目次
| 記事 | 概要 |
|---|---|
| 01.概要 | @mobi Open Trial Kit 1.0とは |
| 02.フレーム組み立て | フレーム部分の組み立て |
| 03.車輪取り付け | 車輪を本体に取り付けるところまで <- 本記事はここ |
| 04.スイッチとバッテリー | スイッチ類(背面パネル)とバッテリー設置まで |
| 05.センサ取り付け | IMU、LiDAR、DC-DCコンバータ、端子台取り付けまで |
| 06.完成 | モータドライバ、残りの配線、天板取り付けまで(ハードウェア完成) |
| 07.動作確認 | ソフトウェアセットアップ、@mobi動作確認まで |
組み立て
CAD
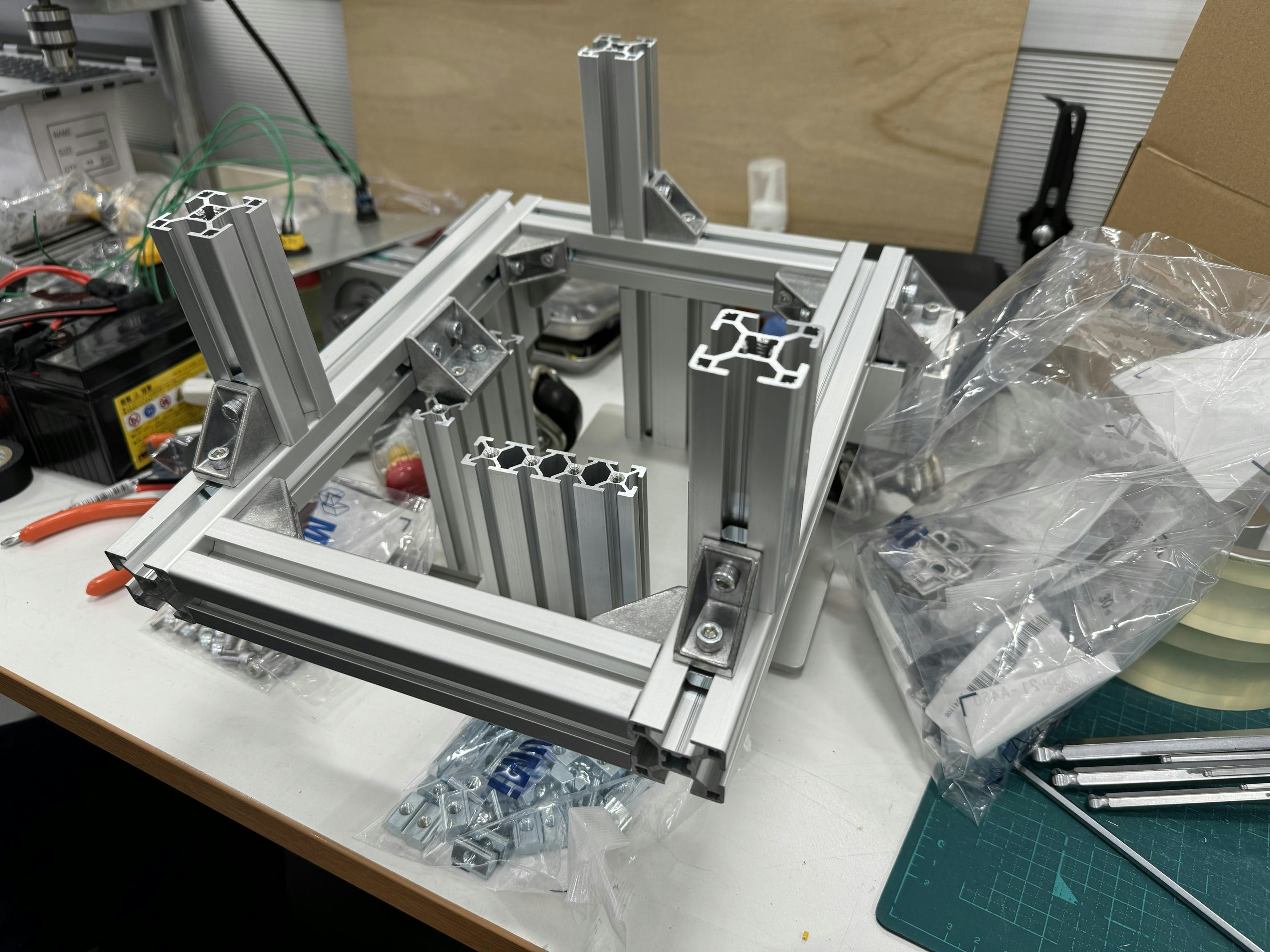
前回、
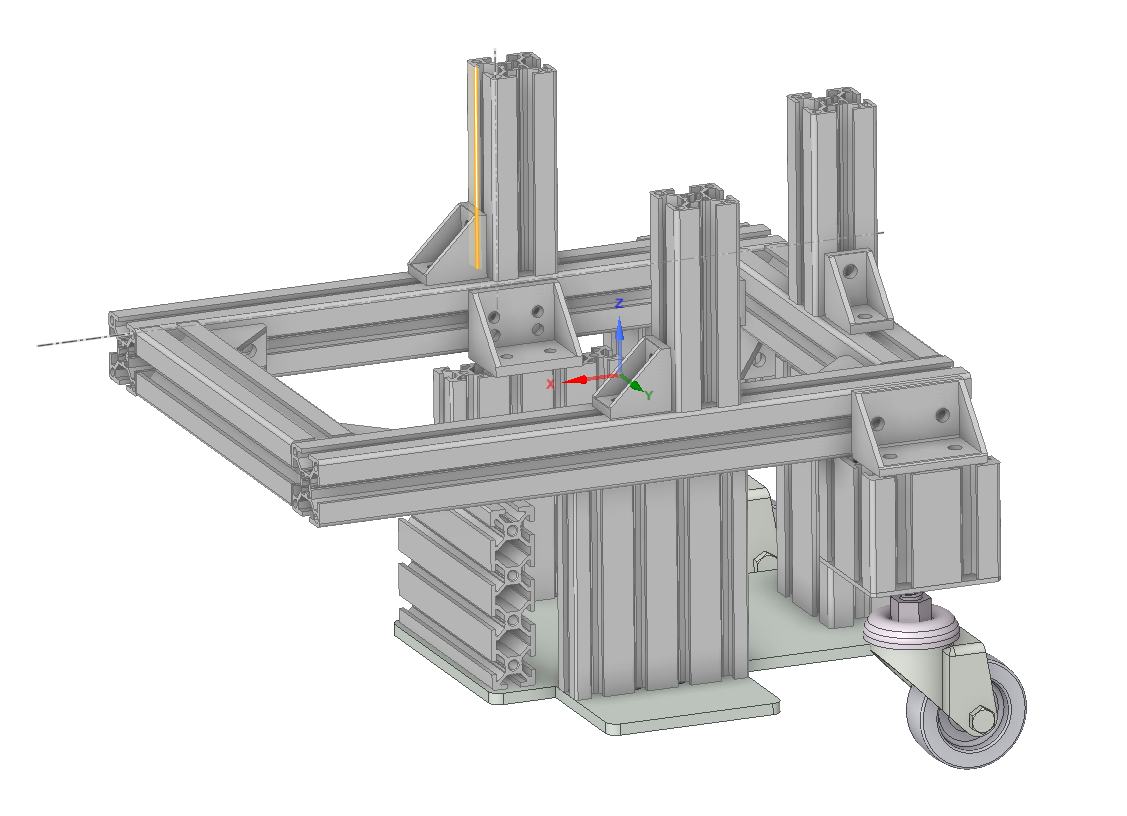
まで組みあがったはずです。
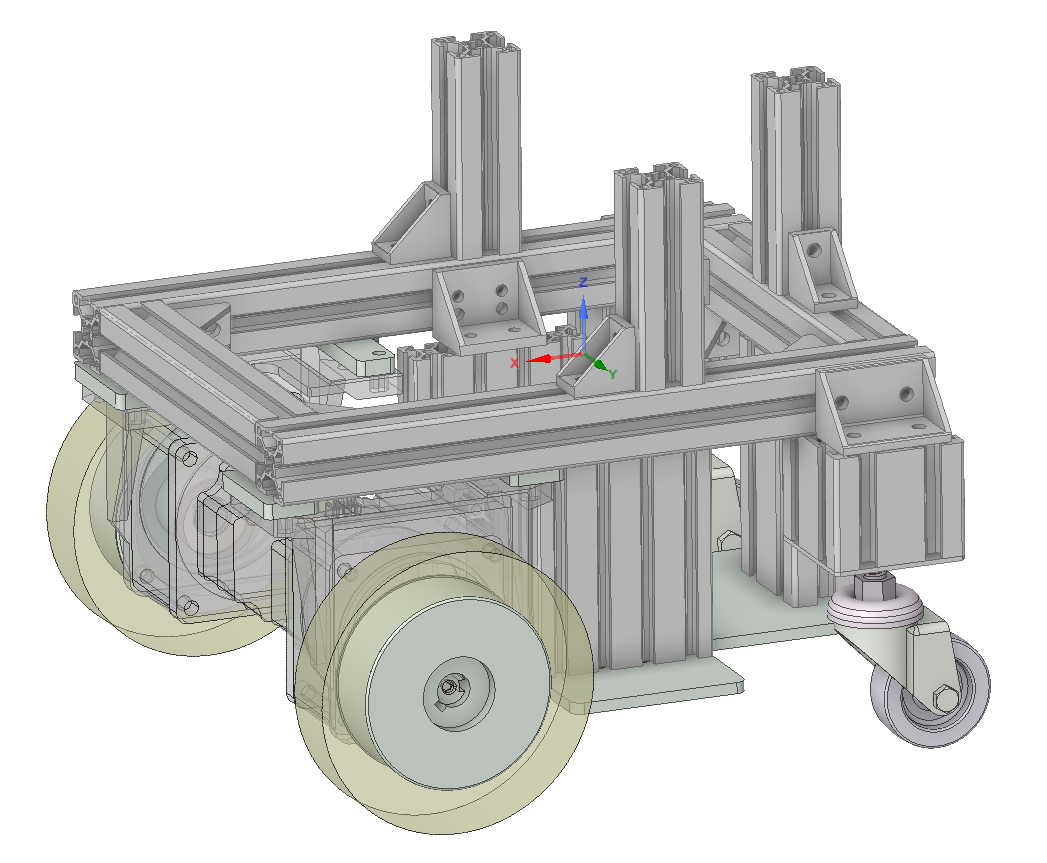
今回は車輪を取り付けて下図まで組み立てることを目指します。
車輪取り付け
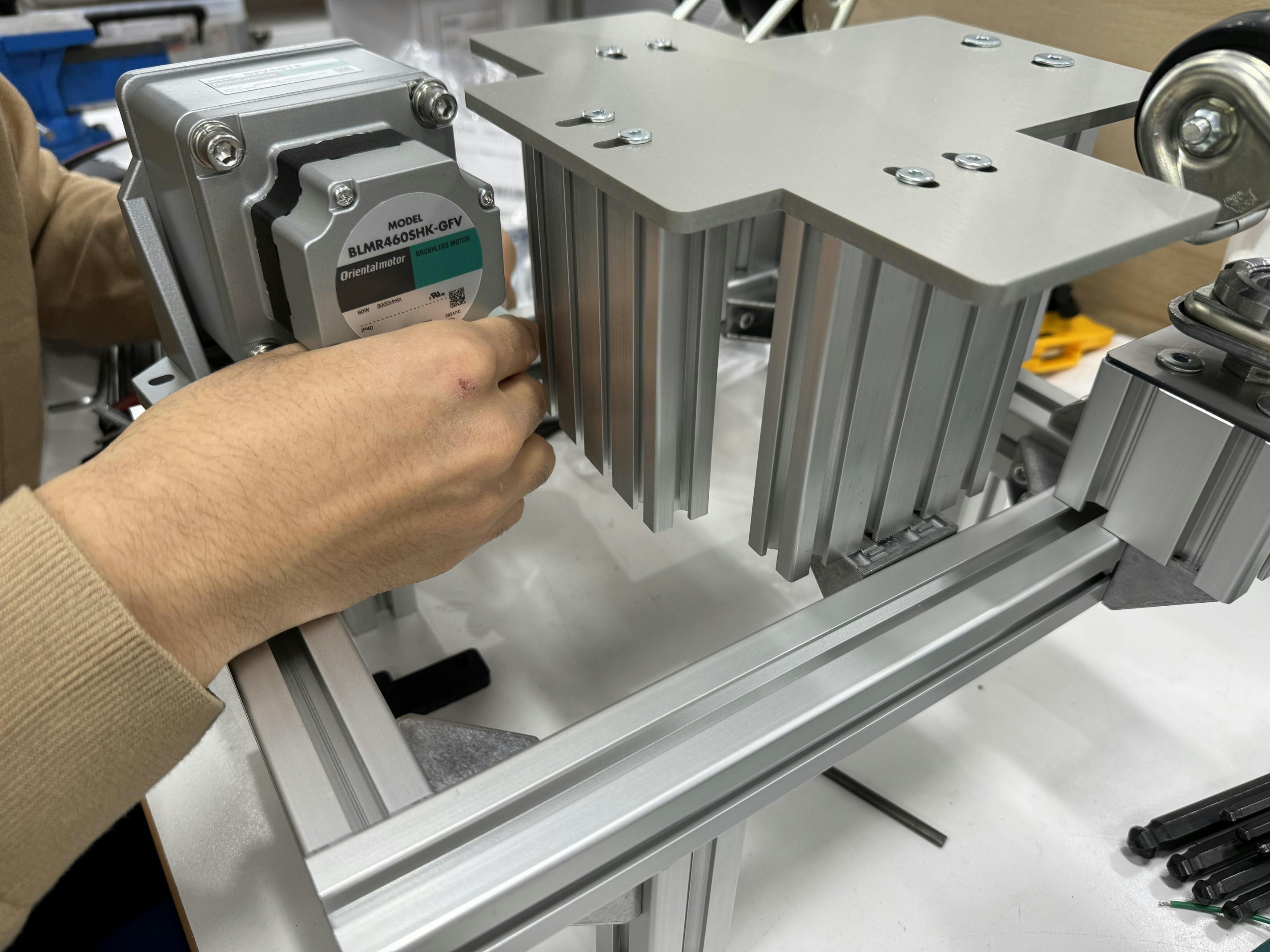
モータとモータ固定具の取り付け
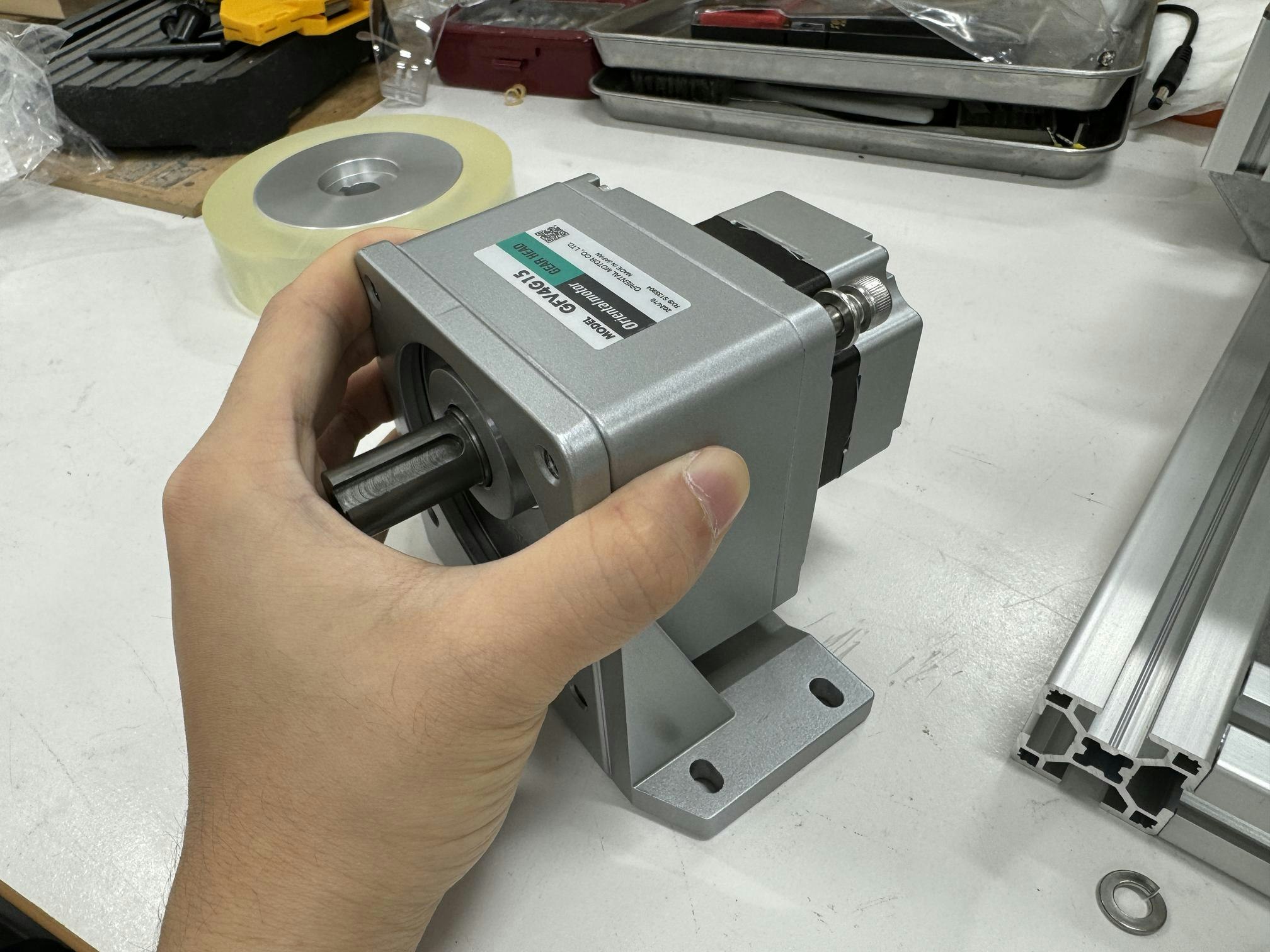
