LEGO 部品を利用した回転型倒立振子のレシピを公開!
- 第 1 回:組み立て
- 第 2 回:電子工作
- 第 3 回:運動方程式 ― MATLAB / Symbolic Math Toolbox
- 第 4 回:パラメータ同定 ― MATLAB / Simulink
- 第 5 回:現代制御 ― MATLAB / Simulink …… 未完成
- 第 6 回:アドバンスト制御 ― MATLAB / Simulink …… 未完成
おまけ
補足
1. はじめに
今回は,製作した回転型倒立振子に取り付けられている DC モータとロータリエンコーダを,マイコンシールド "MinSegShield M2V5" に接続する際に用いるケーブルを加工する手順を説明します.
なお,電子工作は自己責任でお願いしますね.
2. アームが取り付けられたモータの配線
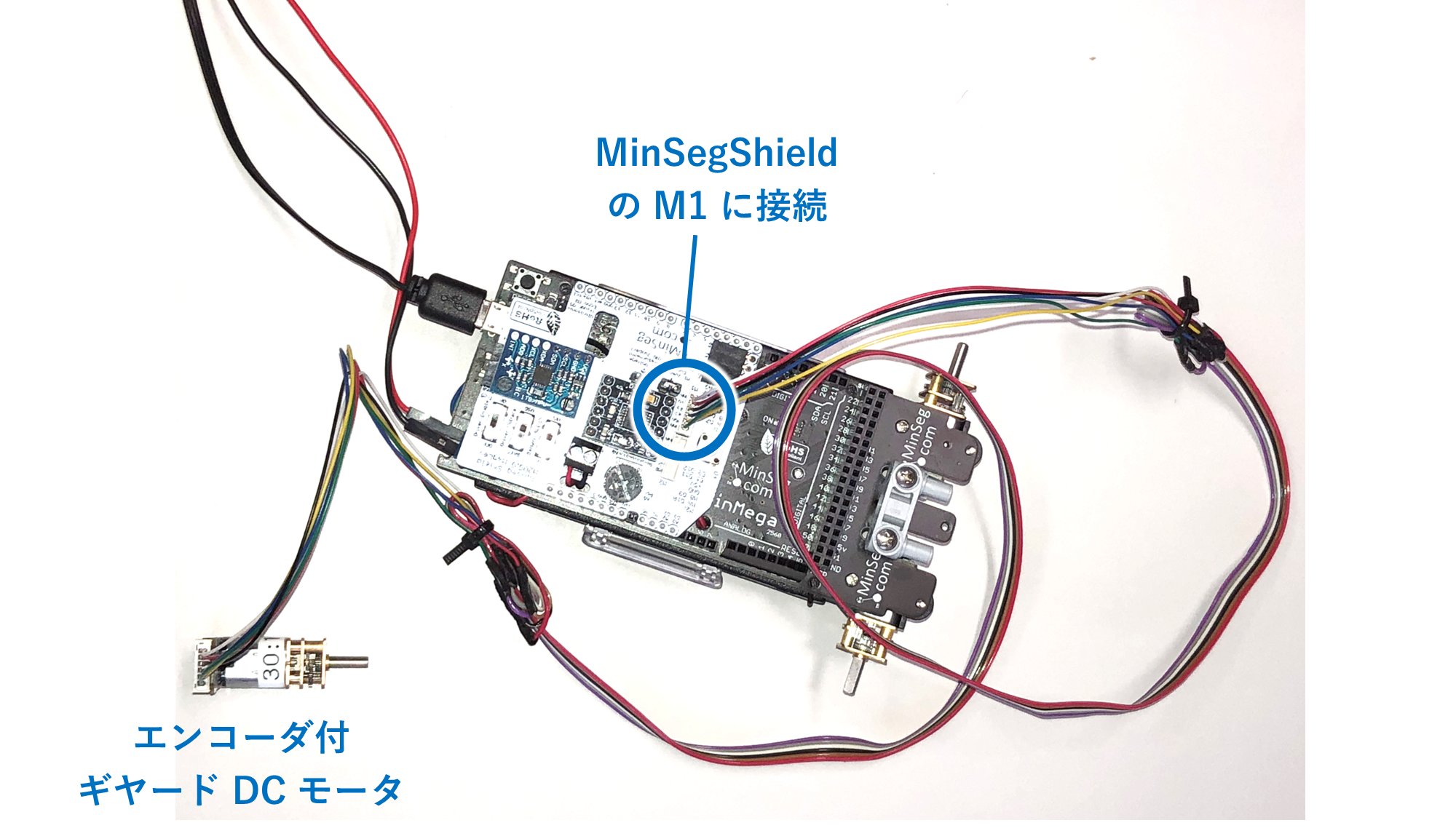
エンコーダ付きのギヤード DC モータとしては,DFRobot 社の FIT0481 (Micro Metal Geared motor w/Encoder - 6V 530RPM 30:1) を使用しています.
 |
|---|
| DFRobot 社のエンコーダ付きのギヤード DC モータ (FIT0481) |
それでは,ケーブルの加工をしていきます.
