目次
| 記事 | 概要 |
|---|---|
| 01.概要 | @mobi Open Trial Kit 1.0とは |
| 02.フレーム組み立て | フレーム部分の組み立て |
| 03.車輪取り付け | 車輪を本体に取り付けるところまで |
| 04.スイッチとバッテリー | スイッチ類(背面パネル)とバッテリー設置まで <- 本記事はここ |
| 05.センサ取り付け | IMU、LiDAR、DC-DCコンバータ、端子台取り付けまで |
| 06.完成 | モータドライバ、残りの配線、天板取り付けまで(ハードウェア完成) |
| 07.動作確認 | ソフトウェアセットアップ、@mobi動作確認まで |
組み立て
CAD
前回、

まで組みあがったはずです。
今回はスイッチやバッテリーをつけていきたいと思います。ここから圧着や半田付けなどの配線作業もしていきますので圧着工具なども合わせて用意しておいてください。
後ろがこんな感じだったのが。。。

こんな感じになる予定です。空いている四角い穴のところにはLEDデジタル電圧計もつけていきます。

回路図は以下です。配線する際はこちらを参照してください。

スイッチ類の配線作成
スイッチたちを取り付けていくスイッチパネル(MVSHM-AS03002-3Y5-72S4S)はこちらです。

左から順に、充電コネクタ(NL4MP-ST)、非常停止ボタン(AB6E-3BV01PRH)、照光押ボタンスイッチ(AL6H-A14PG)です。

照光押ボタンスイッチ
まずは照光押ボタンスイッチです。私たちは実験室にあった緑色のケーブルを使っていきます。皆さんも400 mm程度の線を4本用意してください。

今回は照光押ボタンスイッチを押下したときに導通するようにします。そのため、NO (ノーマルオープン)とC (コモン)を使用します。NC (ノーマルクローズ)は使用しません。照光させるため、LEDの+と-にも線を付けておきます。4本とも、照光押ボタンスイッチと心線を半田付けしてください。
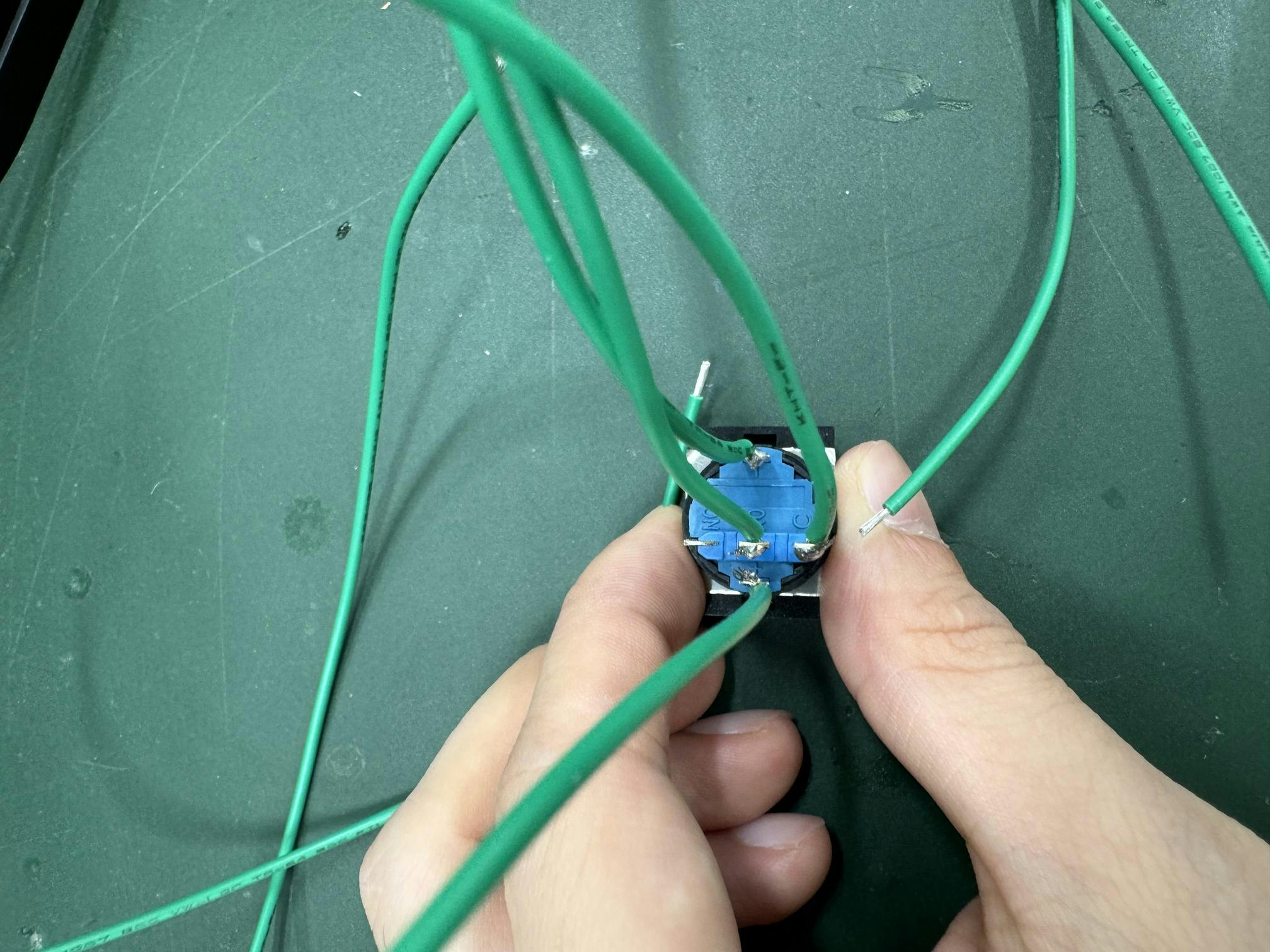
出来上がるとこんな感じです。