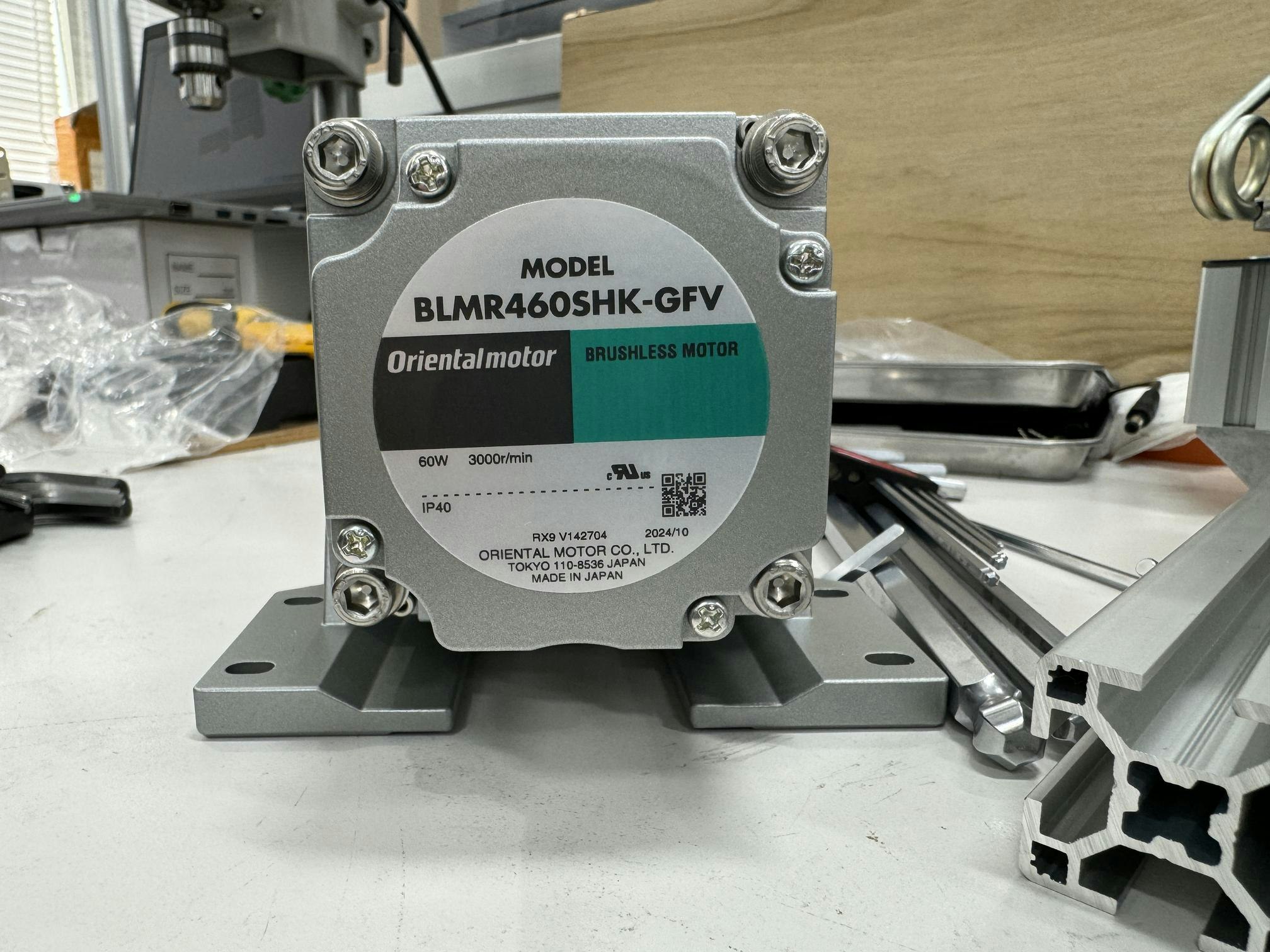
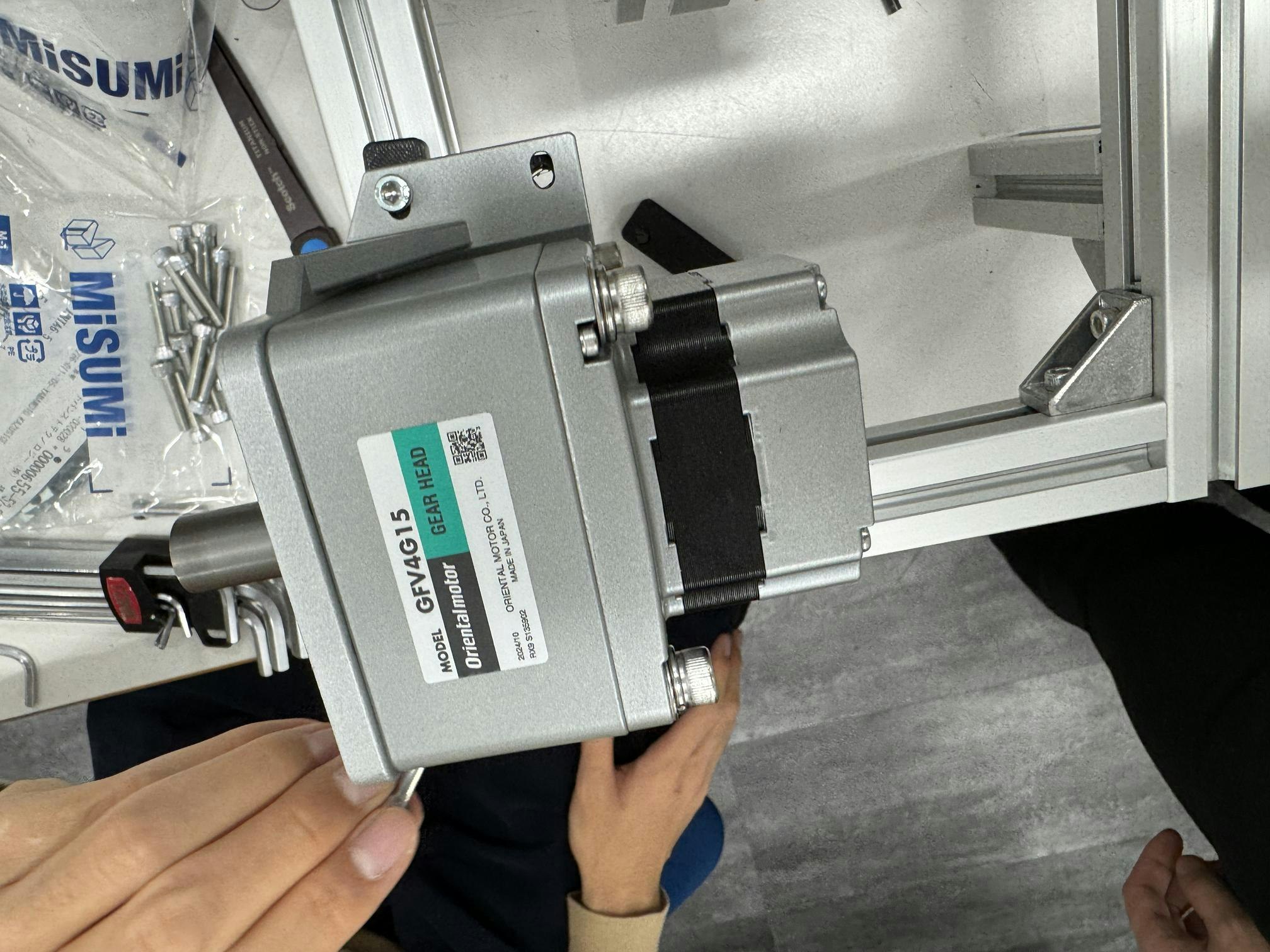
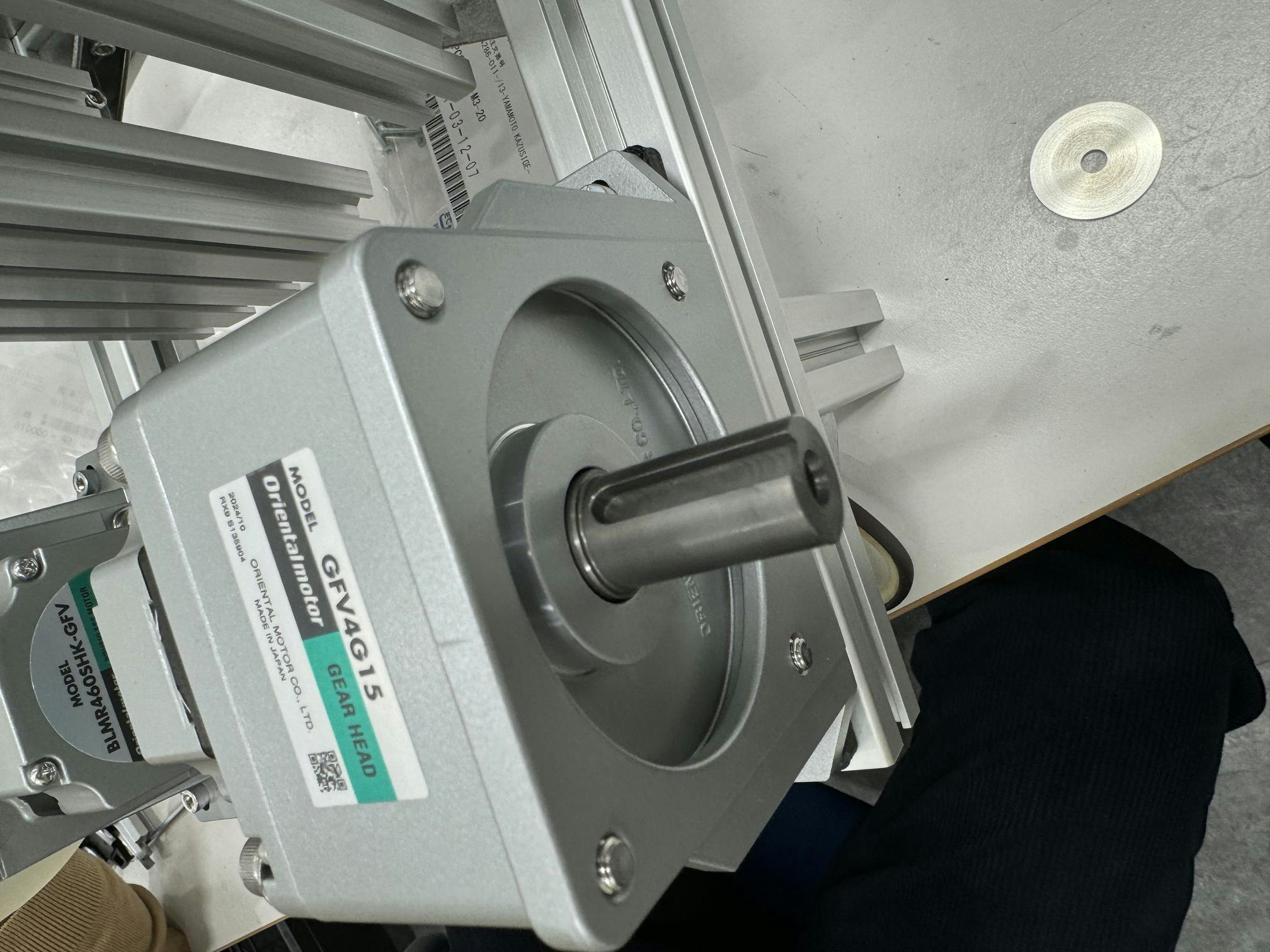
今回、オープンハードウェアに使用するモータはオリエンタルモータのBLMR460SHK-15です。

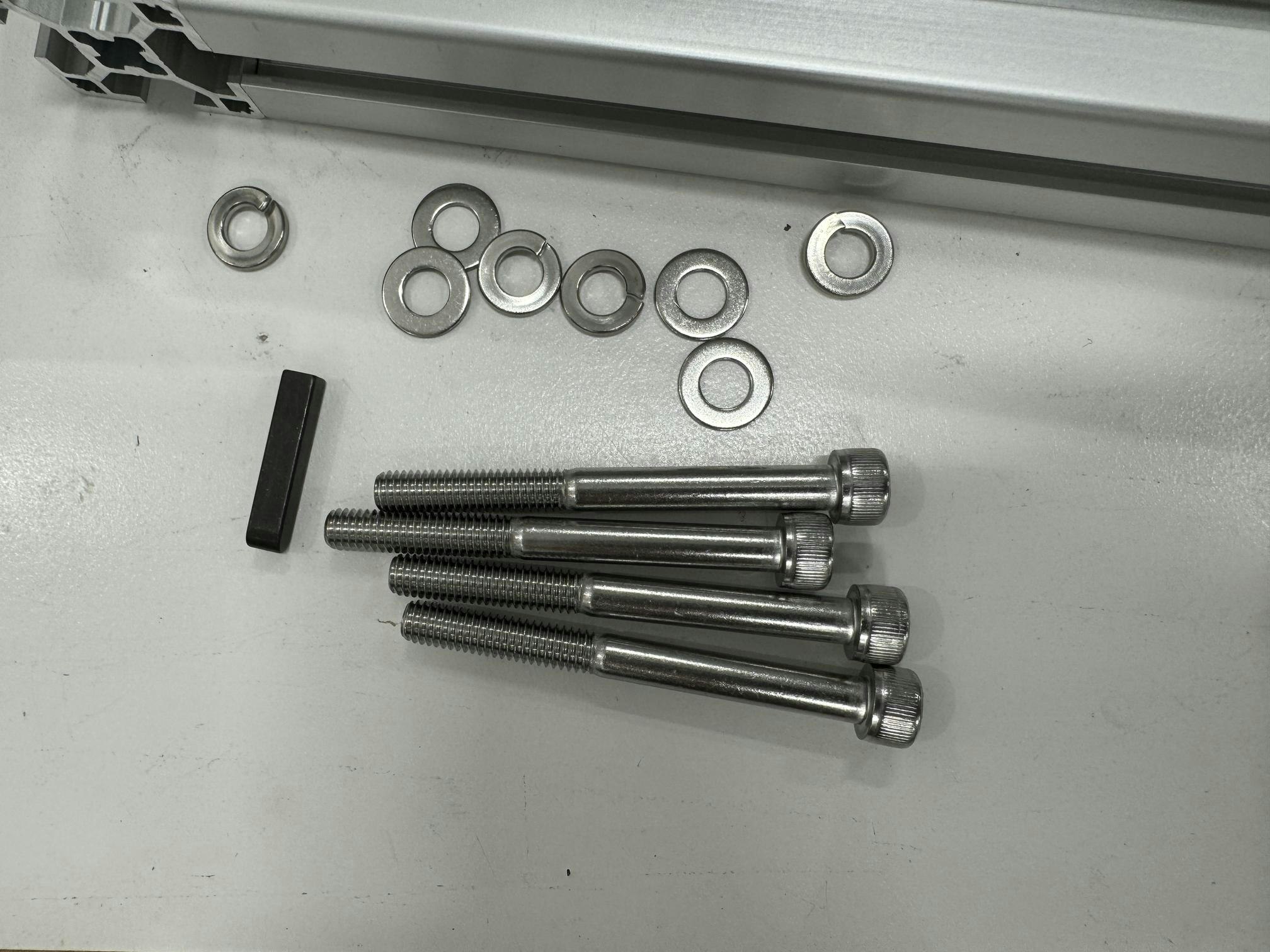
このモータの固定具(SOL4M6F)はこちらです。

これらのねじやキー、座金などを用いて固定していきます。
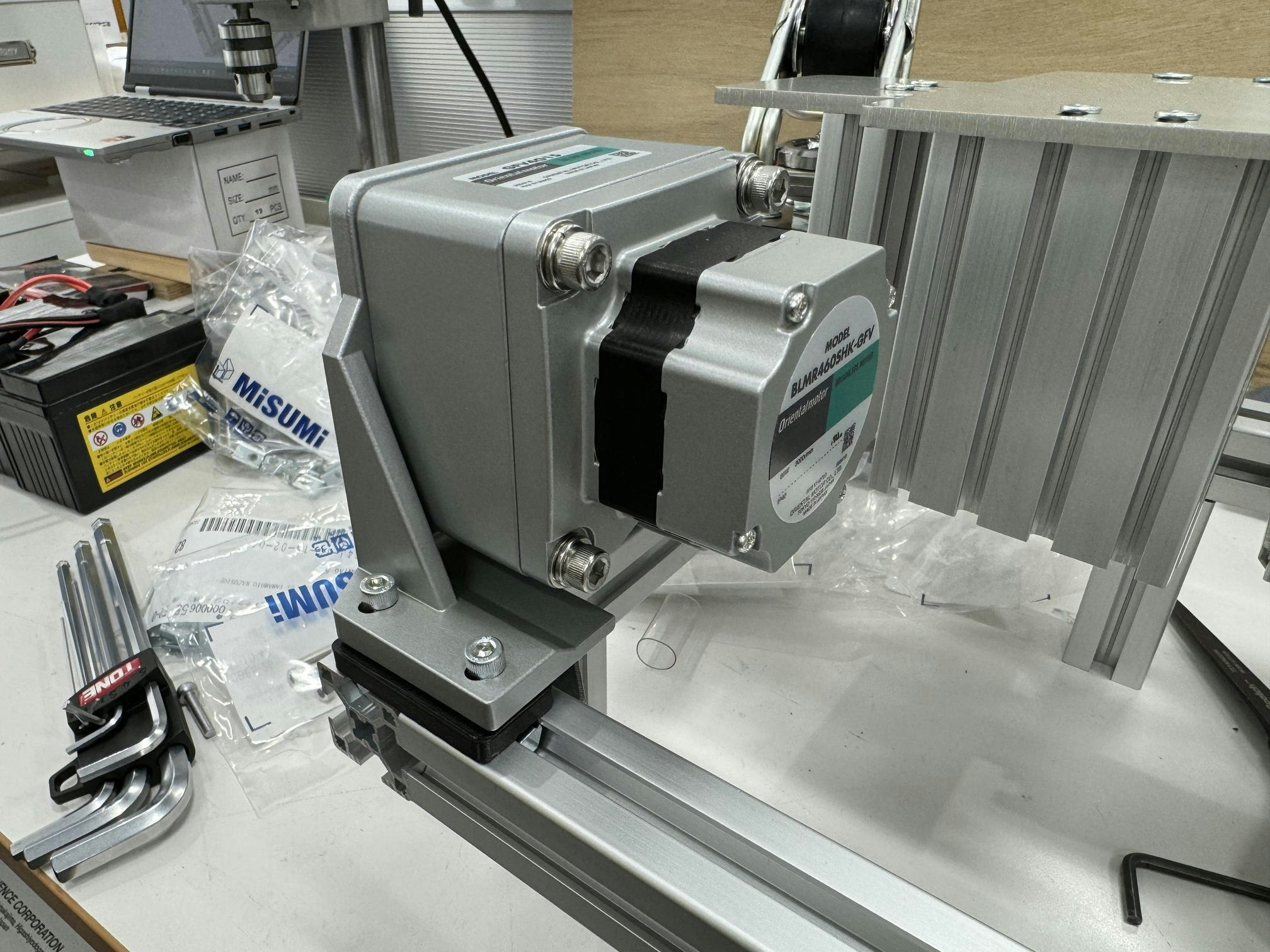
