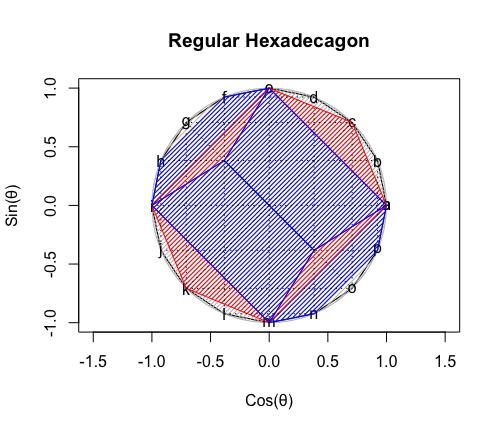
【Rで球面幾何学】正方形における平方対角線(Square diagonal)と立方体における立方対角線(Cubic diagonal)の関係について。
この考え方を応用すると正12面体(Regular Dodecahedron)の作図が可能となります。
正十二面体 - Wikipedia


library(rgl)
# 原蹠(PorTal)
portal_i<-0
portal_j<-0
portal_k<-1
portal_text=paste0("PT(",portal_i,",",portal_j,",",portal_k,")")
# 原蹠表示
texts3d(portal_i,portal_j,portal_k,texts=portal_text,col=rgb(0,0,0),adj=1.0)
# 対蹠(AntiPordal)
antipordal_i<-0
antipordal_j<-0
antipordal_k<--1
antipordal_text=paste0("AP(",antipordal_i,",",antipordal_j,",",antipordal_k,")" main="Cross section for ")
# 対蹠表示
texts3d(antipordal_i,antipordal_j,antipordal_k,texts=antipordal_text,col=rgb(0,0,0),adj=1.0)
# 立方対角線(Cubic Diagonal)
lines3d(c(portal_i,antipordal_i),c(portal_j,antipordal_j),c(portal_k,antipordal_k),col=rgb(1,0,0),lwd=2)
# xy軸上の経度(LoNgitude)座標
# 最初の頂点3個x2
LN01=sin(1/5*pi)
c0<-seq(0,2*pi,length=4)
# 頭蹠側一段目3個
LNa_cos<-cos(c0)*LN01
LNa_sin<-sin(c0)*LN01
# 対蹠側一段目3個
LNd_cos<-cos(c0+pi)*LN01
LNd_sin<-sin(c0+pi)*LN01
# 中央の頂点6個x2
LN10=sin(2/5*pi)
c00<-seq(0,2*pi,length=4)
# 頭蹠側一段目3個
bx00<-cos(c00+pi/2)
by00<-sin(c00+pi/2)
bx01<-cos(c00+pi*2/5+pi/2)
by01<-sin(c00+pi*2/5+pi/2)
bx02<-c(bx00[1],bx01[1],bx00[2],bx01[2],bx00[3],bx01[3],bx00[4])
by02<-c(by00[1],by01[1],by00[2],by01[2],by00[3],by01[3],by00[4])
LNb_cos<-bx02*LN10
LNb_sin<-by02*LN10
# 対蹠側一段目3個
cx00<-cos(c00-pi/2)
cy00<-sin(c00-pi/2)
cx01<-cos(c00+pi*2/5-pi/2)
cy01<-sin(c00+pi*2/5-pi/2)
cx02<-c(cx00[1],cx01[1],cx00[2],cx01[2],cx00[3],cx01[3],cx00[4])
cy02<-c(cy00[1],cy01[1],cy00[2],cy01[2],cy00[3],cy01[3],cy00[4])
LNc_cos<-cx02*LN10
LNc_sin<-cy02*LN10
# 立方体におけるz軸上の緯度(LaTitude)座標
LTa=4/5
LTb=2/5
LTc=-2/5
LTd=-4/5
# 正12面体描写(原蹠から最初の隣点3個へ)
lines3d(c(portal_i,LNa_cos[1]),c(portal_j,LNa_sin[1]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
lines3d(c(portal_i,LNa_cos[2]),c(portal_j,LNa_sin[2]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
lines3d(c(portal_i,LNa_cos[3]),c(portal_j,LNa_sin[3]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠から最初の隣点3個へ)
lines3d(c(antipordal_i,LNd_cos[1]),c(antipordal_j,LNd_sin[1]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
lines3d(c(antipordal_i,LNd_cos[2]),c(antipordal_j,LNd_sin[2]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
lines3d(c(antipordal_i,LNd_cos[3]),c(antipordal_j,LNd_sin[3]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの最初の隣点3個から次の隣点6個へ)
lines3d(c(LNa_cos[1],LNb_cos[5]),c(LNa_sin[1],LNb_sin[5]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[1],LNb_cos[6]),c(LNa_sin[1],LNb_sin[6]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[2],LNb_cos[1]),c(LNa_sin[2],LNb_sin[1]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[2],LNb_cos[2]),c(LNa_sin[2],LNb_sin[2]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[3],LNb_cos[3]),c(LNa_sin[3],LNb_sin[3]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[3],LNb_cos[4]),c(LNa_sin[3],LNb_sin[4]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの次の隣点6個からの水平線3本)
