関連Qiita
- Donkey Carの作り方(RasPi側)
- Donkey Car PS3 Joystick(RasPi側)
- Donkey Carで動きそうなラジコン
- Donkey Carの作り方(Mac側)
- Donkey Carの作り方(Windows側)
- Donkey Car Emulator(Mac側)
- Donkey Car学習
- Donkey Car Commandメモ
- Donkey Car Officialのドキュメント(リンク)
- AWS DeepRacerまとめ
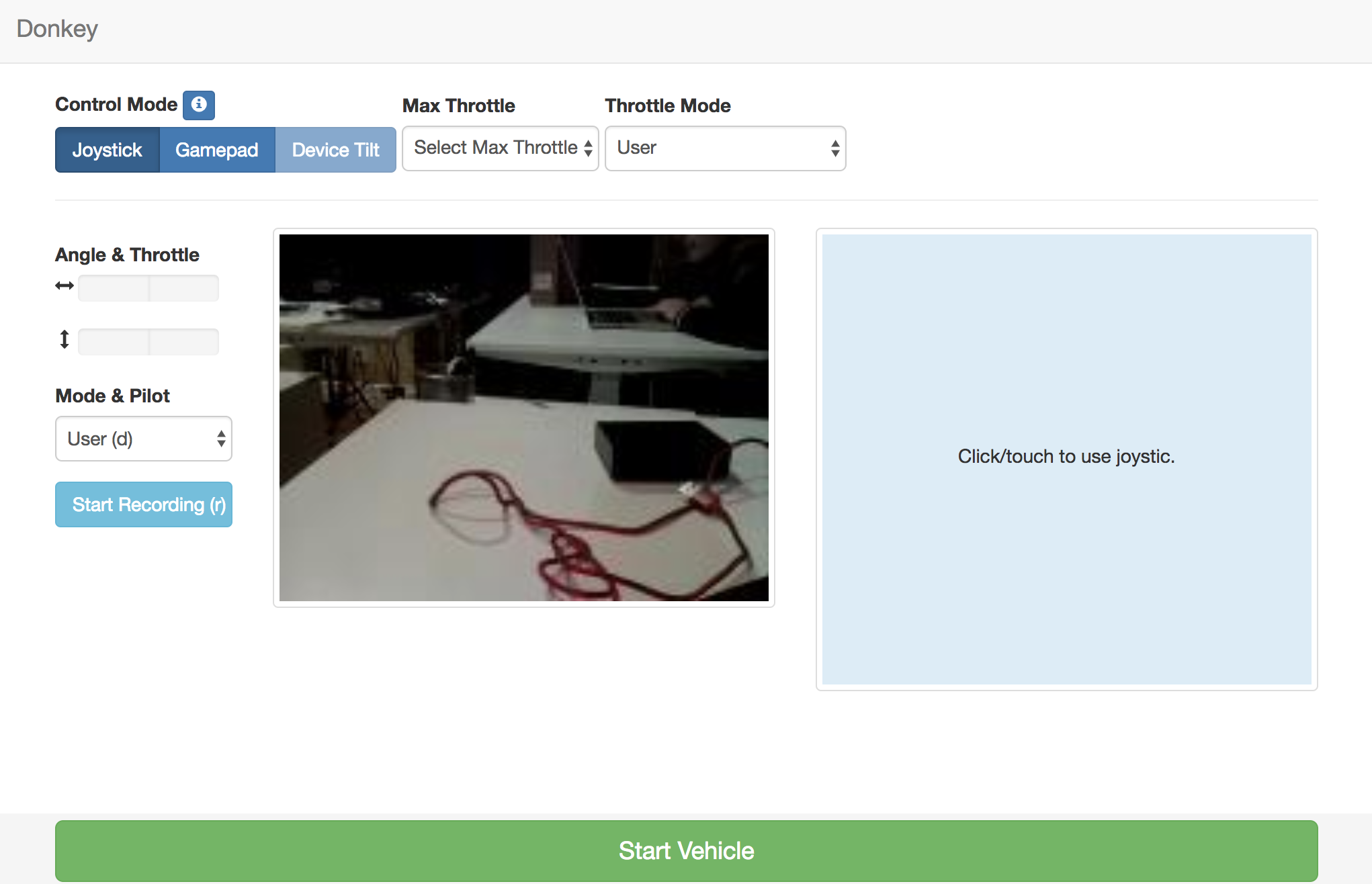
教師データの作成(RaspberryPi側)
$ cd ~/mycar
$ python manage.py drive
トレーニングデータは、~/mycar/data以下に保存される。
教師データの学習(Mac側)
教師データをRaspberryPiから、Macにrsyncする。
$ rsync -r pi@192.168.86.41:~/mycar/data/ ~/mycar/data/
$ ls data
tub_01_18-08-27 tub_02_18-08-27
Mac側には、tub_日付のフォルダが教師データ作成の度にふえていく。
$ donkey tubclean .
いらないデータを削除する。
$ python ~/mycar/manage.py train --tub=~/mycar/data/tub_01_18-08-27 --model=./models/mypilot
これで学習開始。
学習済みモデルをRaspberryPiに戻す
$ rsync -r ~/mycar/models/ pi@<your_ip_address>:~/mycar/models/
学習済みモデルでDonkeyを動かす
RaspberryPi側にログイン。
$ python manage.py drive --model ~/mycar/models/mypilot
or
Web画面のmodel & pilotから、autopilotを選ぶ。