モータと固定具を合わせます。図のようにモータの軸が外側に位置するような形で取り付けます。ねじはモータ側から固定具へとつけていきます。
4箇所とも止めましょう。モータ側から見るとこのような感じです。
支柱の固定
次は天板を支えるための支柱を取り付けます。モータを固定する際に、本体をひっくり返すために使います。

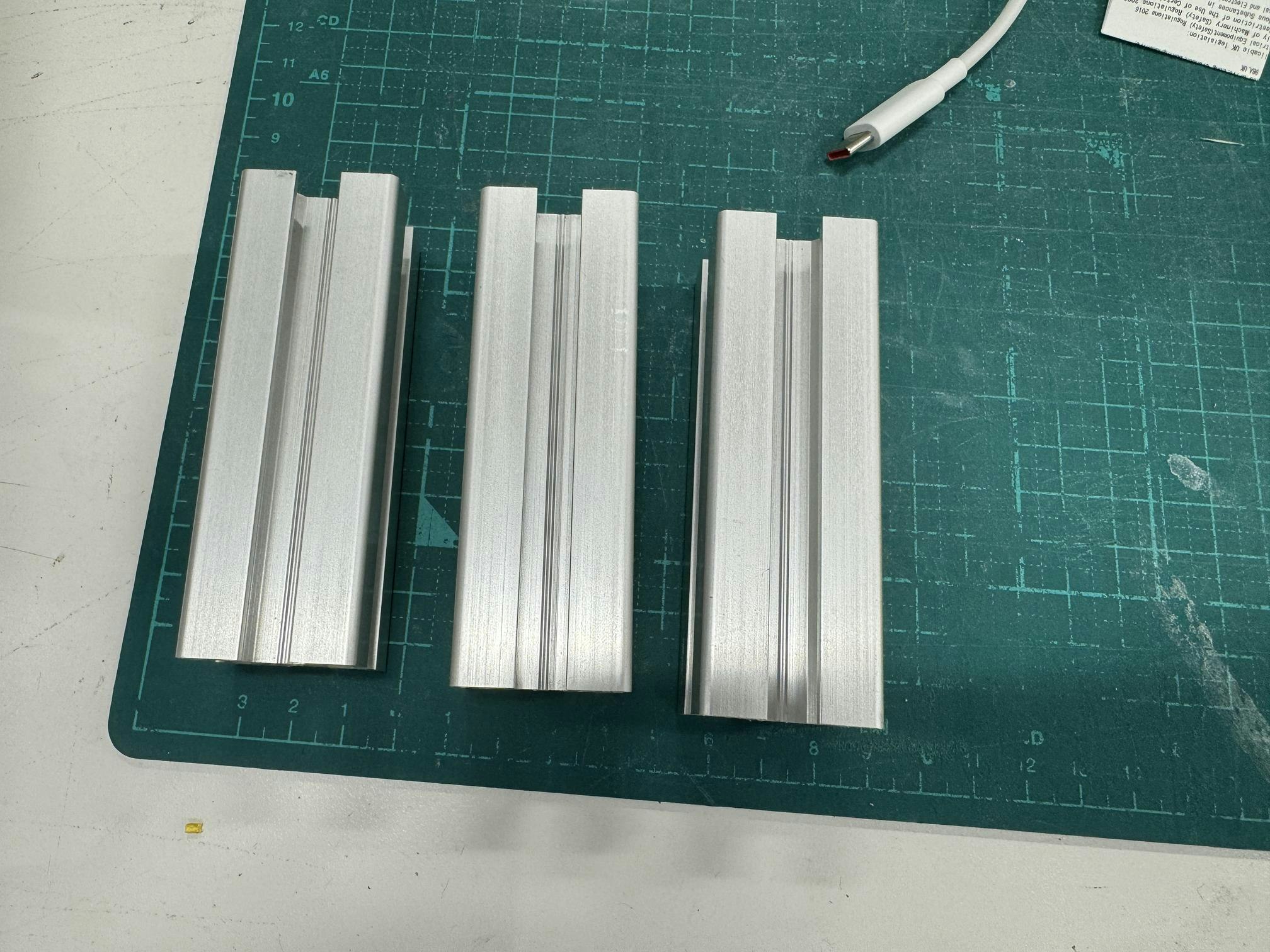
使うのはこちらのミスミフレーム(30×30×90 mm: NFSL6-3030-90-RTP)3個です。
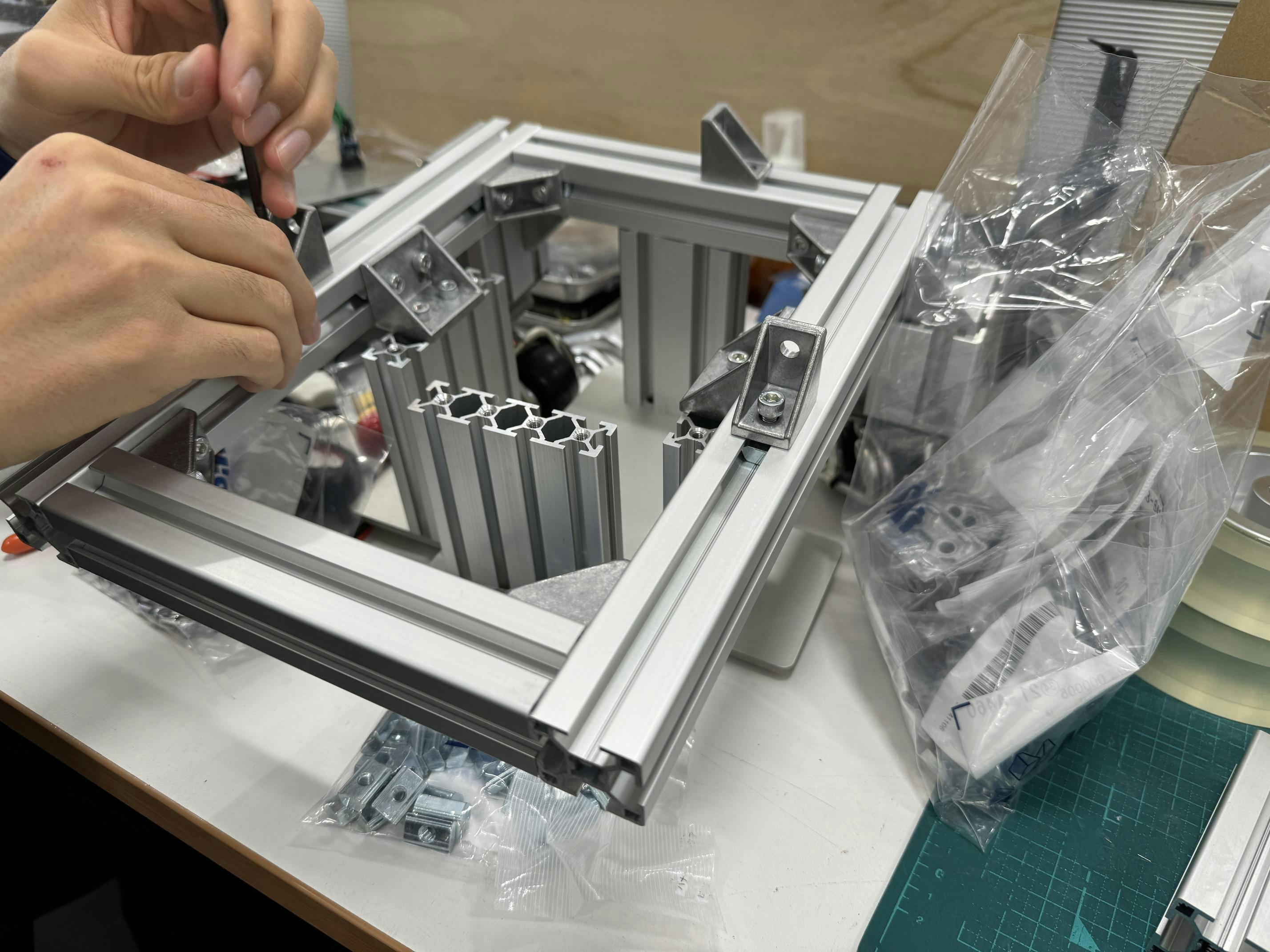