lines3d(c(LNb_cos[2],LNb_cos[3]),c(LNb_sin[2],LNb_sin[3]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[4],LNb_cos[5]),c(LNb_sin[4],LNb_sin[5]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[6],LNb_cos[1]),c(LNb_sin[6],LNb_sin[1]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠からの最初の隣点3個から次の隣点6個へ)
lines3d(c(LNd_cos[1],LNc_cos[5]),c(LNd_sin[1],LNc_sin[5]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[1],LNc_cos[6]),c(LNd_sin[1],LNc_sin[6]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[2],LNc_cos[1]),c(LNd_sin[2],LNc_sin[1]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[2],LNc_cos[2]),c(LNd_sin[2],LNc_sin[2]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[3],LNc_cos[3]),c(LNd_sin[3],LNc_sin[3]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[3],LNc_cos[4]),c(LNd_sin[3],LNc_sin[4]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠からの次の隣点6個からの水平線3本)
lines3d(c(LNc_cos[2],LNc_cos[3]),c(LNc_sin[2],LNc_sin[3]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNc_cos[4],LNc_cos[5]),c(LNc_sin[4],LNc_sin[5]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNc_cos[6],LNc_cos[1]),c(LNc_sin[6],LNc_sin[1]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの経路と対蹠からの経路の結合線6本)
lines3d(c(LNb_cos[1],LNc_cos[4]),c(LNb_sin[1],LNc_sin[4]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[2],LNc_cos[5]),c(LNb_sin[2],LNc_sin[5]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[3],LNc_cos[6]),c(LNb_sin[3],LNc_sin[6]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[4],LNc_cos[1]),c(LNb_sin[4],LNc_sin[1]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[5],LNc_cos[2]),c(LNb_sin[5],LNc_sin[2]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[6],LNc_cos[3]),c(LNb_sin[6],LNc_sin[3]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
# アニメーション
movie3d(spin3d(axis=c(0,0,1),rpm=5),duration=10,fps=25,movie="~/Desktop/dodecahedron051")
ちなみ正十二面体には立方体角線=対蹠のセットが他に9個あり、どれを選んでも同じ結果となります。
 )
)
library(rgl)
# 原蹠(PorTal)
portal_i<-0
portal_j<-0
portal_k<-1
portal_text=paste0("PT(",portal_i,",",portal_j,",",portal_k,")")
# 原蹠表示
texts3d(portal_i,portal_j,portal_k,texts=portal_text,col=rgb(0,0,0),adj=1.0)
# 対蹠(AntiPordal)
antipordal_i<-0
antipordal_j<-0
antipordal_k<--1
antipordal_text=paste0("AP(",antipordal_i,",",antipordal_j,",",antipordal_k,")" main="Cross section for ")
# 対蹠表示
texts3d(antipordal_i,antipordal_j,antipordal_k,texts=antipordal_text,col=rgb(0,0,0),adj=1.0)
# 立方対角線(Cubic Diagonal)
lines3d(c(portal_i,antipordal_i),c(portal_j,antipordal_j),c(portal_k,antipordal_k),col=rgb(1,0,0),lwd=2)
# xy軸上の経度(LoNgitude)座標
# 最初の頂点3個x2
LN01=sin(1/5*pi)
c0<-seq(0,2*pi,length=4)
# 頭蹠側一段目3個
LNa_cos<-cos(c0)*LN01
