットアップ sub.cpp rqt_graph
⑧ Ubuntu Desktop 24.04LTSでROS2環境 C++ その4 bme280.cpp 温度