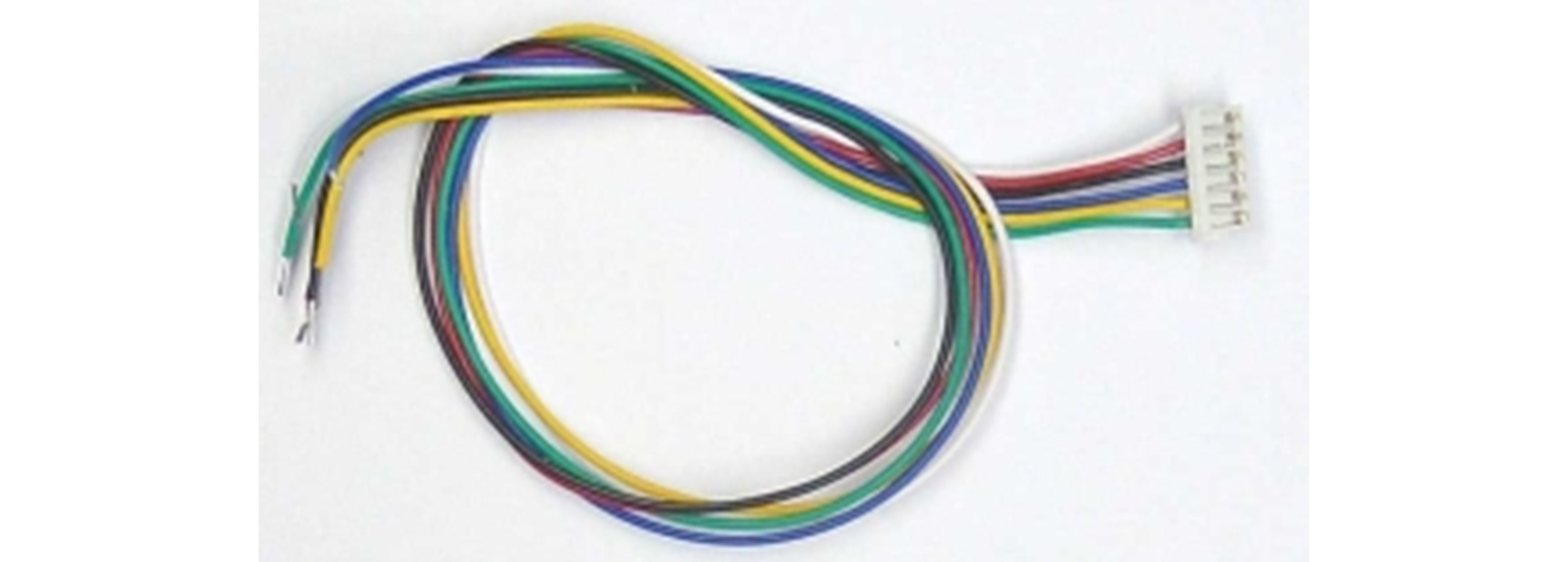
秋月電子通商さんからコネクタ付コード 6P (H) (通販コード:C-05719)を,3 本ほど購入してください.2 本はモータ部で,1 本は振子部で利用します.
 |
|---|
|
秋月電子通商さんから購入した「コネクタ付コード 6P (H)」 (通販コード:C-05719) |
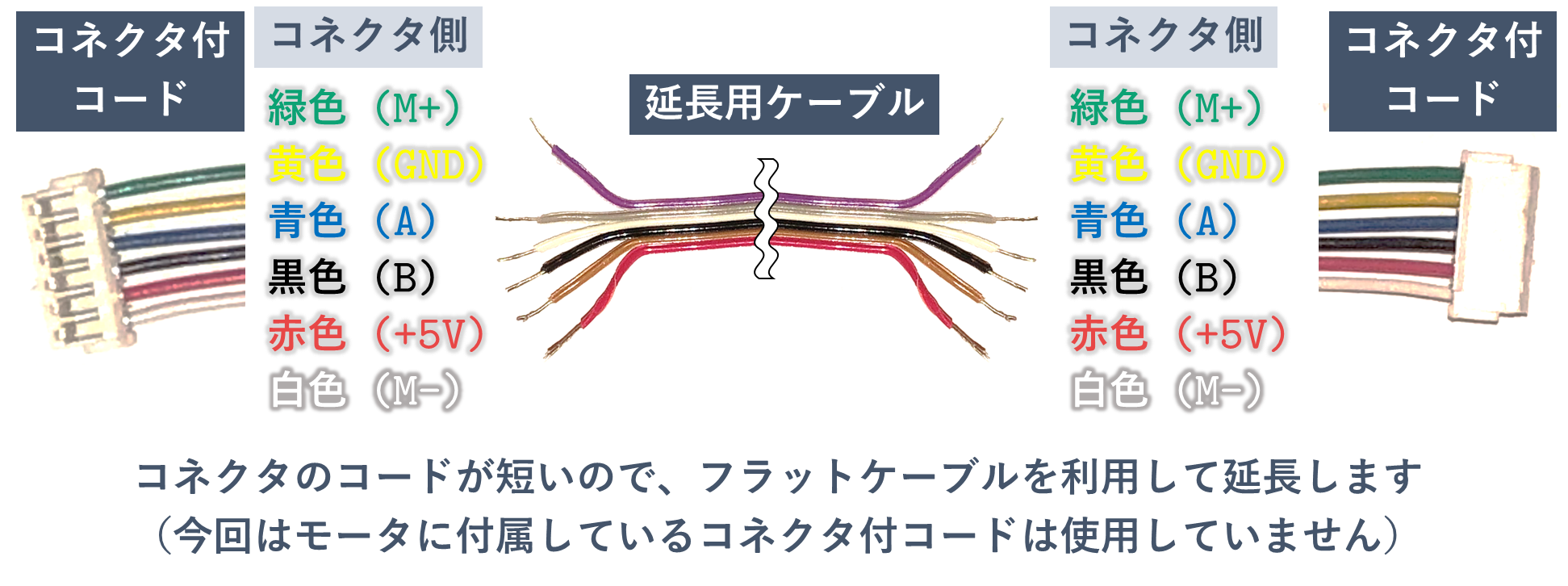
また,線を長くするために,1 m 程度の 6 芯の延長用ケーブルも用意してください.絶縁層が厚いものなどは硬くて負荷となってしまいますので,柔らかい素材のものをご使用ください.今回は,研究室にあったフラットケーブル(リボンケーブル)を使用しました.
つぎに,以下の手順で 2 本のコネクタ付コード 6P (H) を 1 m 程度の 6 芯のケーブルと接合します.
