前回、ROS2 Jazzyをインストールしました。
環境
- Raspberry Pi 5 8GB
- 追加ボード;NVMe Base for Raspberry Pi 5 (NVMe Base by Pimoroni)
- Crucial クルーシャル P2シリーズ 500GB 3D NAND NVMe PCIe M.2 SSD CT500P2SSD8
- 初期;RaspberryPi OS Desktop 64bit (Debian version: 12 (bookworm) Release date: March 15th 2024)
- 現在;Ubuntu Desktop 24.04LTS(64-bit)
- ROS2 HumbleではなくJazzy
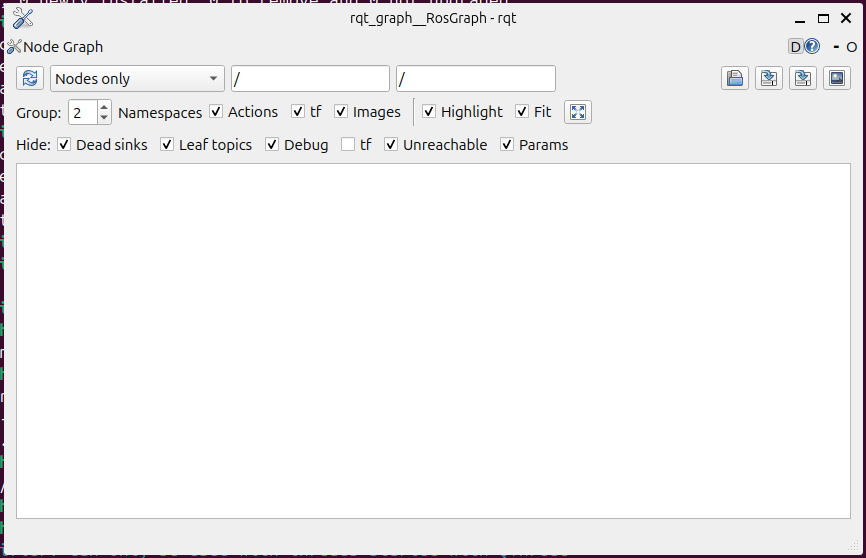
ROSノードとROSトピックの送受信の関係をGUIで図示
ROSには、いくつかのツールがあるので動かします。
Ubuntuマシンのターミナルで実行しています。
仮想Pythonの状態で動かしますが、ここでは、pythonは使っていない。。。
$ source /opt/ros/jazzy/setup.bash
(ros2) yoshi@yoshi:~$ rqt_graph
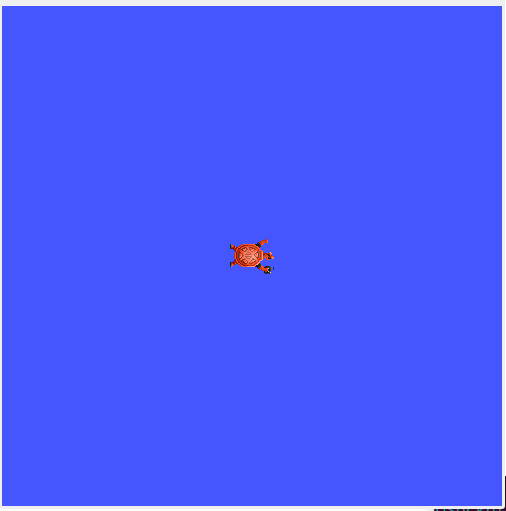
カメのプログラムです。
(ros2) yoshi@yoshi:~$ source /opt/ros/jazzy/setup.bash
(ros2) yoshi@yoshi:~$ ros2 run turtlesim turtlesim_node
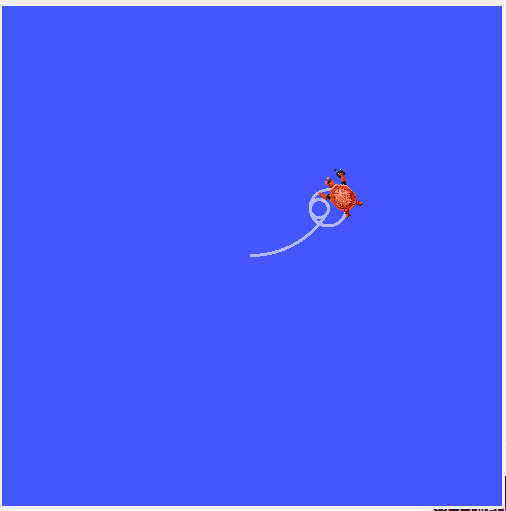
動かしてみます。
(ros2) yoshi@yoshi:~/ros2_ws$ ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 5.0}}"
publisher: beginning loop
