バーチャルロボット
Choregrapheでは バーチャルロボット を用いて、Pepper実機がなくても基本的な動作確認をおこなうことができます。

ここでは、バーチャルロボットを使用する上での制限について説明し、これまでのチュートリアルのうちバーチャルロボットのみでできるもの、できないものを紹介していきます。
バーチャルロボットへの接続方法
Choregraphe起動時、デフォルトではバーチャルロボットに接続した状態になります。
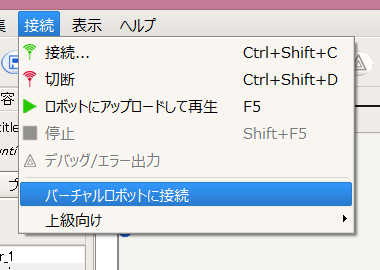
Pepper実機に接続した後など、明示的にバーチャルロボットに接続したい場合は、 [接続]メニューの[バーチャルロボットに接続]を選択します。
バーチャルロボットの制限
モーション関連の制限
Pepperにポーズをとらせたり、移動させたりといったことはバーチャルロボットにより動作確認をおこなうことができます。
| 項目 | バーチャルロボットでの使用 | 備考 |
|---|---|---|
| 各関節の制御 | ○ | ロボットビューで確認可能 |
| ホイールによる移動 | ○ | ロボットビューで確認可能 |
| 関節固定の制御 | × | アニメーションモードの使用や、モーションダイアログによる関節固定解除は実施不可 (参考: Pepperによるポーズ作成) |
また、バーチャルロボットにおいて、ロボットに対する重力の向きを変更(仮想空間上で横向きにするなど)はできません。
音声関連の制限
音声についてはダイアログパネルにより、テキストで代替可能な範囲のみ動作確認が可能です。
| 項目 | バーチャルロボットでの使用 | 備考 |
|---|---|---|
| しゃべる | ○ | ロボットビューまたはダイアログパネルにより確認可能 |
| しゃべる (アニメーションつき) | × | - |
| 聞き取り | △ | 言葉の聞き取りのみ、ダイアログパネルにより確認可能 |
| オーディオ再生 | △ | .wav, .ogg形式のみ再生可能(参考: ボックスの使い方:好きな音を鳴らす) |
| 音声録音 | × | - |
| 音声位置追跡 | × | - |
####
(参考)ダイアログパネルによるバーチャルロボットとの対話
バーチャルロボットではダイアログパネルを通じて文字列ベースで対話することができます。
バーチャルロボットで再生を実行したのち、ダイアログパネルに文字列を入力する[1] と、パネルに**[人間:]プロンプトとその内容が表示され、音声認識のAPIを介してバーチャルロボットに伝えられます。
また、バーチャルロボットがSayボックスなどによりしゃべった場合は、[ロボット:]プロンプトとしゃべった文字列[2]**が確認できます。
ただし、Speech Reco.ボックスの場合、Word listが考慮されない(以下のように、ダイアログパネルに入力された内容がそのまま出力される)などの制限があります。
ダイアログパネルで全体的な動きを確認することは可能ですが、Pepper実機の音声認識では異なった挙動になる可能性があります。


画像認識関連の制限
バーチャルロボットではカメラが機能しないため、画像認識に関する機能の動作確認はできません。
タブレット関連の制限
バーチャルロボットではタブレットに関する機能の動作確認はできません。
その他の制限
タッチセンサー、レーザー、ソナーなどの上記以外のセンサーに関する機能の動作確認はできません。
また、バーチャルロボットはLEDを持っていないため、目や耳を任意の色で光らせるといった動作確認はできません。
バーチャルロボットで実行可能なチュートリアル
-
Pepperチュートリアル (4):会話をする、音を鳴らす ※オーディオ再生、音のした方向の追跡を除く
-
HTTP Getボックスの作成 ※Animated Sayを除く
-
会話入門 (Pepper TechFes技術セッション) ※Animated Sayを除く
-
PepperアニメーションTips ※レコーディングモード、セーフティを除く
-
Dialogとメモリイベント (Dialog応用) ※ALFaceCharacteristics API連携を除く