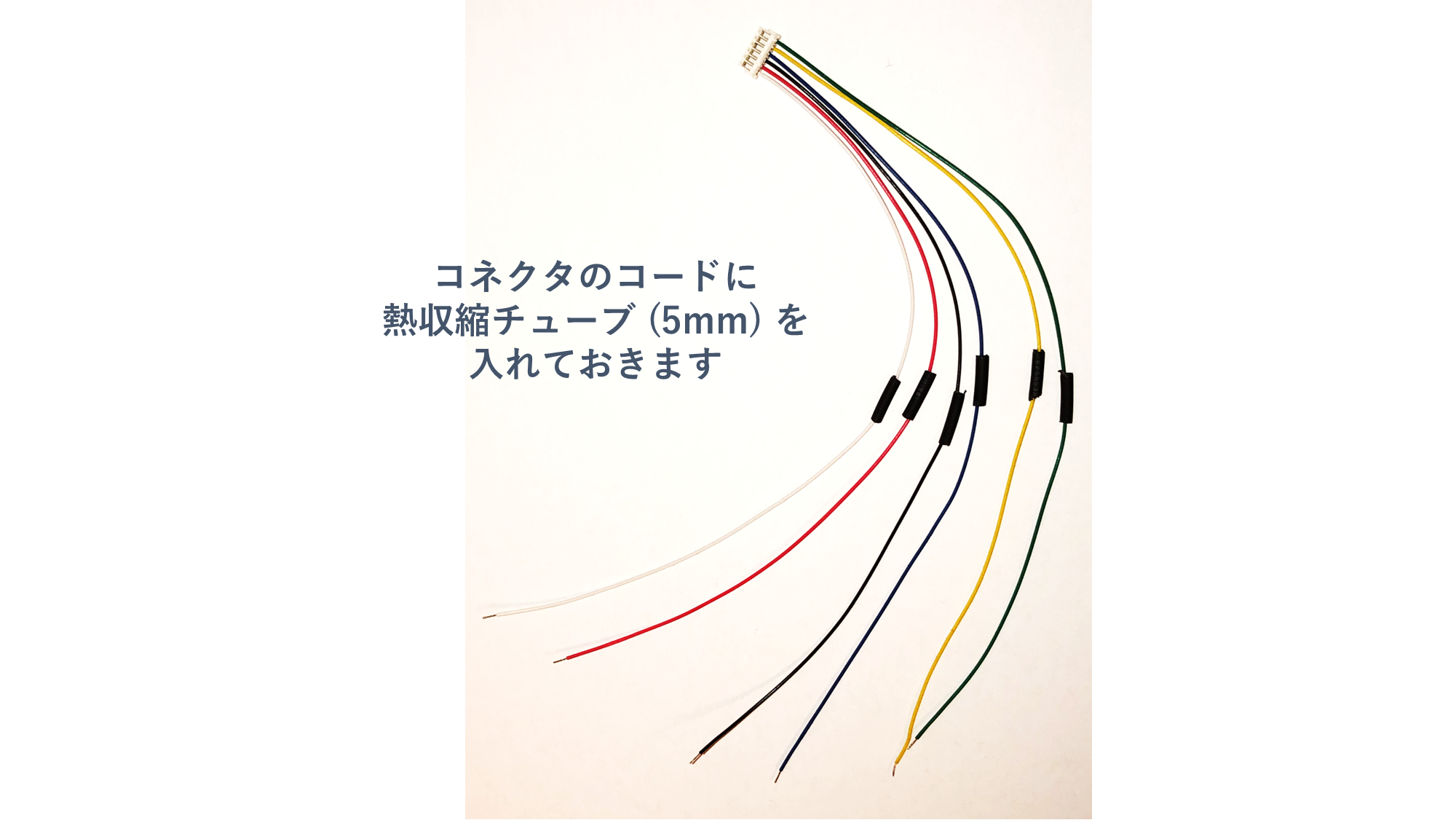
- 熱収縮チューブ (5mm) を 1 cm 程度の長さに切断します(12 個用意).
- コネクタ付コード に切断した熱収縮チューブを入れておきます.
-
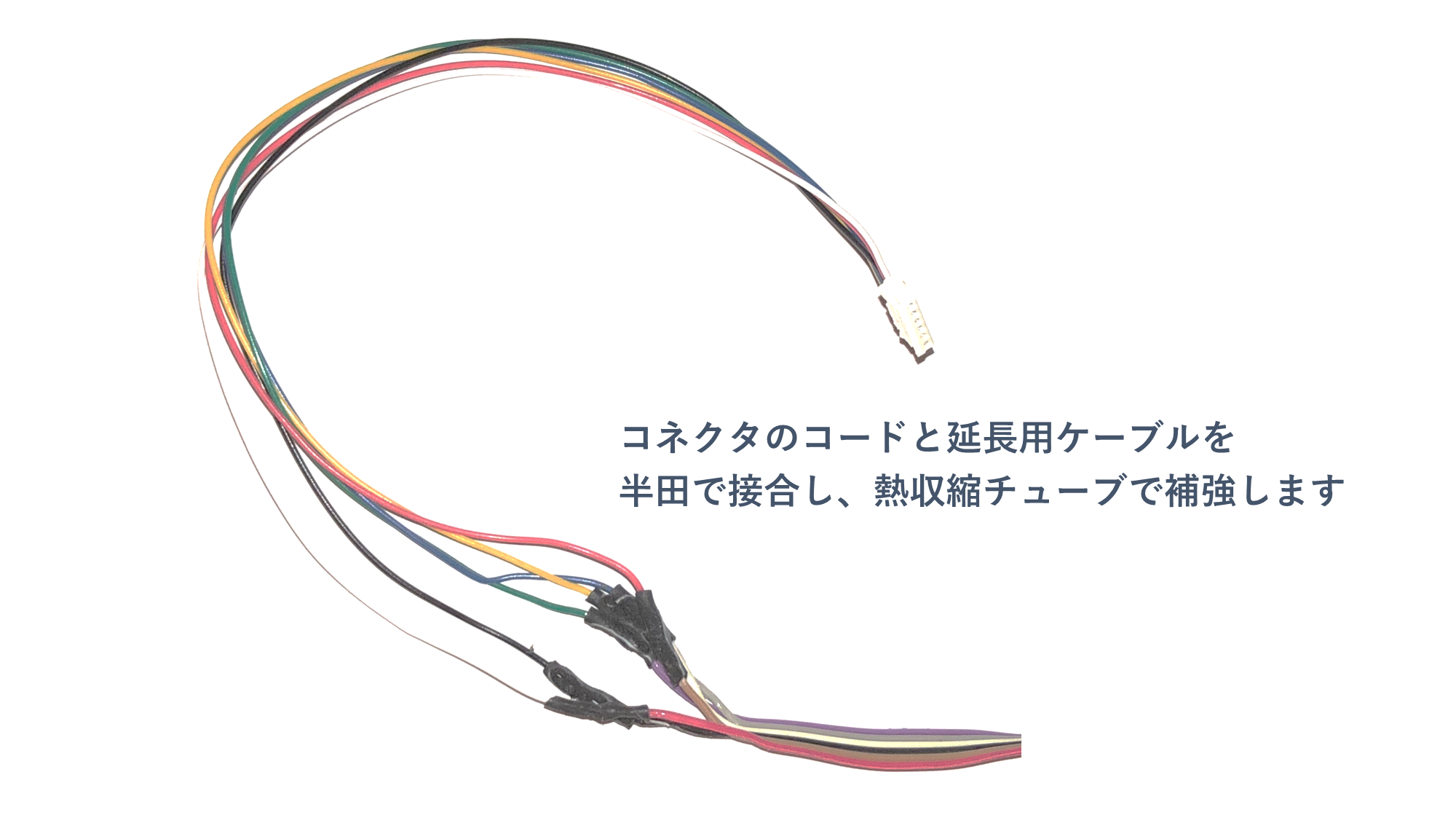
以下のように,半田で 2 本のコネクタ付コード を延長用ケーブルと接合します.