publishing #1: geometry_msgs.msg.Twist(linear=geometry_msgs.msg.Vector3(x=2.0, y=0.0, z=0.0), angular=geometry_msgs.msg.Vector3(x=0.0, y=0.0, z=5.0))
何度か動かしました。
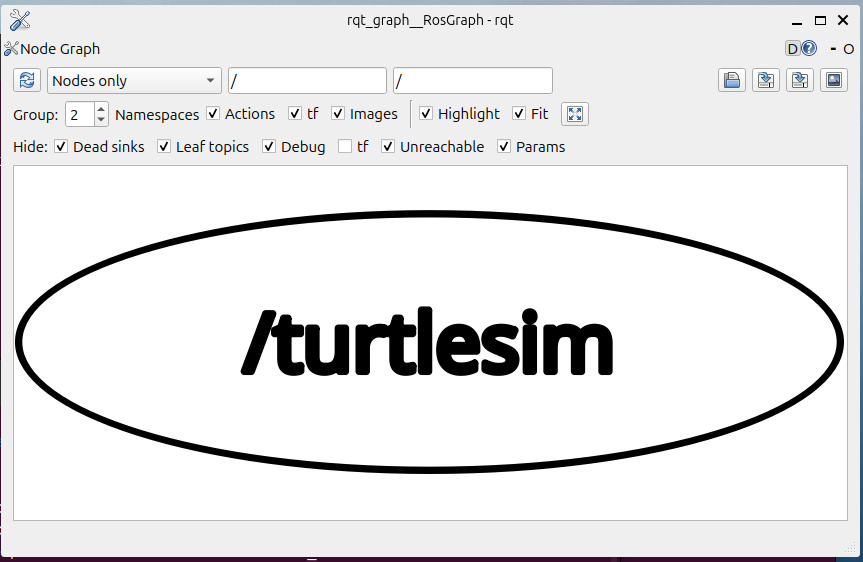
ここで、rqt_graphの左上のリフレッシュ・アイコンをクリックします。
ROSノードのturtlesimが表示されました。たぶん。
キーボードからメッセージを送るパッケージteleop_twist_keyboardはインストールされているようです。
(ros2) yoshi@yoshi:~$ ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r /cmd_vel:=/turtle1/cmd_vel
ここで、rqt_graphの左上のリフレッシュ・アイコンをクリックします。
ROSノードのteleop_twist_keyboardからturtlesimへメッセージが送られている様子が表示されました。たぶん。
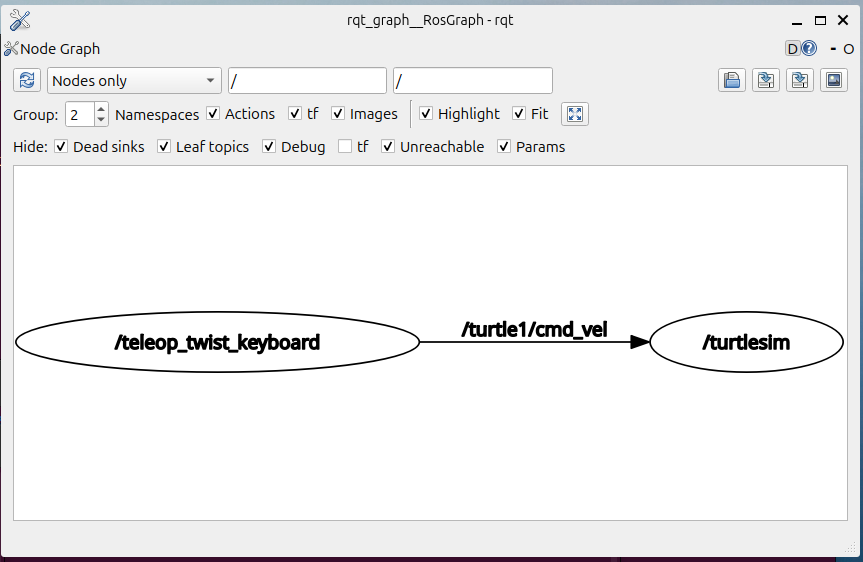
ただ、亀は動いていないように見えます。
備忘録 ラズパイ5 ROS2
① ハードの用意とUbuntu Desktop 24.04LTS
② Ubuntu Desktop 24.04LTSでROS2環境 rqt_graphとturtlesim
③ Ubuntu Desktop 24.04LTSでROS2環境 Python その1 responder(セットアップ)
④ Ubuntu Desktop 24.04LTSでROS2環境 Pythonその2responder(コーディングと実行;失敗)
⑤ Ubuntu Desktop 24.04LTSでROS2環境 C++ その1 セットアップ main.c
⑥ Ubuntu Desktop 24.04LTSでROS2環境 C++ その2 セットアップ pub.cpp rqt_graph