SDOでオブジェクト・ディクショナリの項目を読み出すプログラムを作ります。
NMTとStatus Machineはどこで使われているのか
EPOS Command Library Documentationの中に、NMT関連の関数を探します。一つ見つかりました。
- VCS_SendNMTService
| 状態 | パラメタ | 内容 |
|---|---|---|
| Start remote node | 1 | NCS_START_REMOTE_NODE |
| Stop remote node | 2 | NCS_STOP_REMOTE_NODE |
| Enter pre-operational | 128 | NCS_ENTER_PRE_OPERATIONAL |
| Reset node | 129 | NCS_RESET_NODE |
| Reset communication | 130 | NCS_RESET_COMMUNICATION |
サンプル・プログラムHelloEposCmdで検索しましたが、使われていないようです。
Status Machine関連の関数を探します。
- VCS_ResetDevice
- VCS_SetState
| 状態 | パラメタ | 内容 |
|---|---|---|
| Get/Set Disable State | 0x0000 | ST_DISABLED |
| Get/Set Enable State | 0x0001 | ST_ENABLED |
| Get/Set Quickstop State | 0x0002 | ST_QUICKSTOP |
| Get Fault State | 0x0003 | ST_FAULT |
- VCS_SetEnableState
- VCS_SetDisableState
- VCS_SetQuickStopState
- VCS_ClearFault
- VCS_GetState
- VCS_GetEnableState
- VCS_GetDisableState
- VCS_GetQuickStopState
- VCS_GetFaultState
サンプル・プログラムHelloEposCmdで検索すると、次の関数が使われていることがわかりました。
VCS_SetEnableState
VCS_SetDisableState
VCS_ClearFault
VCS_GetEnableState
VCS_GetFaultState
プログラムの実行
worksディレクトリで作業をしています。USBケーブルは2本とも抜いておきます。
cd works
ls

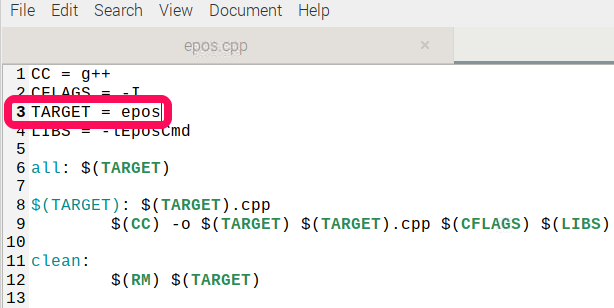
includeするのはDefinitions.hです。VCS_xxx関数が初期化されています。プログラム名をepos.cppにしました。makeするためのMakefileをテキスト・エディタで編集します。TRAGETのところをTARGET = eposに変更します。
makeし、./eposで実行します。

epos.cppのnodeIdを6に変更し、make、./eposで実行します。
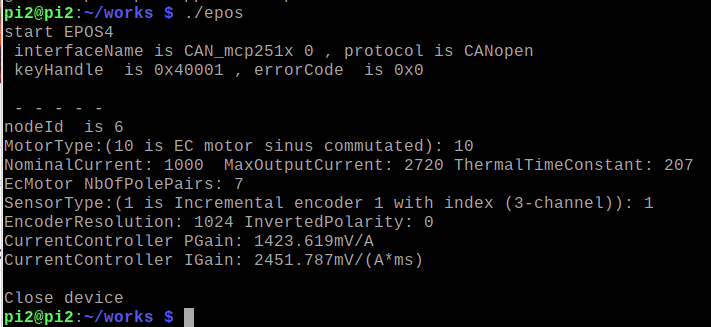
最後の2行のPI制御の値が微妙に異なっています。モータの特性の違いかもしれません。
プログラム①
VCS_OpenDevice()を起動してエラーがなかった時点で、NMTはInitialization状態からPre-operational状態をへて、Operational状態に移行していると思われます。しかし、ライブラリの中に、NMT状態を表示する関数が見つかっていません。
SDOで読み出すとき、Pre-operational状態でもできたと思いますが、確認はできていません。
コメントアウトしていますが、VCS_SendNMTService()のRESET_COMMUNICATIONは、CANバスでほかのデバイスが起こしたエラーなどをリセットします。このEPOS4が2台の構成では、そういう事態は起こらないかもしれません。
Status Machineの状態も、Operation enabled状態になっているものと想像します。VCS_ClearFault()を念のために実行しています。このままだとOperation enabled状態に遷移していないと思いますが、SDOの読み出しはできています。
読み出しが終わったら、VCS_SetQuickStopState()でSwitch on disabled状態に遷移させたうえで、最終処理のVCS_CloseDevice()を実行させています。VCS_CloseDevice()だけだと、EPOS4のLEDのエラー表示が止まらなかったことがあるためです。
Status Machineの状態は、getXXXState()が充実しているので、今の状態を確認しながら何かを実行するというプログラミング・スタイルがベターだと言えます。
#include <stdlib.h>
#include <iostream>
#include "Definitions.h"
void* keyHandle = 0;
char* deviceName = (char*)"EPOS4";
char* protocolStackName = (char*)"CANopen";
char* interfaceName = (char*)"CAN_mcp251x 0";
char* portName = (char*)"CAN0";
uint32_t errorCode = 0;
uint32_t timeout = 0;
uint16_t nodeId = 6;
uint16_t MotorType = 0;
uint32_t NominalCurrent = 0;
uint32_t MaxOutputCurrent = 0;
uint16_t ThermalTimeConstant = 0;
uint8_t NbOfPolePairs = 0;
uint16_t SensorType = 0;
uint32_t EncoderResolution = 0;
int32_t InvertedPolarity = 0;
uint16_t EController = 1; // PI current controller
uint16_t EGain = 1; // 1:Current controller P gain, 2:Current controller I gain