非常停止ボタン
まずは非常停止ボタンの配線を作りましょう。モータドライバ2つに信号を伝えるため、片方は二股に分けます。ので、短い線×3本と長い線×1本が必要です。

長い線が400 mmくらい、短い線はその半分の長さくらいにしてみました。余裕をもって作成し、諸々固定したあとに長かったら切っていく想定です。

非常停止ボタンの端子の穴に被膜を剥いた心線を絡めていきます。被膜はワイヤストリッパで剥いてください。また、ほど良い径の熱収縮チューブも用意してください。

非常停止ボタンの端子と心線を半田付けします。

二股に分ける部分はこのように、半田で心線3つを固定します。あまり半田を盛ると熱収縮チューブが入らなくなるのでほどほどにつけてください。

長い方の心線を先ほどと同様に非常停止ボタンに半田付けします。

こんな感じになっていたらOKです。

スイッチパネルへの固定
配線はできたので、次はスイッチパネルに付けていきます。
LEDデジタル電圧計
まずは簡単なLEDデジタル電圧計から付けていきましょう。

配線は最初からついていますし、はめるだけでカチッと音が鳴れば固定されます。


照光押ボタンスイッチ
次は照光押ボタンスイッチを取り付けます。ナット類を2つ取り外してください。黒い方は回すと取れます。金属の方は黒い方が取れると取れます。一番奥の小さな黒いひらひらのものは取らなくてよいです。(スイッチパネルとの緩衝材の役割)

そして、照光押ボタンスイッチ用の蓋をつけてください。

つけるとこんな感じです。


照光押ボタンスイッチをこの穴につけていきます。


入れた後、反対側から先ほど取り外したナット類を金属、黒、の順で付けていきます。金属の方は尖っている方をスイッチパネルに向けて固定してください。ナット類をきちんと締めたらOKです。

今回はこちらの向きで取り付けました。蓋はロボットを地面に置いた時に下から上へ開けるようにしています。

非常停止ボタン
続いて非常停止ボタンを固定していきます。照光押ボタンスイッチ同様、固定するためのナット類?を外してください。同時に、穴への干渉を防ぐため、非常停止ボタンの突起も除去してください。今回はニッパーで切断しました。

