目的
Python Controlで、1自由度系(バネマスダンバ系)の伝達関数の任意の正弦波に対する応答を求める。
事前準備
システムのモデル化
以下の伝達関数について考える。
G(s)=\frac{Y(s)}{U(s)}=\frac{1}{ms^2+cs+k}
m:質量[kg]
k:ばね定数[N/m]
c:粘性減衰係数[N・s/m]
f:力[N]
Python Controlでの任意入力応答
Python Controlは任意の入力に対する応答は以下の関数で求めることができる。
control.matlab.lsim(sys, U=0.0, T=None, X0=0.0)
- Parameters:
- sys:LTIシステム(線型時不変システム)の状態空間or伝達関数
- U:各時刻での入力配列(デフォルト= 0)。UがNoneまたは0の場合、特殊なアルゴリズムが使用されます。この特別なアルゴリズムは、他の方法で使用される一般的なアルゴリズムより高速です。
- T:時刻配列。数値は単調増加しなければなりません。
- X0: 初期値(default=0)、数値は配列に自動変換。
control.matlab.lsimは線形システムの任意の応答を求めることができる。
パラメータU、X0の便宜として、数値(スカラー)は正しい形状の行列に変換されます。
正しい行列は、引数sysとTから推測されます。
引用元:
control.matlab.lsim
正弦波
正弦波は、numpyの関数を使用して、以下の関数で生成できる。
u = ampnp.sin(2np.pifreqt)
- Parameters
- np.pi:円周率
- freq:正弦波の周波数
- t:時刻配列
サンプルコード
responce_lsim_sincurve.py
# !/usr/bin/env python
from control.matlab import *
from matplotlib import pyplot as plt
from scipy import arange
import numpy as np
def main():
k=1.0
m=0.1
c=0.1
num = [0, 0,1]
den = [m, c, k]
x0 = [0, 0]
t =np.linspace(0, 10, 1024)
freq=1.0
amp=1.0
u = amp*np.sin(2*np.pi*freq*t)
sys1 = tf(num, den)
print sys1
(y1a, T1a, x1a )= lsim(sys1, U=u, T=t, X0=x0)
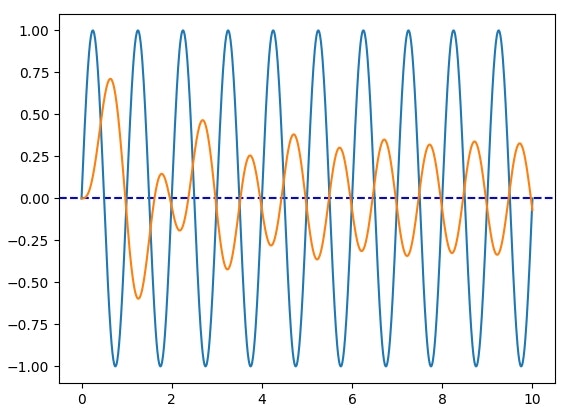
plt.axhline(0, color="b", linestyle="--")
plt.plot(T1a, u, label="$X_2$")
# plt.plot(T1a, x1a[:,1], label="$X_1$")
# plt.plot(T1a, x1a[:,0], label="$X_2$")
plt.plot(T1a, y1a, label="Output")
plt.show()
if __name__ == "__main__":
main()
サンプルコードは以下に格納。
https://github.com/nnn112358/python-control_test