LNa_sin<-sin(c0)*LN01
# 対蹠側一段目3個
LNd_cos<-cos(c0+pi)*LN01
LNd_sin<-sin(c0+pi)*LN01
# 中央の頂点6個x2
LN10=sin(2/5*pi)
c00<-seq(0,2*pi,length=4)
# 頭蹠側一段目3個
bx00<-cos(c00+pi/2)
by00<-sin(c00+pi/2)
bx01<-cos(c00+pi*2/5+pi/2)
by01<-sin(c00+pi*2/5+pi/2)
bx02<-c(bx00[1],bx01[1],bx00[2],bx01[2],bx00[3],bx01[3],bx00[4])
by02<-c(by00[1],by01[1],by00[2],by01[2],by00[3],by01[3],by00[4])
LNb_cos<-bx02*LN10
LNb_sin<-by02*LN10
# 対蹠側一段目3個
cx00<-cos(c00-pi/2)
cy00<-sin(c00-pi/2)
cx01<-cos(c00+pi*2/5-pi/2)
cy01<-sin(c00+pi*2/5-pi/2)
cx02<-c(cx00[1],cx01[1],cx00[2],cx01[2],cx00[3],cx01[3],cx00[4])
cy02<-c(cy00[1],cy01[1],cy00[2],cy01[2],cy00[3],cy01[3],cy00[4])
LNc_cos<-cx02*LN10
LNc_sin<-cy02*LN10
# 立方体におけるz軸上の緯度(LaTitude)座標
LTa=4/5
LTb=2/5
LTc=-2/5
LTd=-4/5
# 正12面体描写(原蹠から最初の隣点3個へ)
lines3d(c(portal_i,LNa_cos[1]),c(portal_j,LNa_sin[1]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
lines3d(c(portal_i,LNa_cos[2]),c(portal_j,LNa_sin[2]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
lines3d(c(portal_i,LNa_cos[3]),c(portal_j,LNa_sin[3]),c(portal_k,LTa),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠から最初の隣点3個へ)
lines3d(c(antipordal_i,LNd_cos[1]),c(antipordal_j,LNd_sin[1]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
lines3d(c(antipordal_i,LNd_cos[2]),c(antipordal_j,LNd_sin[2]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
lines3d(c(antipordal_i,LNd_cos[3]),c(antipordal_j,LNd_sin[3]),c(antipordal_k,LTd),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの最初の隣点3個から次の隣点6個へ)
lines3d(c(LNa_cos[1],LNb_cos[5]),c(LNa_sin[1],LNb_sin[5]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[1],LNb_cos[6]),c(LNa_sin[1],LNb_sin[6]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[2],LNb_cos[1]),c(LNa_sin[2],LNb_sin[1]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[2],LNb_cos[2]),c(LNa_sin[2],LNb_sin[2]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[3],LNb_cos[3]),c(LNa_sin[3],LNb_sin[3]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNa_cos[3],LNb_cos[4]),c(LNa_sin[3],LNb_sin[4]),c(LTa,LTb),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの次の隣点6個からの水平線3本)
lines3d(c(LNb_cos[2],LNb_cos[3]),c(LNb_sin[2],LNb_sin[3]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[4],LNb_cos[5]),c(LNb_sin[4],LNb_sin[5]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[6],LNb_cos[1]),c(LNb_sin[6],LNb_sin[1]),c(LTb,LTb),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠からの最初の隣点3個から次の隣点6個へ)
lines3d(c(LNd_cos[1],LNc_cos[5]),c(LNd_sin[1],LNc_sin[5]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[1],LNc_cos[6]),c(LNd_sin[1],LNc_sin[6]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[2],LNc_cos[1]),c(LNd_sin[2],LNc_sin[1]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[2],LNc_cos[2]),c(LNd_sin[2],LNc_sin[2]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[3],LNc_cos[3]),c(LNd_sin[3],LNc_sin[3]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNd_cos[3],LNc_cos[4]),c(LNd_sin[3],LNc_sin[4]),c(LTd,LTc),col=rgb(0,0,0),lwd=1)