その後、薄い方を押下できるボタン側に入れた上でスイッチパネルの穴にはめ、ナットのように回せる方を配線が延びている側に取り付けてください。ナットの方を回して固定できればOKです。

3つともついたらこんな感じになっていると思います。

裏側はこんな感じ。

充電コネクタ
次は充電コネクタ(NL4MP-ST)を付けていきます。スイッチパネルにつけるのはこれが最後です。スペーサーの役割で3Dプリンタで出力したコネクタスペーサも使います。

3Dプリンタパーツに穴が合うように充電コネクタを差し込みます。

横から見るとこんな感じ。

スイッチパネルの穴にも合うように充電コネクタを差し込んでいきます。

充電コネクタはねじ止めしてください。使用するねじは皿小ねじ(M3-20: CSPCSZ-STU-M3-20)です。

これでスイッチパネルは完成しました!


バッテリー設置
使用するバッテリー(MNX4L-BS)はこちらです。

これから、バッテリーの配線を作っていきますが、まだ配線の先は繋ぎません。その状態で端子がぶらぶらしていると危ないため、必ず配線の先は絶縁テープなどで絶縁しておくようにしてください。
直列に接続
このバッテリーは12 Vですが、24 Vで使用したいため、直列に接続します。まずは片方の+から、もう片方の-からそれぞれ2本ずつ配線を伸ばします。これはY字端子を圧着した線をねじ止めした後に絶縁テープで絶縁した後の写真です。。。

直列につなぐためのケーブルはこんな感じでY字端子を圧着し、端子の根本を熱収縮チューブで保護したものを作ります。バッテリー同士は隣に配置するため、短くて良いです。

作成した線を用いて空いている+と-を接続し、ねじ止めします。

接続したら全て絶縁しましょう。

本体への取り付け
今度は本体へ取り付けていきます。まずはバッテリーを設置する場所を確認しましょう。今、ロボットはこのようになっているはずです。

ここにimuを固定するための棚板(中段)を取り付けます。

モータ固定時に3点のみ固定し、1つ空いている穴があると思います。そこにモータスペーサも含めて重ね、六角穴ボルト(M5-25: CBE5-25)とM5ナットで固定します。
表はこんな感じで、、、

裏はこんな感じ。

左右両方ナットで固定します。

実際にバッテリーを入れていきます。まずは入れるところのミスミフレームを取り外しましょう。写真では90度回転させています。

このようにバッテリーを入れてください。

再びミスミフレームを入れて固定するのですが、このときにバッテリーが干渉するようであれば、ミスミフレームの位置を調整してください。底板のねじ穴が楕円のようになっているので、前後に左右に調整できるはずです。

最終的に、私たちはこちらのように固定しました。(バッテリーを入れると重たくなるので、倒すときは十分に注意を...)