-
半田で接合したら,熱収縮チューブを接合部にずらします.そして,半田ごてをあててチューブを収縮させ,接合部を補強します.
-
さらに接合部を補強するため,ダイソーさんで購入した結束バンドで締め付けます.
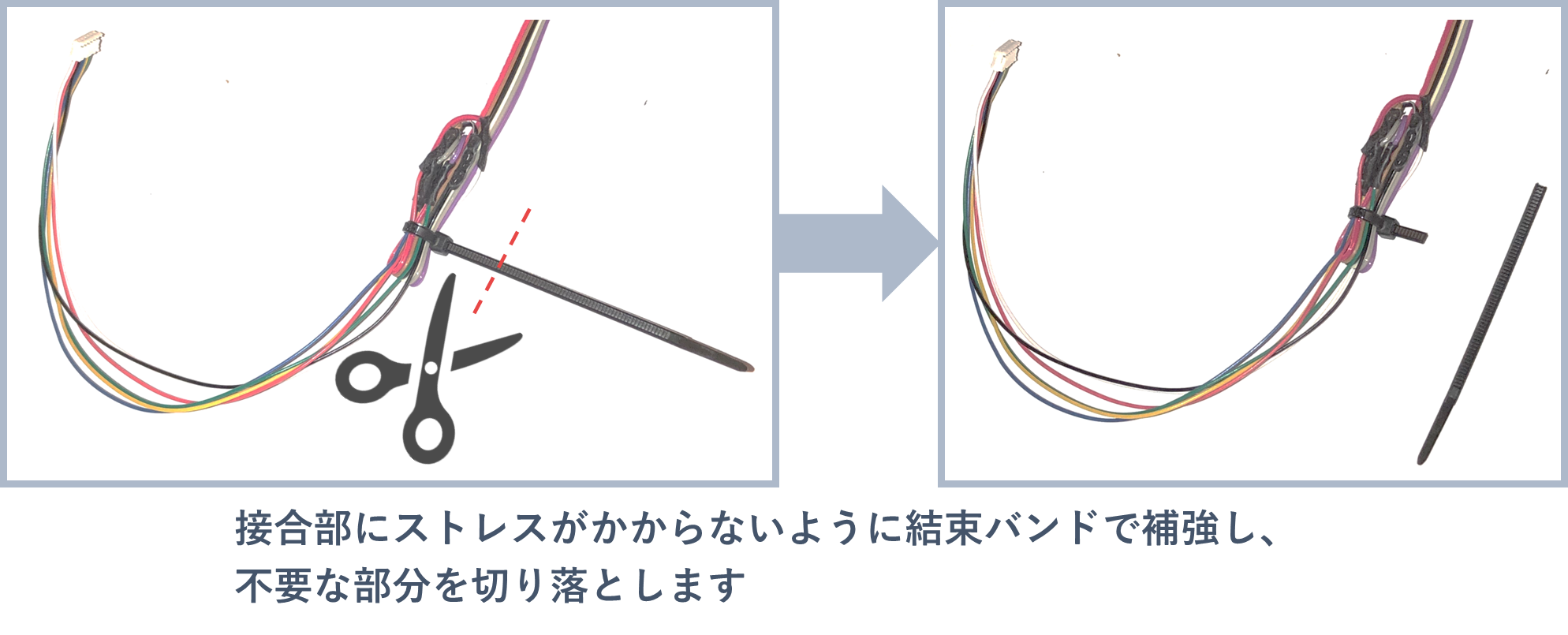
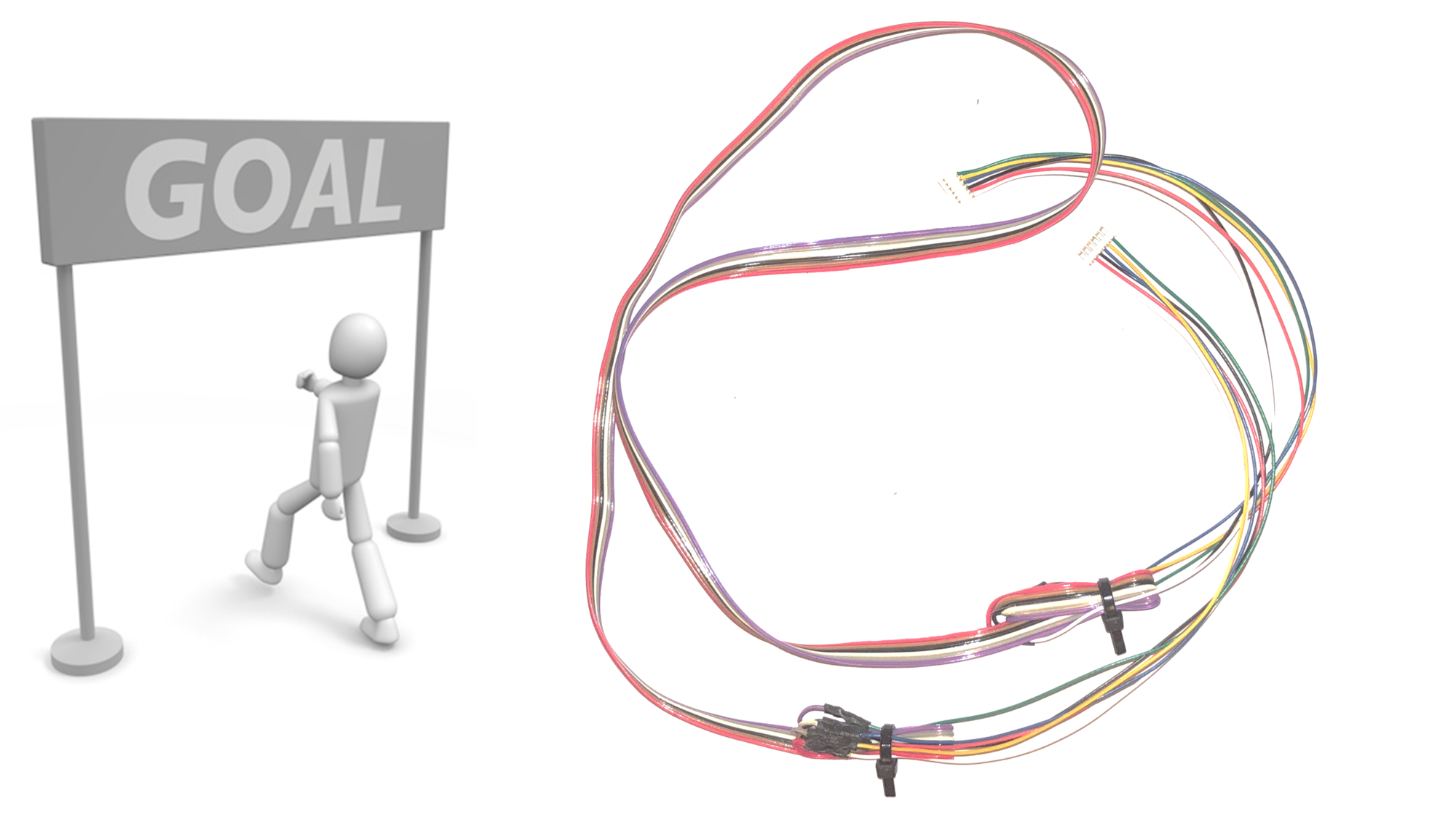
以上の作業により,モータ用のケーブルが完成しました.