# 正12面体描写(対蹠からの次の隣点6個からの水平線3本)
lines3d(c(LNc_cos[2],LNc_cos[3]),c(LNc_sin[2],LNc_sin[3]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNc_cos[4],LNc_cos[5]),c(LNc_sin[4],LNc_sin[5]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNc_cos[6],LNc_cos[1]),c(LNc_sin[6],LNc_sin[1]),c(LTc,LTc),col=rgb(0,0,0),lwd=1)
# 正12面体描写(原蹠からの経路と対蹠からの経路の結合線6本)
lines3d(c(LNb_cos[1],LNc_cos[4]),c(LNb_sin[1],LNc_sin[4]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[2],LNc_cos[5]),c(LNb_sin[2],LNc_sin[5]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[3],LNc_cos[6]),c(LNb_sin[3],LNc_sin[6]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[4],LNc_cos[1]),c(LNb_sin[4],LNc_sin[1]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[5],LNc_cos[2]),c(LNb_sin[5],LNc_sin[2]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
lines3d(c(LNb_cos[6],LNc_cos[3]),c(LNb_sin[6],LNc_sin[3]),c(LTb,LTc),col=rgb(0,0,0),lwd=1)
# 追加立方体角線
lines3d(c(LNa_cos[1],LNd_cos[1]),c(LNa_sin[1],LNd_sin[1]),c(LTa,LTd),col=rgb(0,1,0),lwd=1)
lines3d(c(LNa_cos[2],LNd_cos[2]),c(LNa_sin[2],LNd_sin[2]),c(LTa,LTd),col=rgb(0,1,0),lwd=1)
lines3d(c(LNa_cos[3],LNd_cos[3]),c(LNa_sin[3],LNd_sin[3]),c(LTa,LTd),col=rgb(0,1,0),lwd=1)
lines3d(c(LNb_cos[1],LNc_cos[1]),c(LNb_sin[1],LNc_sin[1]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
lines3d(c(LNb_cos[2],LNc_cos[2]),c(LNb_sin[2],LNc_sin[2]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
lines3d(c(LNb_cos[3],LNc_cos[3]),c(LNb_sin[3],LNc_sin[3]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
lines3d(c(LNb_cos[4],LNc_cos[4]),c(LNb_sin[4],LNc_sin[4]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
lines3d(c(LNb_cos[5],LNc_cos[5]),c(LNb_sin[5],LNc_sin[5]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
lines3d(c(LNb_cos[6],LNc_cos[6]),c(LNb_sin[6],LNc_sin[6]),c(LTb,LTc),col=rgb(0,0,1),lwd=1)
# アニメーション
movie3d(spin3d(axis=c(0,0,1),rpm=5),duration=10,fps=25,movie="~/Desktop/dodecahedron002")
双対(Duality)…(それぞれ三方向に伸びる)頂点と(それぞれ五角形を成す)面の関係を入れ替えると正二十面体(Regular Icosahedron)になります。
【Rで球面幾何学】正20面体(Regular Icosahedron)の作図について。

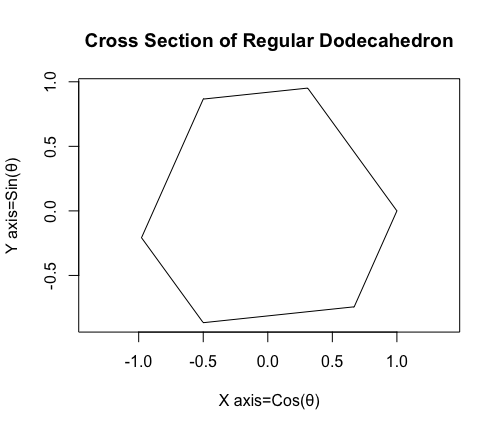
ところで作図上の鍵となるのが、以下の断面(Cross Section)の算出過程。
c0<-seq(0,2*pi,length=4)
cx0<-cos(c0)
cy0<-sin(c0)
cx1<-cos(c0+pi*2/5)
cy1<-sin(c0+pi*2/5)
cx2<-c(cx0[1],cx1[1],cx0[2],cx1[2],cx0[3],cx1[3],cx0[4])
cy2<-c(cy0[1],cy1[1],cy0[2],cy1[2],cy0[3],cy1[3],cy0[4])
plot(cx2,cy2,asp=1,type="l"main="Cross Section of Regular Dodecahedron",xlab="X axis=Cos(θ)",ylab="Y axis=Sin(θ)")
- まずはガウスの発見した「1の1の冪根の巡回性」に基づいて正三角形を算出。
- さらにこれと36度(π/5ラジアン)位相のズレた正三角形を算出して座標をマージする。
背景により深淵な数理が潜んでいる気もしますが、とりあえず以下続報…ちなみに立方体からの屋根掛け法についてはこちら。
【Rで球面幾何学】正六面体と正十二面体の間の往復(「屋根掛け法」とは何か?)