実際の向きに直すとこんな感じ。

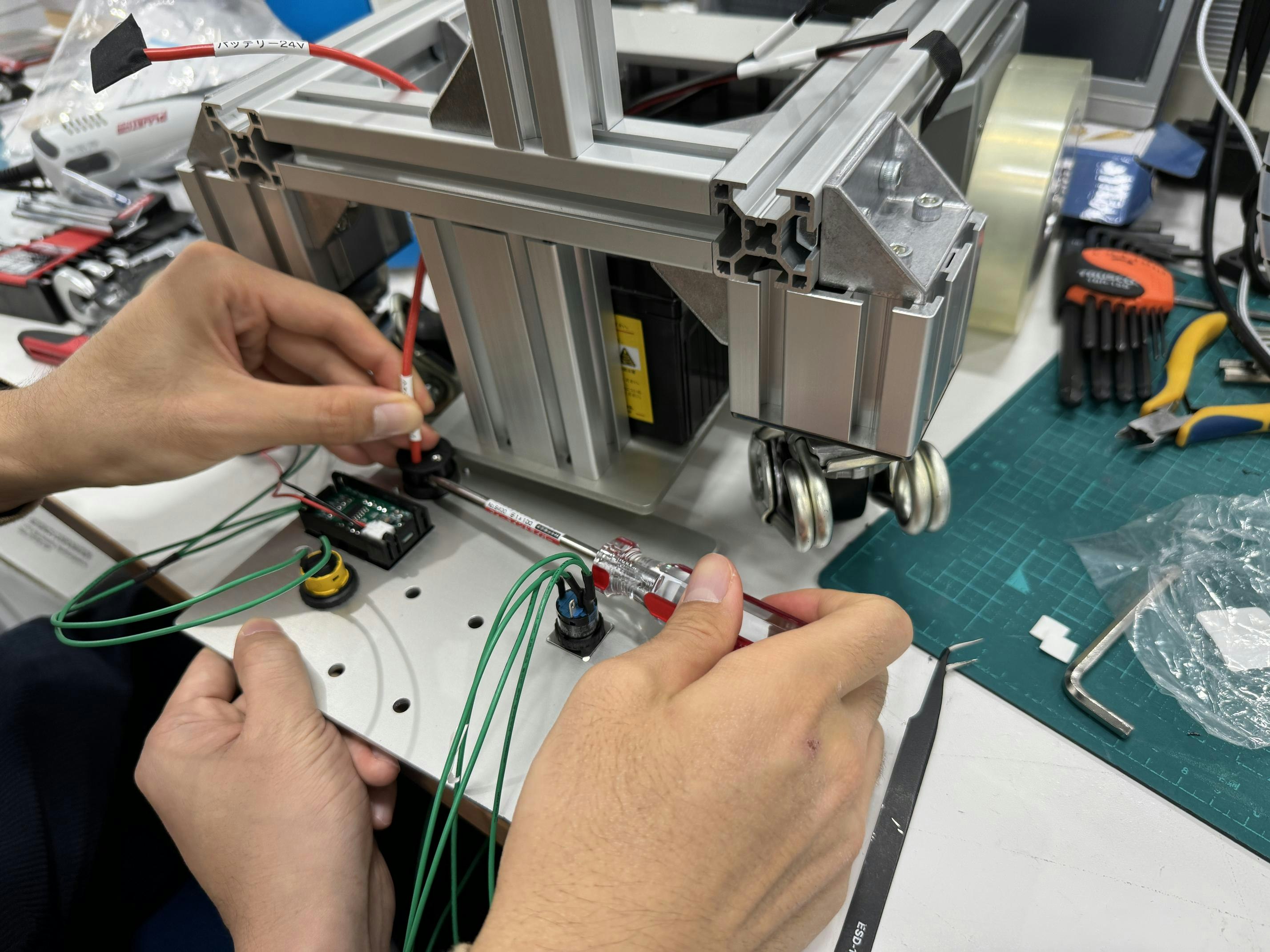
スイッチパネル取り付け
本記事の前半で作成したスイッチパネルを本体に取り付けていきます。まずは充電プラグにバッテリーを接続しましょう。十分に注意してバッテリーの24 Vの線とGNDの線を引っ張ってきます。


これらを充電コネクタに接続します。充電コネクタは1の+と-、2の+と-があります。後ほど充電器を加工する際に使用するので、どちらに付けたかを覚えておいてください。私たちは2の+にバッテリーの24 Vの線、2の-にGNDの線を接続しました。線自体はねじ止めできます。今回は圧着せず、心線をそのまま充電コネクタにねじ止めしました。

GNDも同様に接続してください。
スイッチパネルをロボット本体に固定していきます。フレームナット、低頭六角穴ボルト(M5-10: CBSA5-10)を4つずつ使用して、固定してください。

しっかり固定するとこんな感じ。

以上でバッテリや非常停止ボタンなどがロボットに付いたと思います。(まだボタンは機能しませんが。。。)

次回はセンサを取り付けていきたいと思います!