最後に,作成したケーブルの両端(オスのコネクタ)を,
- マイコンシールド "MinSegShield M2V5" のメスのコネクタ M1
- ギヤード DC モータの後方にあるメスのコネクタ
に挿し込んでください.
3. 振子が取り付けられたエンコーダの配線
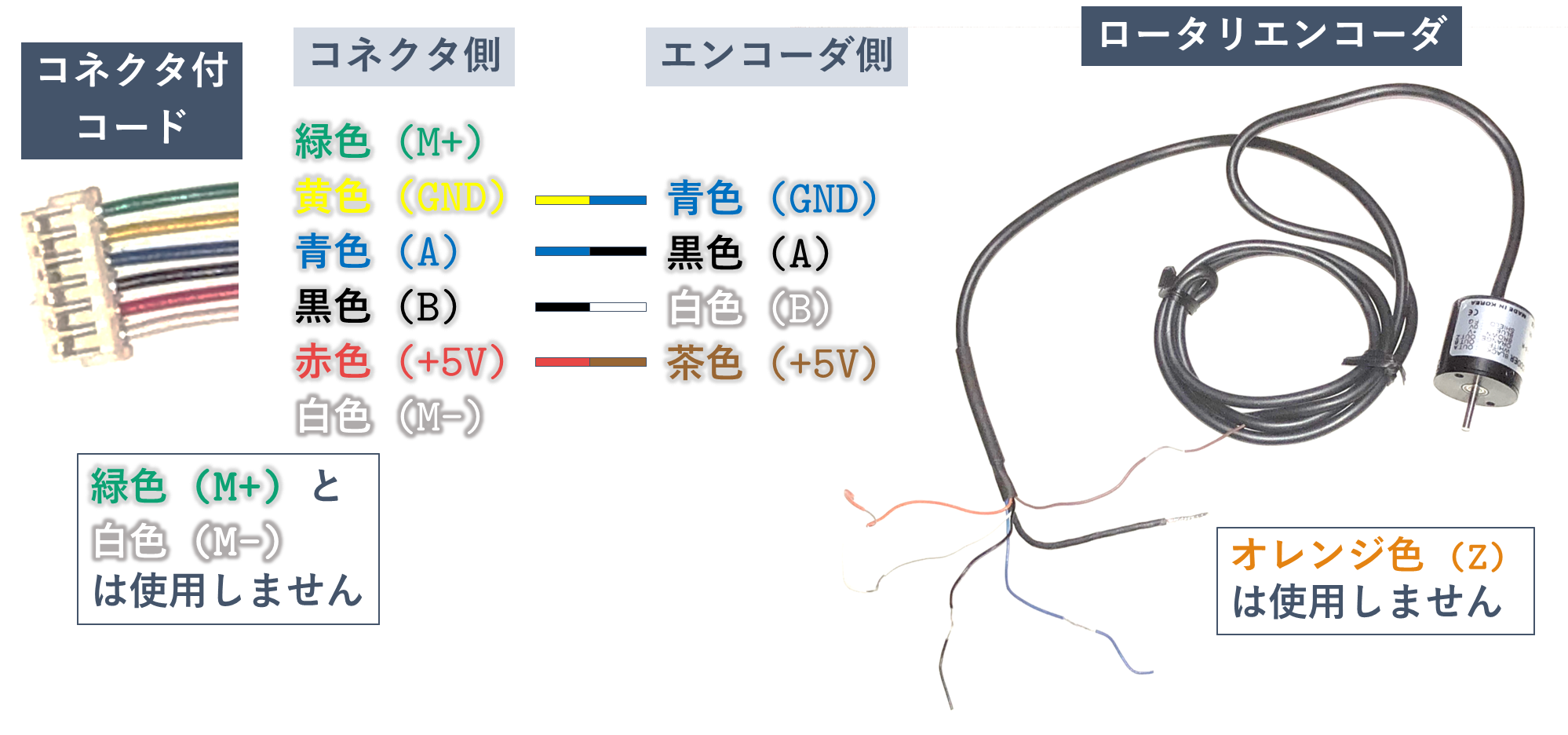
振子用の角度センサとしては,AUTONICS 社のロータリエンコーダ (E20S2-360-3-V-5-R) を使用しています.