タップが切られている方を上(本体とは逆側)に取り付けていきます。このタップで後で天板を固定します。

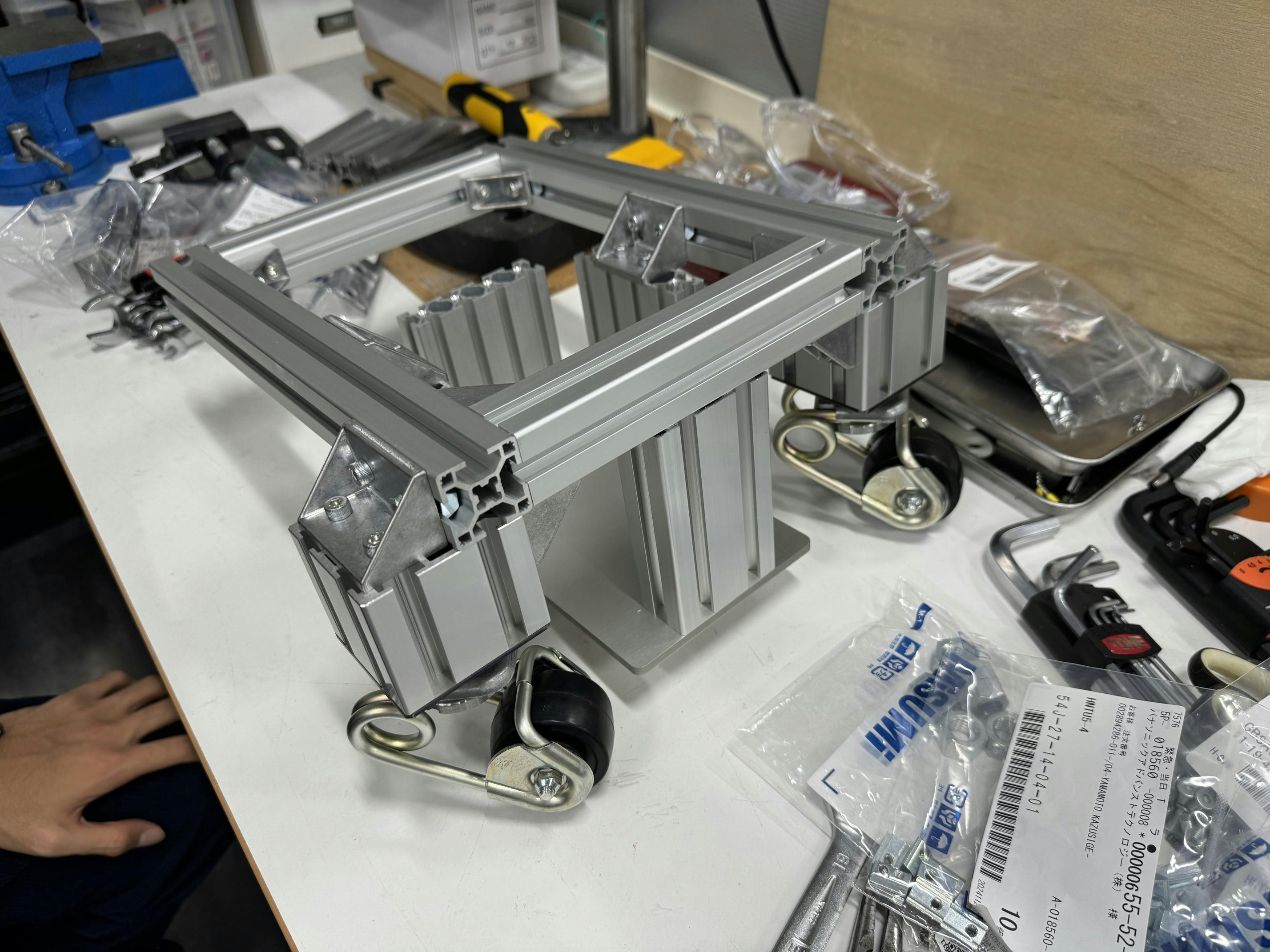
まずは仮止めです。連結ブラケット(HBLFS6)をそれぞれ六角穴ボルト(M5-12: CBE5-12)とフレームナットで図のように止めてください。最終的には決められた位置に固定しますが、今は大まかな位置で良いです。
先ほど用意したミスミフレームをつけるとこんな感じ。
車輪取り付け
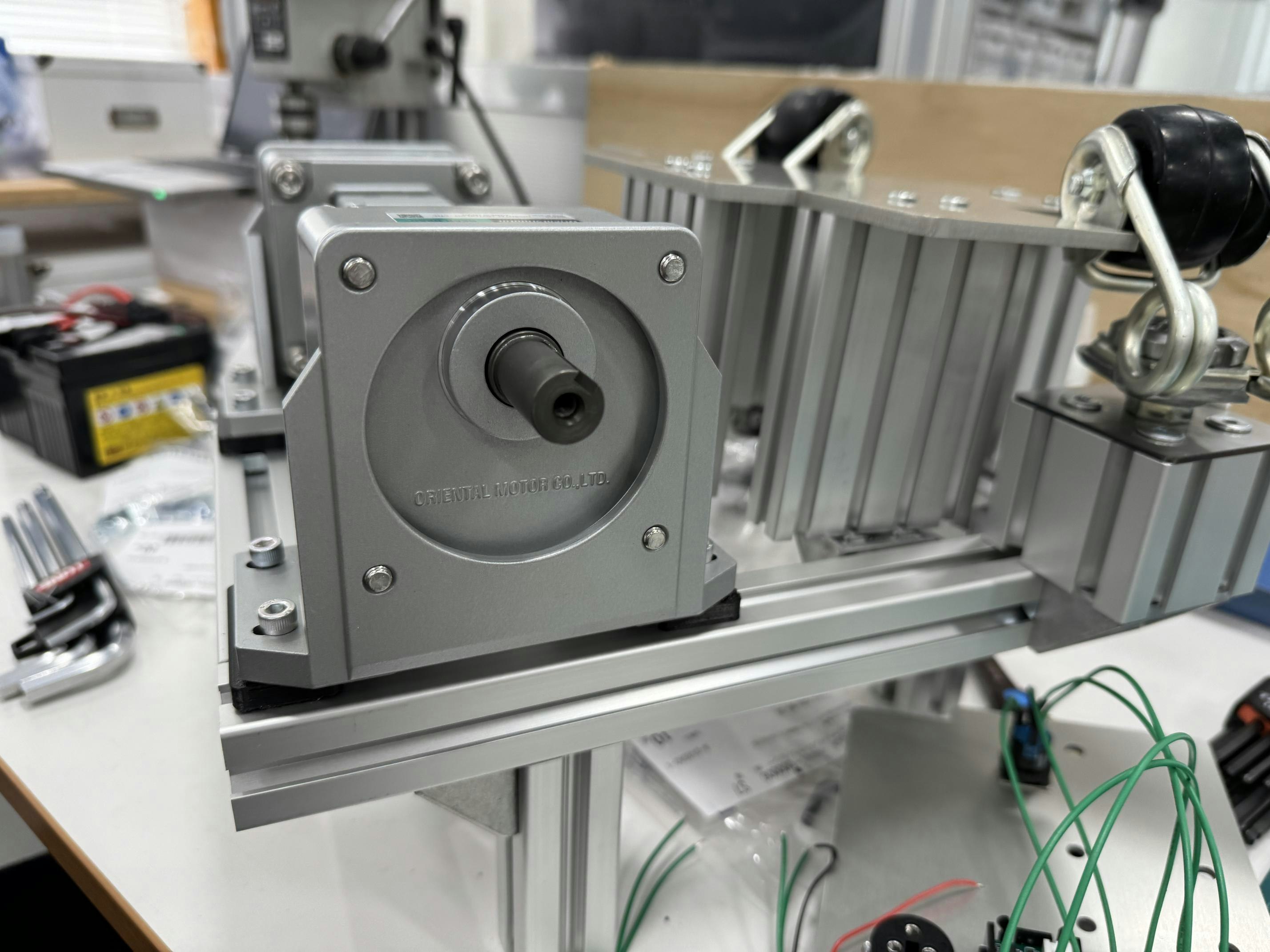
本体をひっくり返して、モータを取り付けていきます。