uint64_t Value = 0;
int main(){
printf("start EPOS4\n");
printf(" interfaceName is %s , protocol is %s\n", interfaceName,protocolStackName);
keyHandle = VCS_OpenDevice(deviceName, protocolStackName, interfaceName, portName, &errorCode);
printf(" keyHandle is 0x%x , errorCode is 0x%x\n", keyHandle,errorCode);
//VCS_SendNMTService(keyHandle, nodeId, 130, &errorCode); // RESET_COMMUNICATION
VCS_ClearFault(keyHandle, nodeId, &errorCode); // ClearFault
printf("\n - - - - - \n");
if (keyHandle!=0 && errorCode == 0) {
VCS_Store(keyHandle, nodeId, &errorCode);
printf("nodeId is %d\n", nodeId);
VCS_GetMotorType(keyHandle, nodeId, &MotorType, &errorCode);
printf("MotorType:(10 is EC motor sinus commutated): %d\n", MotorType);
VCS_GetDcMotorParameterEx(keyHandle, nodeId, &NominalCurrent, &MaxOutputCurrent, &ThermalTimeConstant, &errorCode);
printf("NominalCurrent: %d MaxOutputCurrent: %d ThermalTimeConstant: %d\n", NominalCurrent, MaxOutputCurrent, ThermalTimeConstant);
VCS_GetEcMotorParameterEx(keyHandle, nodeId, &NominalCurrent, &MaxOutputCurrent, &ThermalTimeConstant, &NbOfPolePairs, &errorCode);
printf("EcMotor NbOfPolePairs: %d\n", NbOfPolePairs);
VCS_GetSensorType(keyHandle, nodeId, &SensorType, &errorCode);
printf("SensorType:(1 is Incremental encoder 1 with index (3-channel)): %d\n", SensorType);
VCS_GetIncEncoderParameter(keyHandle, nodeId, &EncoderResolution, &InvertedPolarity, &errorCode);
printf("EncoderResolution: %d InvertedPolarity: %d\n", EncoderResolution, InvertedPolarity);
VCS_GetControllerGain(keyHandle, nodeId, EController, 1, &Value, &errorCode);
printf("CurrentController PGain: %.3fmV/A\n", Value / 1000.0);
VCS_GetControllerGain(keyHandle, nodeId, EController, 2, &Value, &errorCode);
printf("CurrentController IGain: %.3fmV/(A*ms)\n", Value / 1000.0);
}
VCS_SetQuickStopState(keyHandle, nodeId, &errorCode); // Quick stop state
//VCS_SendNMTService(keyHandle, nodeId, 130, &errorCode); // RESET_COMMUNICATION
VCS_CloseDevice(keyHandle, &errorCode);
printf("\nClose device\n");
}
プログラム②
VCS_OpenDevice()の引数がchar*になっています。サンプル・プログラムHelloEposCmdのように、もともとの文字列をstring型にして、char*に変換する形に変更したプログラムです。
#include <stdlib.h>
#include <iostream>
#include "Definitions.h"
#include <string>
#include <cstring>
using namespace std;
void* keyHandle = 0;
string g_deviceName = "EPOS4";
string g_protocolStackName = "CANopen";
string g_interfaceName = "CAN_mcp251x 0";
string g_portName = "CAN0";
uint32_t errorCode = 0;
uint32_t timeout = 0;
uint16_t nodeId = 6;
uint16_t MotorType = 0;
uint32_t NominalCurrent = 0;
uint32_t MaxOutputCurrent = 0;
uint16_t ThermalTimeConstant = 0;
uint8_t NbOfPolePairs = 0;
uint16_t SensorType = 0;
uint32_t EncoderResolution = 0;
int32_t InvertedPolarity = 0;
uint16_t EController = 1; // PI current controller
uint16_t EGain = 1; // 1:Current controller P gain, 2:Current controller I gain