 |
|---|
| AUTONICS 社のエンコーダ (E20S2-360-3-V-5-R) |
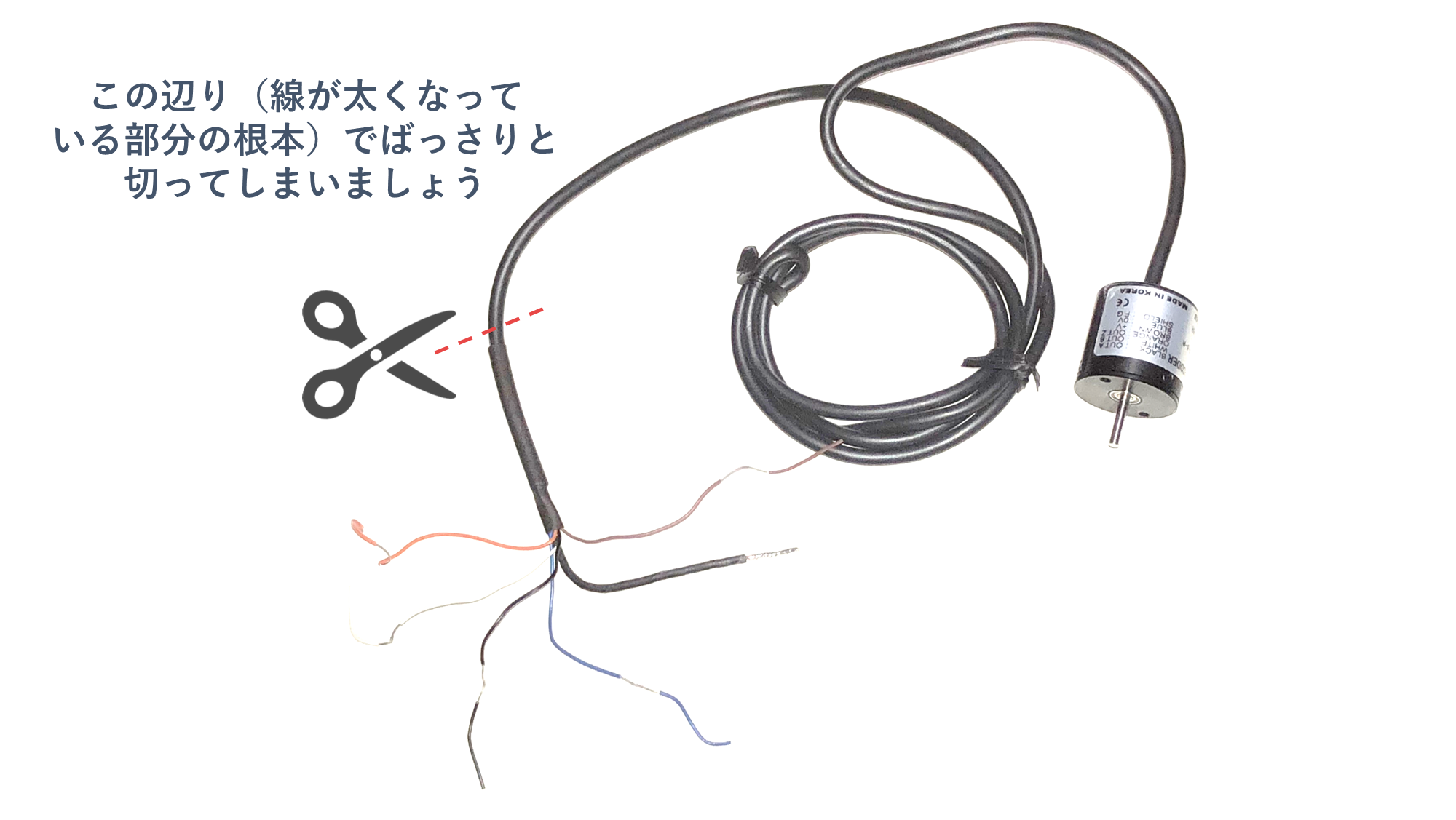
まず,エンコーダを箱から取り出してください.

Z 信号は使用しません.また,シールド線は外皮の内部では,網状の金属線となっています.