モータ固定具と本体の間にはモータスペーサとモータスペーサ2を入れます。スペーサの穴に合う位置にはフレームナットを入れておいてください。

スペーサの上にモータを設置します。モータの穴に合うようにスペーサとフレームナットの位置を調整してください。
上から見るとこんな感じです。今は4点の内、3点ずつ六角穴ボルト(M5-25: CBE5-25)止めておきます。

六角穴ボルトをしっかりと固定してください。
もう片方のモータも同様に固定してください。


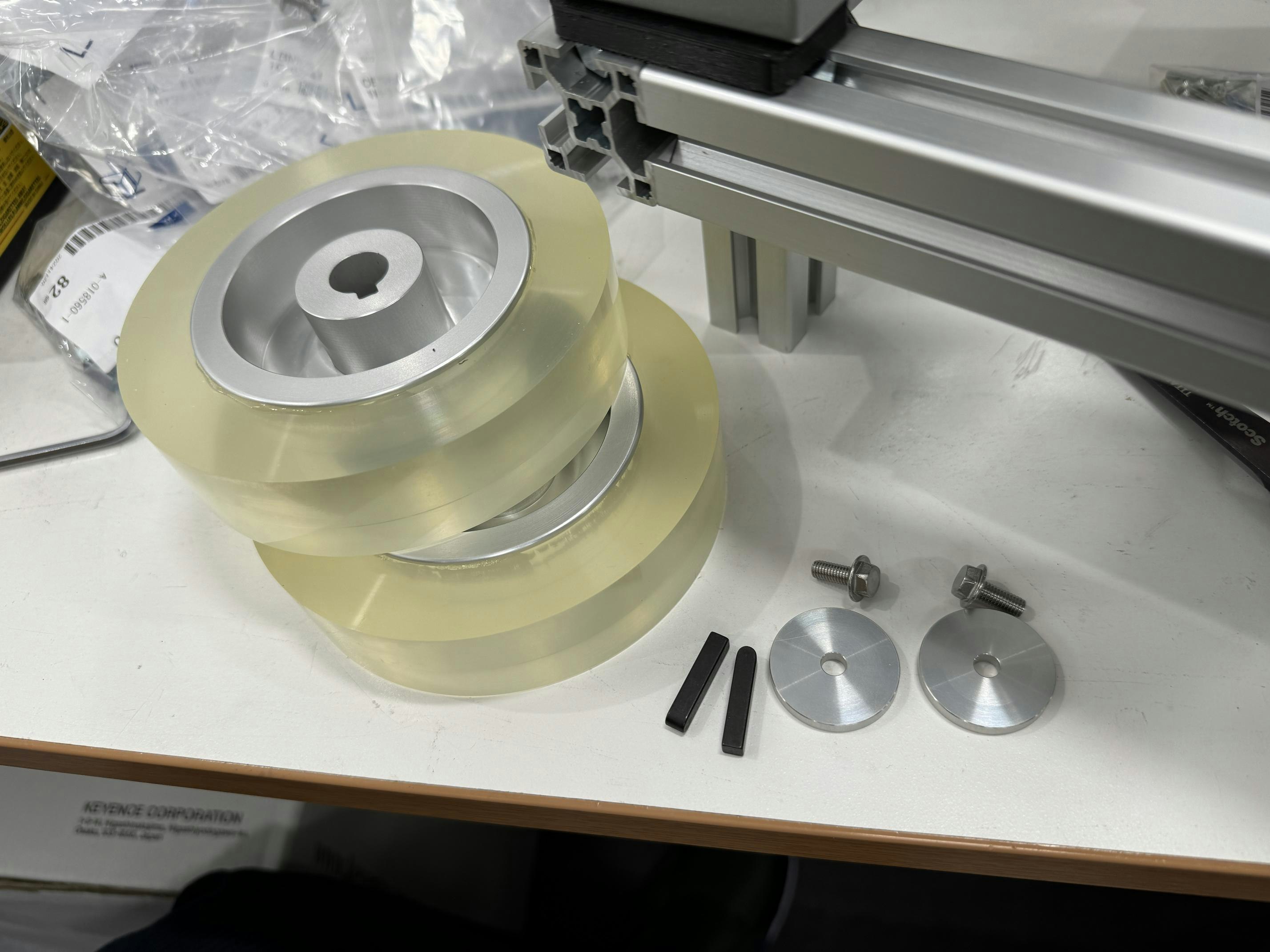
いよいよ、車輪を取り付けていきます。必要なのは本体に加えて準備のときに接着剤を用いて固定した車輪など、こちらの物品です。