uint64_t Value = 0;
int main(){
printf("start EPOS4\n");
char* pDeviceName = new char[255]; // メモリ確保
char* pProtocolStackName = new char[255];
char* pInterfaceName = new char[255];
char* pPortName = new char[255];
strcpy(pDeviceName, g_deviceName.c_str()); // コピー
strcpy(pProtocolStackName, g_protocolStackName.c_str());
strcpy(pInterfaceName, g_interfaceName.c_str());
strcpy(pPortName, g_portName.c_str());
printf(" interfaceName is %s , protocol is %s\n", pInterfaceName, pProtocolStackName);
keyHandle = VCS_OpenDevice(pDeviceName, pProtocolStackName, pInterfaceName, pPortName, &errorCode);
printf(" keyHandle is 0x%x , errorCode is 0x%x\n", keyHandle,errorCode);
//VCS_SendNMTService(keyHandle, nodeId, 130, &errorCode); // RESET_COMMUNICATION
VCS_ClearFault(keyHandle, nodeId, &errorCode); // ClearFault
printf("\n - - - - - \n");
if (keyHandle!=0 && errorCode == 0) {
VCS_Store(keyHandle, nodeId, &errorCode);
printf("nodeId is %d\n", nodeId);
VCS_GetMotorType(keyHandle, nodeId, &MotorType, &errorCode);
printf("MotorType:(10 is EC motor sinus commutated): %d\n", MotorType);
VCS_GetDcMotorParameterEx(keyHandle, nodeId, &NominalCurrent, &MaxOutputCurrent, &ThermalTimeConstant, &errorCode);
printf("NominalCurrent: %d MaxOutputCurrent: %d ThermalTimeConstant: %d\n", NominalCurrent, MaxOutputCurrent, ThermalTimeConstant);
VCS_GetEcMotorParameterEx(keyHandle, nodeId, &NominalCurrent, &MaxOutputCurrent, &ThermalTimeConstant, &NbOfPolePairs, &errorCode);
printf("EcMotor NbOfPolePairs: %d\n", NbOfPolePairs);
VCS_GetSensorType(keyHandle, nodeId, &SensorType, &errorCode);
printf("SensorType:(1 is Incremental encoder 1 with index (3-channel)): %d\n", SensorType);
VCS_GetIncEncoderParameter(keyHandle, nodeId, &EncoderResolution, &InvertedPolarity, &errorCode);
printf("EncoderResolution: %d InvertedPolarity: %d\n", EncoderResolution, InvertedPolarity);
VCS_GetControllerGain(keyHandle, nodeId, EController, 1, &Value, &errorCode);
printf("CurrentController PGain: %.3fmV/A\n", Value / 1000.0);
VCS_GetControllerGain(keyHandle, nodeId, EController, 2, &Value, &errorCode);
printf("CurrentController IGain: %.3fmV/(A*ms)\n", Value / 1000.0);
}
delete []pDeviceName; // メモリ解放
delete []pProtocolStackName;
delete []pInterfaceName;
delete []pPortName;
VCS_SetQuickStopState(keyHandle, nodeId, &errorCode); // Quick stop state
//VCS_SendNMTService(keyHandle, nodeId, 130, &errorCode); // RESET_COMMUNICATION
VCS_CloseDevice(keyHandle, &errorCode);
printf("\nClose device\n");
}
目次
- ① ラズパイ+EPOS4、C++でプログラミング<準備>
- ② ラズパイ+EPOS4、C++でプログラミング<車体の用意>
- ③ ラズパイ+EPOS4、C++でプログラミング<モータのチューニング>
- ④ ラズパイ+EPOS4、C++でプログラミング<モータのチューニング2>
- ⑤ ラズパイ+EPOS4、C++でプログラミング<ライブラリの準備>
- ⑥ ラズパイ+EPOS4、C++でプログラミング<オブジェクト・ディクショナリを読み出す>
- ⑦ ラズパイ+EPOS4、C++でプログラミング<モータの回転 PPM>
- ⑧ ラズパイ+EPOS4、C++でプログラミング<モータの回転 CSP その1>ベータ版
- ⑨ ラズパイ+EPOS4、C++でプログラミング<モータの回転 CSP その2>ベータ版