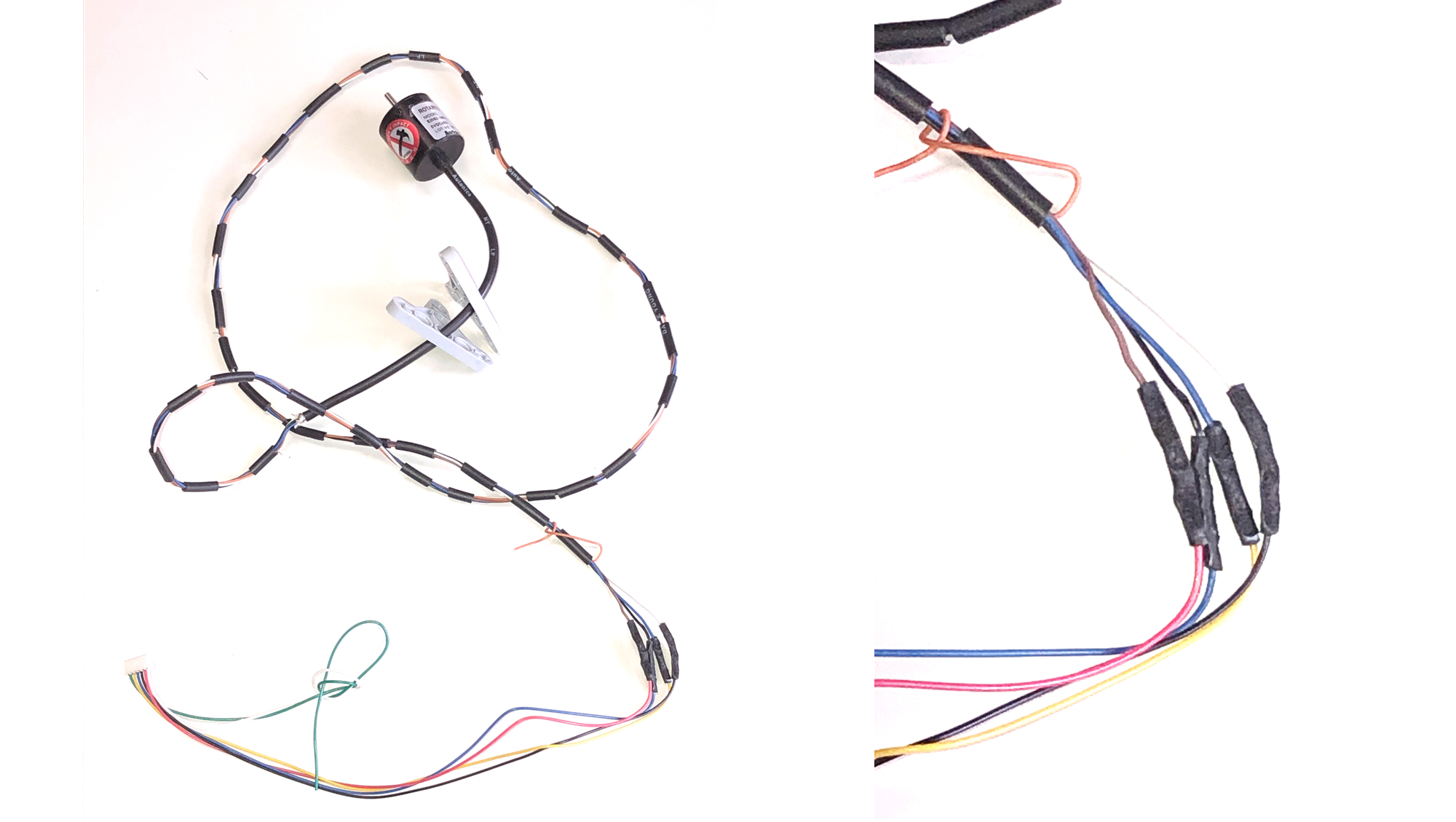
エンコーダのコードは硬いので,そのまま使用すると,アームを回転させたときに,バネのような反力を生じてしまいます.そこで,ワイヤーストリッパーで断片的(1 cm くらいごとに)に外皮部分を剥がします.
そのために,コードの先端部分を切り落とします.
そして,ワイヤーストリッパーの 2.0 mm の部分を利用し,コードの外皮を断片的に剥がしていきます.シールド部分(網状の金属線)は不要ですので,切り取ってください.

シールドはノイズを遮断する役割があります.しかし,本実験装置のモータは小型であり,アームを回転させたときの負荷になってしまう(バネのような反力を生じてしまう)ので,あえて使用しないことにします.
コードの外皮を半分程度を残し,以下のような感じにします.この段階で忘れずに LEGO 部品にコードを通しておいてください.

- 熱収縮チューブ (5mm) を 1 cm 程度の長さに切断します(4 個用意).
- コネクタ付コード(コネクタ側の内側 4 つ)に切断した熱収縮チューブを入れておきます.