モータにはキー溝があります。モータ側が丸くなっているので、キーも丸い方を奥にして差し込んで行きます。
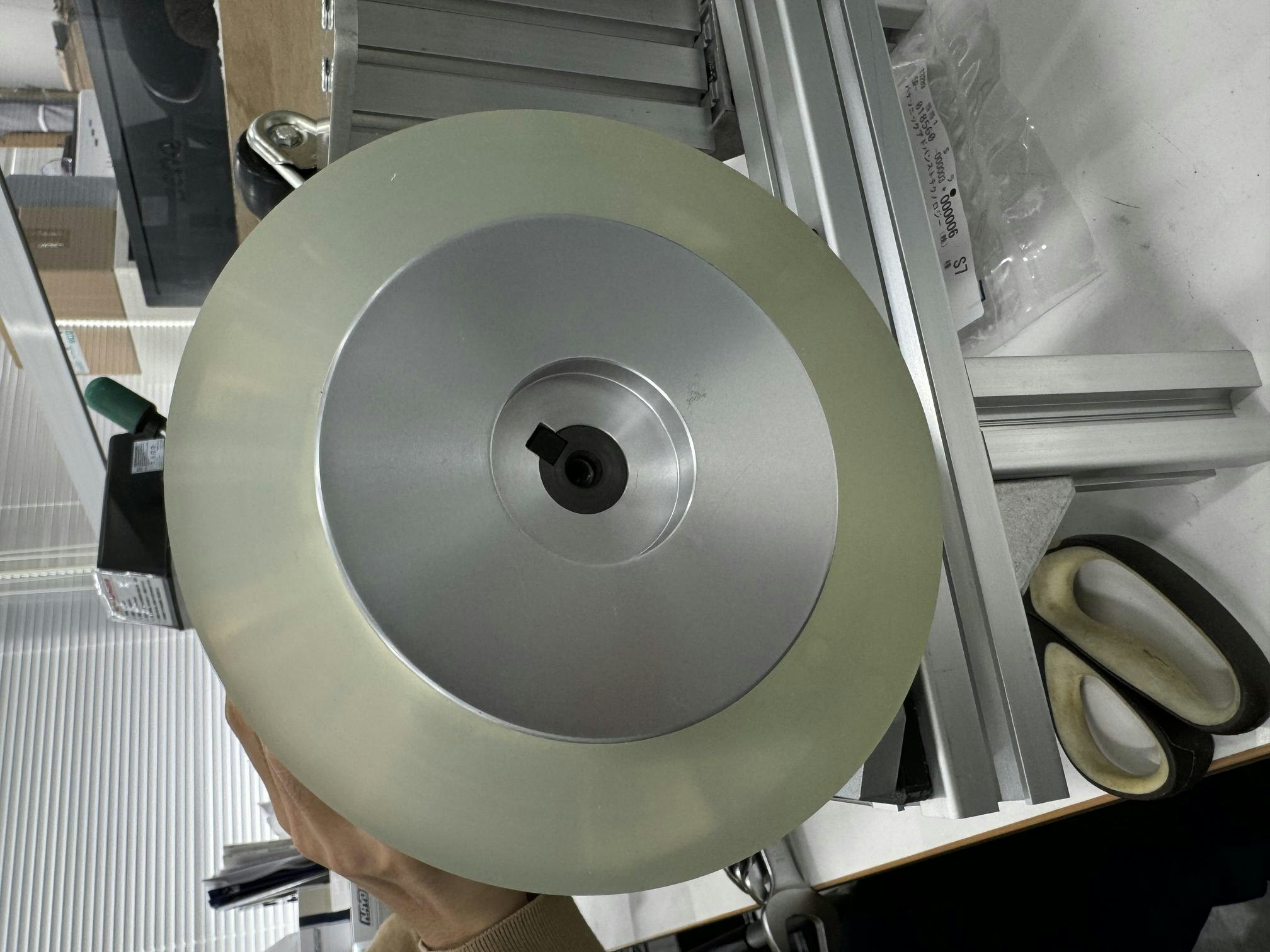
実際にモータの軸に車輪を取り付けてみましょう。写真のように、車輪の平べったい方が見えるように取り付けてください。その後、キーが入るように、溝が一致するように回転させます。
キーを入れていきます。反対側の車輪も手順は同じです。落ちないように1つずつ固定するのが良いと思います。
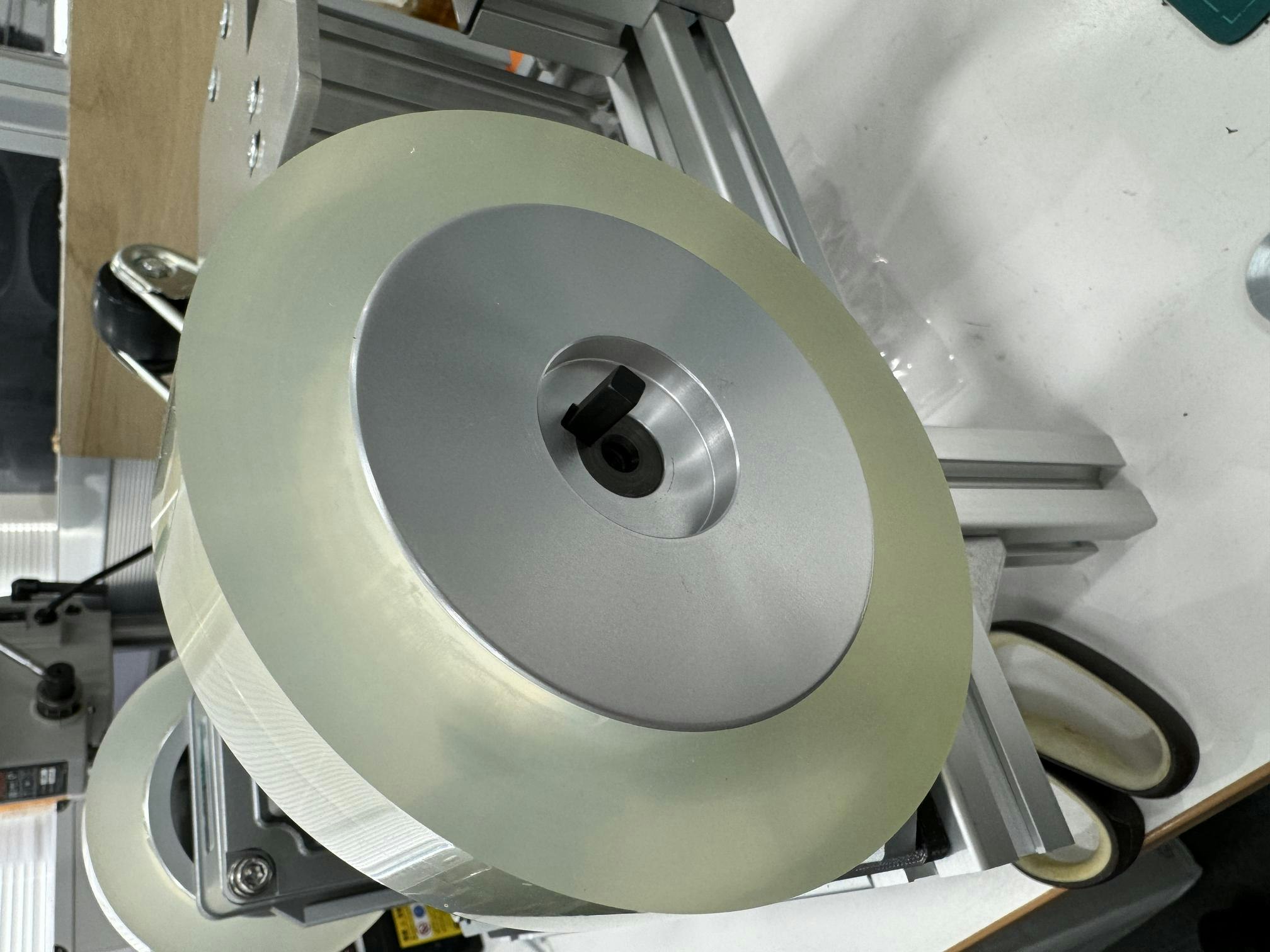