-
以下のように,半田でコネクタ付コード をエンコーダのコードと接合します.
-
半田で接合したら,熱収縮チューブを接合部にずらします.そして,半田ごてをあててチューブを収縮させ,接合部を補強します.
- さらに接合部を補強するため,ダイソーさんで購入した結束バンドで締め付けます.
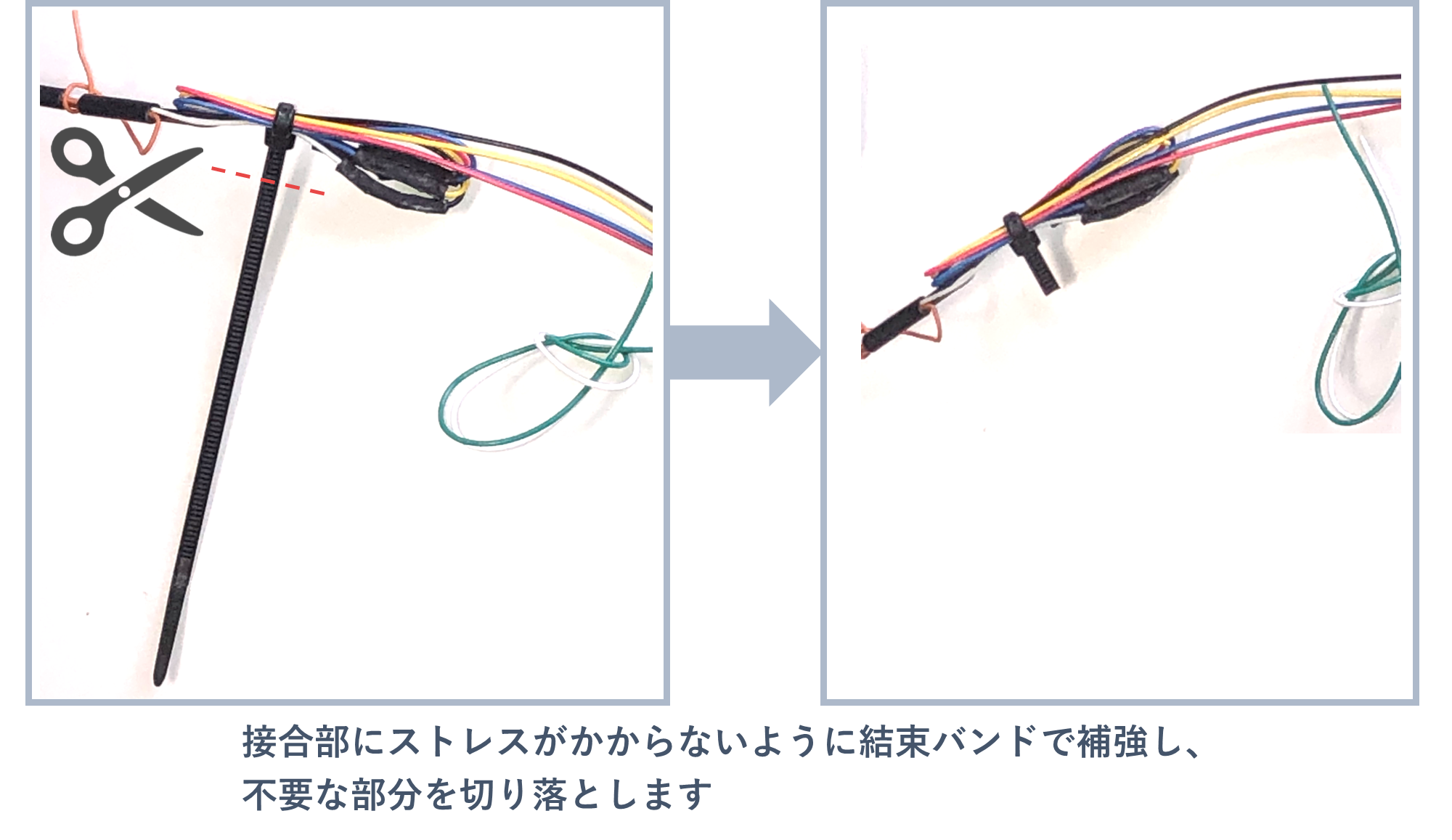
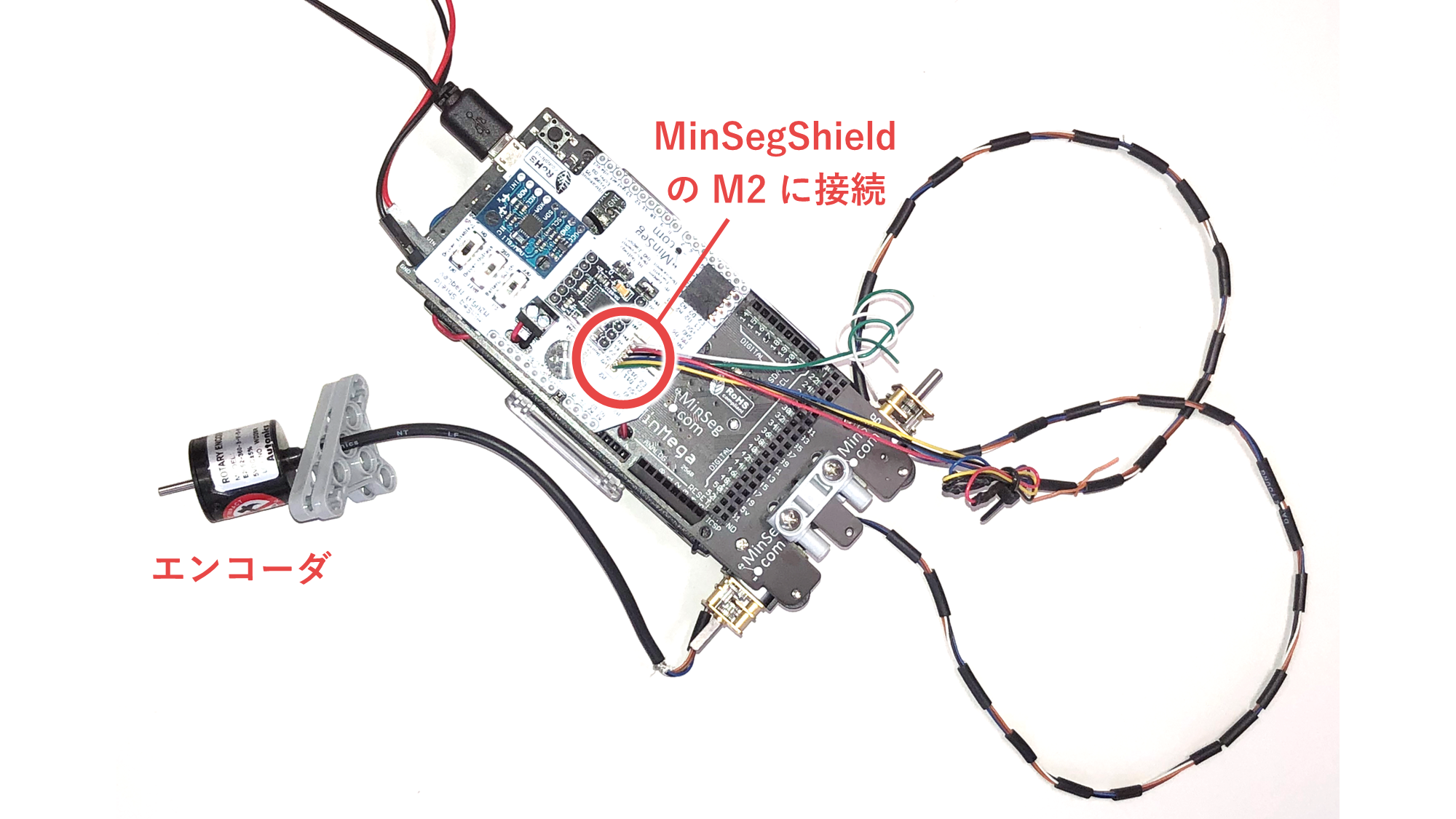
以上の作業により,エンコーダ用のケーブルが完成しました.
最後に,ケーブルの先端(オスのコネクタ)を,マイコンシールド "MinSegShield M2V5" のメスのコネクタ M2 に挿し込んでください.
4. おわりに
今回は,第 1 回で製作した回転型倒立振子に取り付けられている DC モータとロータリエンコーダとマイコンシールド "MinSegShield M2V5" を接続するために,ケーブルを加工する手順を説明しました.
次回は,完成した回転型倒立振子のパラメータ同定について説明します.
(終わり)