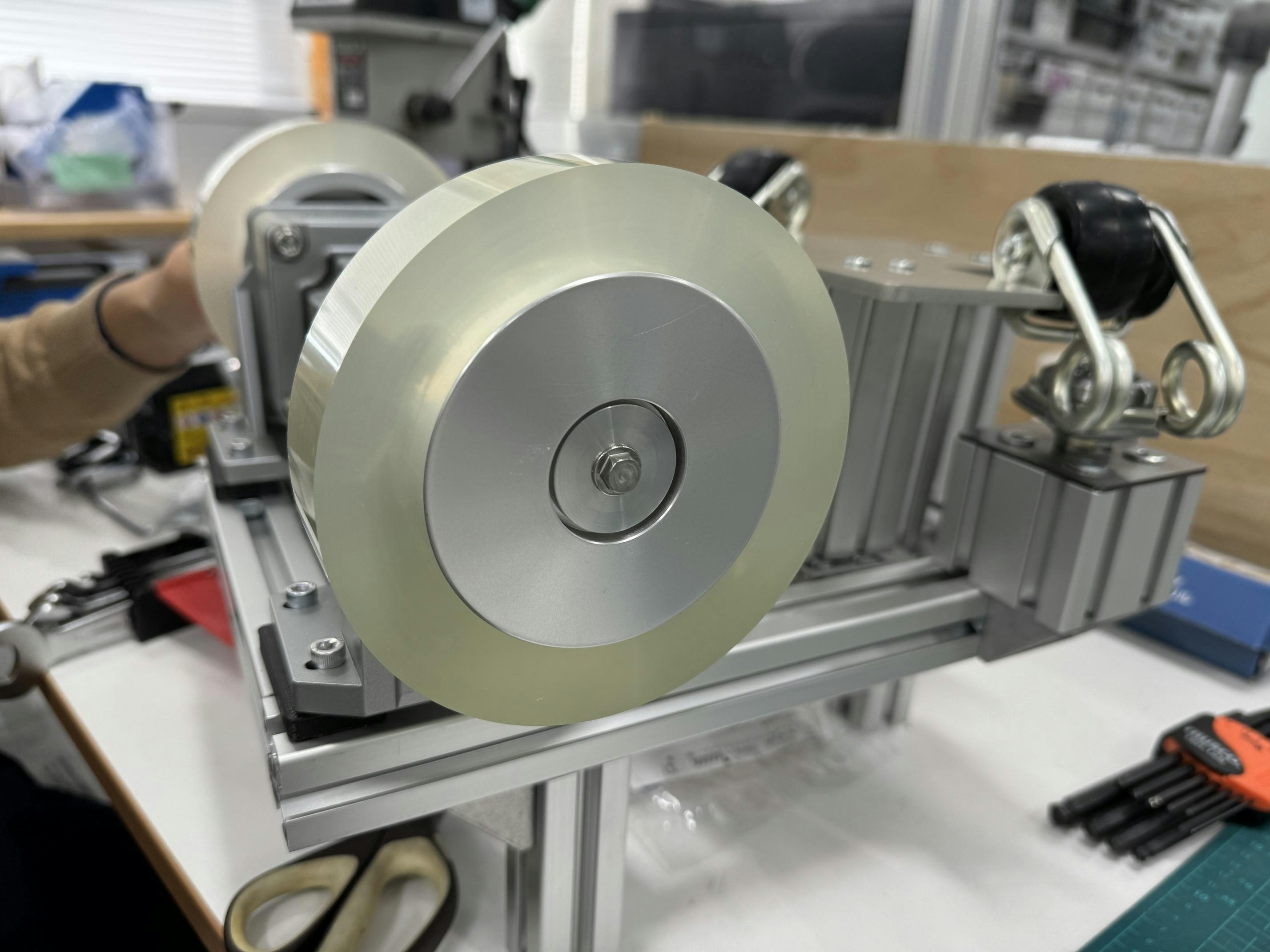
奥まで入れるとこんな感じ。
あとはねじで固定していきます。
ねじはスパナでしっかり固定しましょう。
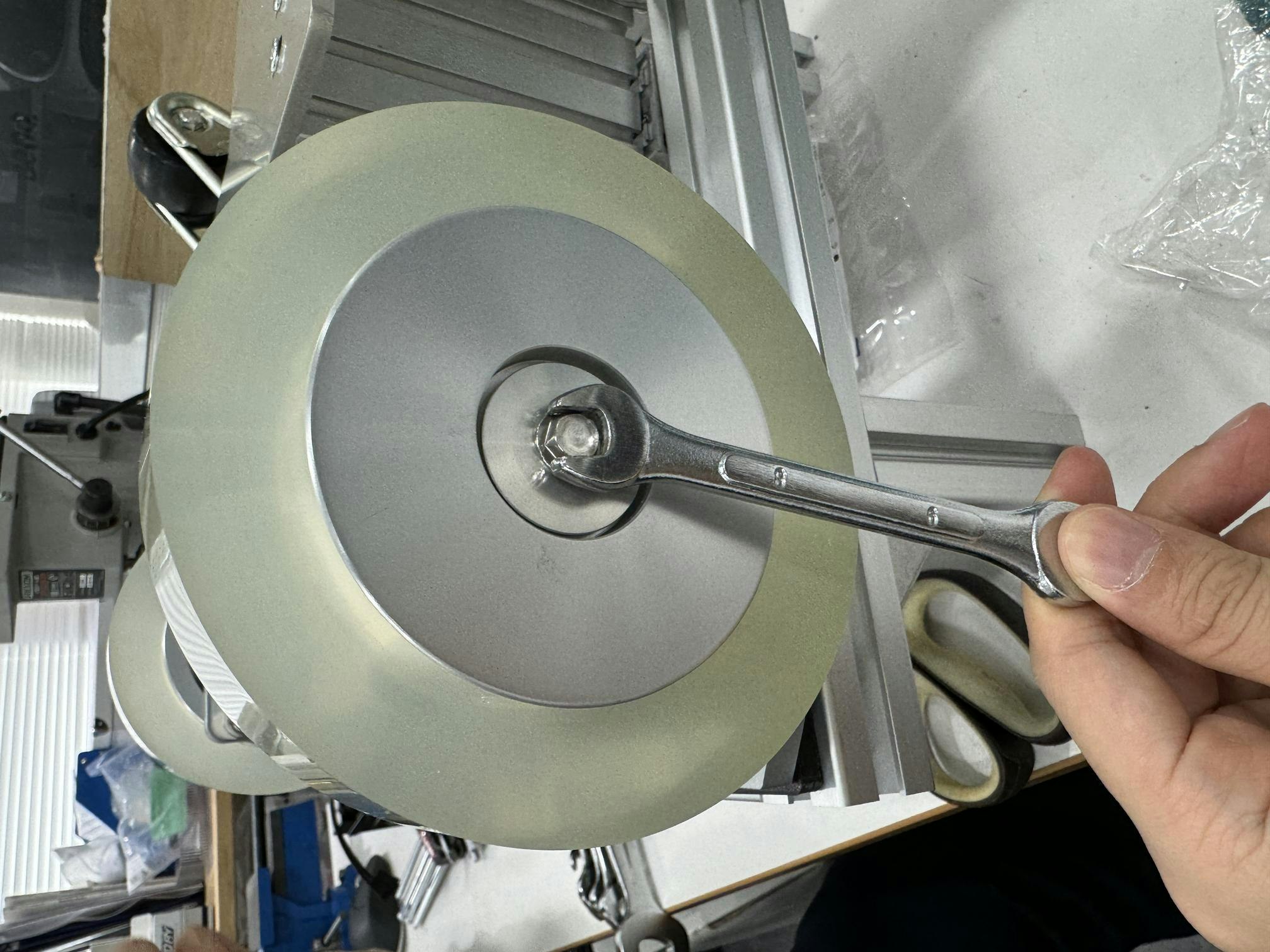
きっちり固定できたらOKです。
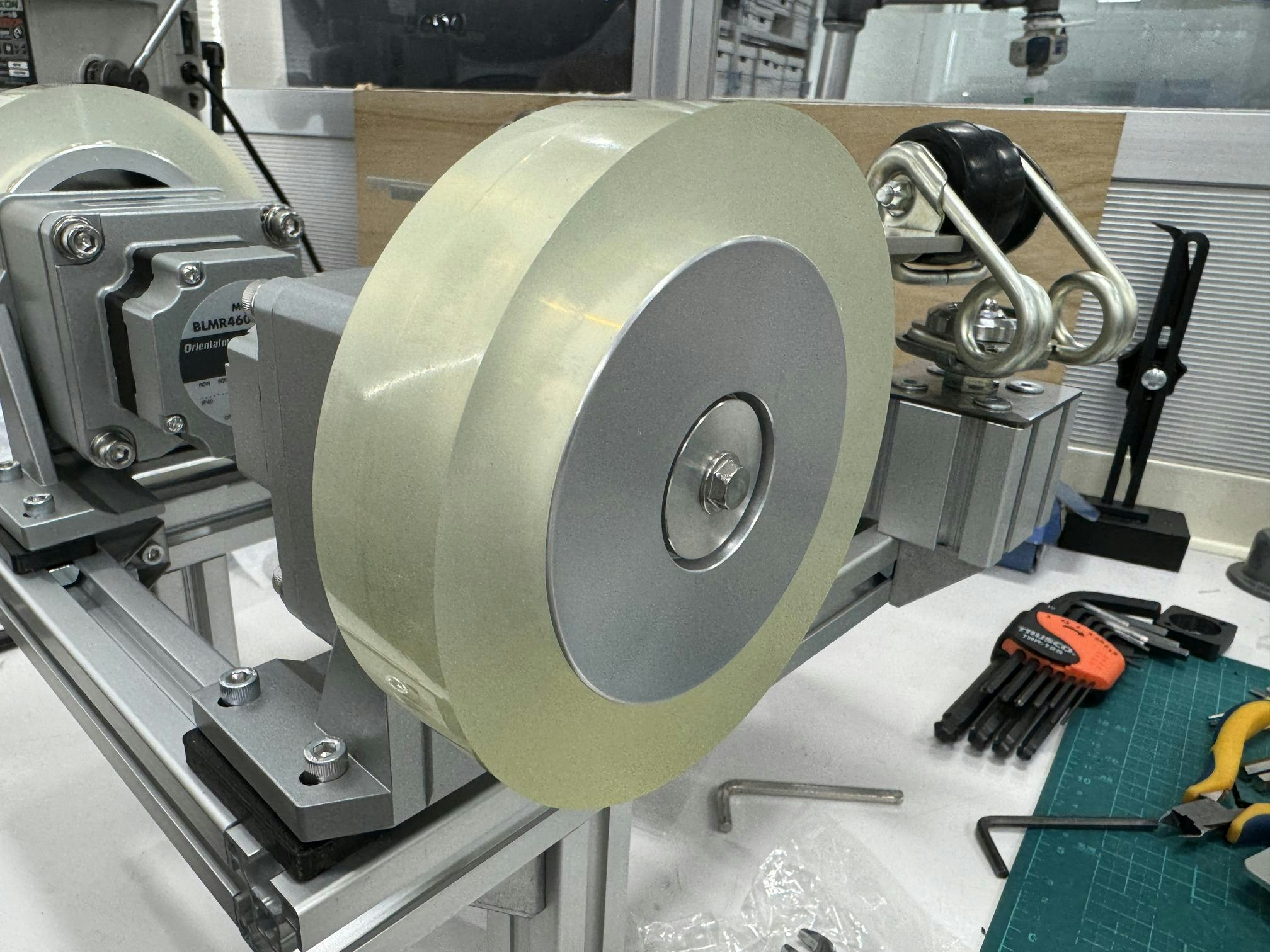
もう一回ひっくり返しましょう。


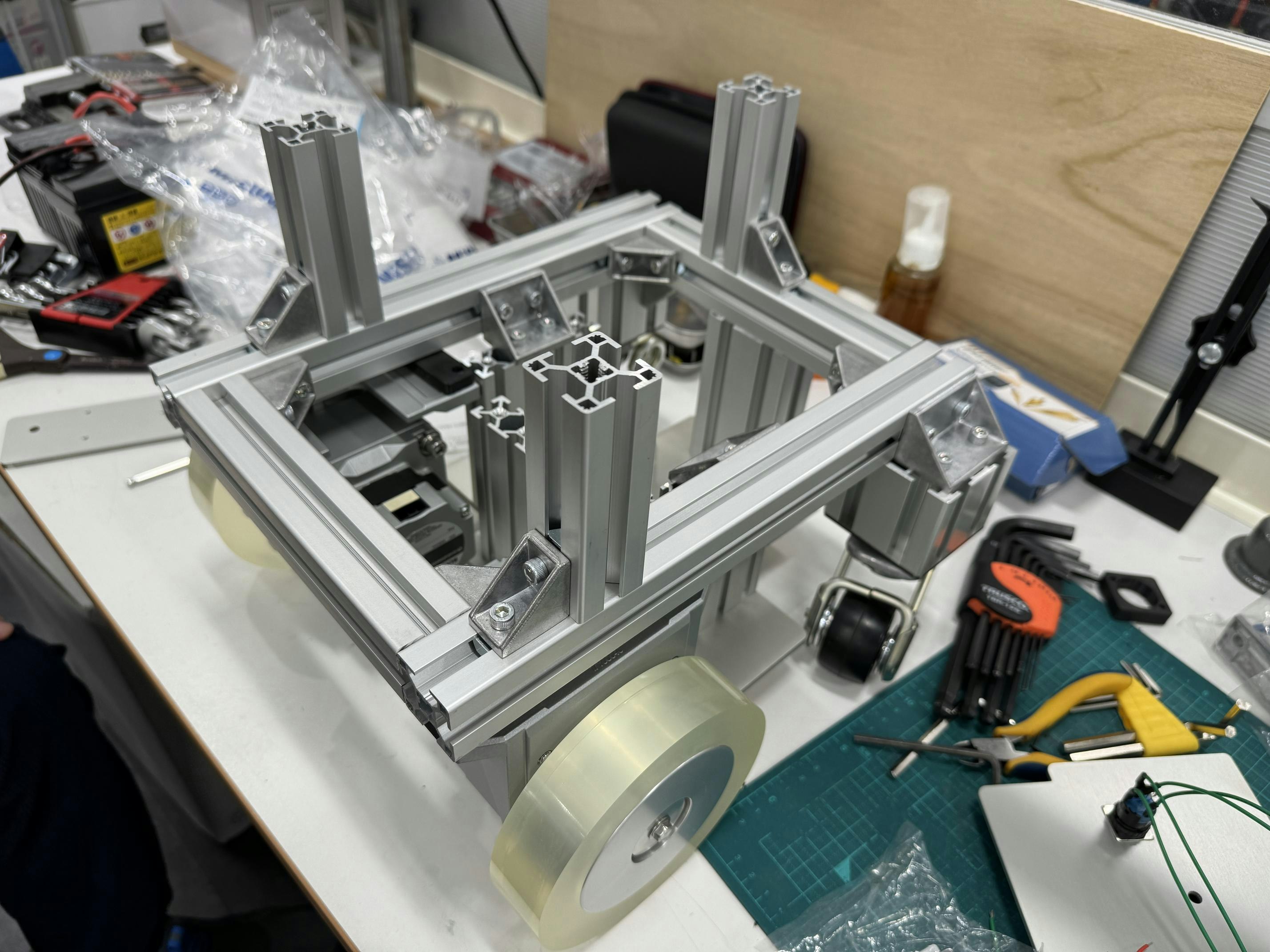
車輪もついて、ロボットっぽく?なってきましたね!
次回はスイッチやバッテリーなどを取り付けていきます。