Memo#
フレームワークやDNNを使ったことがなく、いろんなことを試す中で解った事柄をメモしています。日を追うごとに、PYNQと関係なくなってきてますが。
PYNQ-DNN#
OpenVINOは、Python記述から中間言語に変換し、HLSすることで実現しているらしい。OpenVINOについてはこちらで。
PYNQの場合は?
Board files to build Ultra96 PYNQ image
Petalinux2018.2 BSP for Ultra96
$ sudo pip3 install git+https://github.com/Xilinx/BNN-PYNQ.git (on PYNQ v2.3)
QNN on PYNQ using a MO architecture
$ sudo pip3 install git+https://github.com/Xilinx/QNN-MO-PYNQ.git
In Shimaharu's mind から勝手に引用。
恐らくだが、CNNやらPoolingやらの層はあらかじめHLSで生成したハードを使って、
層数とか特徴量のチャネル数はパラメータ(JSONに記述されている?)により
ネットワークが決まるようである。
確かにそんな感じがする。
{
"network": "tinier-yolo",
"input_image": "../../tests/Test_image/tinier-yolo/input.bin",
"verification_image": "../../tests/Test_image/tinier-yolo/verification.bin",
"binparam": "binparam-tinier-yolo-nopool",
"use_binparams" : true,
"binparam_skip": 1,
"layer_skip": 0,
"layers": [{
"name": "conv1",
"func": "conv_layer",
"input_bits": 3,
"output_bits": 3,
"weight_bits": 1,
"threshold_bits": 16,
"kernel_shape": 3,
"kernel_stride": 1,
"input_channels": 16,
"input": [16, 208, 208],
"output_channels": 64,
"output": [64, 208, 208],
"padding": 1
},
{
"name": "pool1",
"func": "maxpool_layer",
"input_bits": 3,
"output_bits": 3,
"kernel_shape": 2,
"kernel_stride": 2,
"input_channels": 64,
"input": [64, 208, 208],
"output_channels": 64,
"output": [64, 104, 104],
"padding": 0
},
途中割愛
{
"name": "end",
"func": "none"
}
]
}
詳しくは、よくわからない・・・
Ultra96-PYNQを自分でビルドする#
@okuhata さんの記事です。
ZCU102向けPYNQビルド備忘録#
@jin0g さんの記事です。
PYNQ LinuxイメージのSDカードへの書き込み#
$ sudo mkfs -t vfat -F 32 /dev/sdb1
$ sudo mkfs -t ext4 /dev/sdb2
$ sudo mlabel -i /dev/sdb1 ::BOOT
$ sudo e2label /dev/sdb2 ROOTFS
$ sudo mount /dev/sdb1 /mnt
$ sudo cp BOOT.BIN image.ub /mnt
$ sudo sync
$ sudo umount /mnt
$ sudo dd if=rootfs.ext4 of=/dev/sdb2 bs=1M status=progress
$ sudo e2fsck -f /dev/sdb2
$ sudo resize2fs -p /dev/sdb2 {7G}
Darknet#
FPGA Magazineを参考にして、Darknetを試してみる。
Pjreddie(本家?)Yolo v3##
$ git clone https://github.com/pjreddie/darknet
$ cd darknet
$ vi Makefile
OPENCV=1
CFLAGS = ... -pg
$ make
$ wget https://pjreddie.com/media/files/yolov3.weights
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/people_dog.jpg
Input JPEG

Predictions JPG
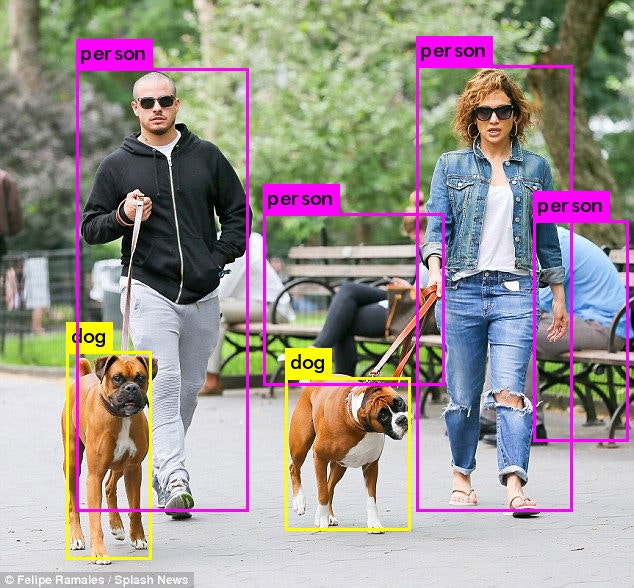
Pjreddie(本家?)Yolo v3 Tiny##
$ wget https://pjreddie.com/media/files/yolov3-tiny.weights
$ ./darknet detect cfg/yolov3-tiny.cfg yolov3-tiny.weights data/people_dog.jpg
Predictions JPG
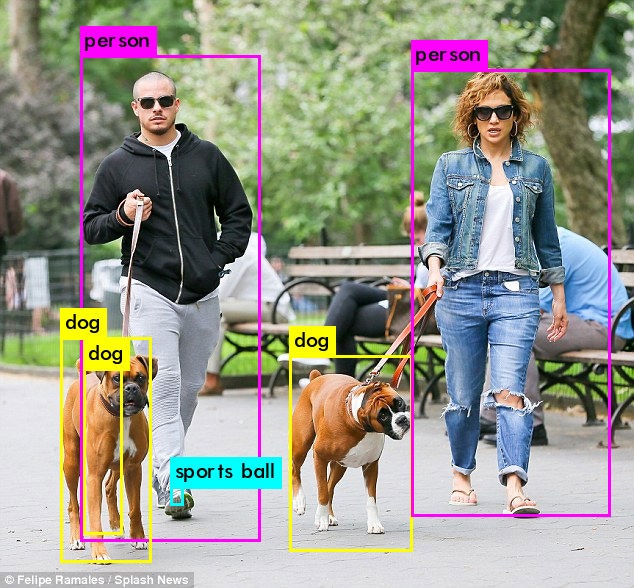
靴先を野球ボールとだと認識してる。
Giuliogamba(forked from Pjreddie)Yolo v2##
$ git clone https://github.com/giuliogamba/darknet.git
$ wget https://pjreddie.com/media/files/yolov2-voc.weights
$ wget https://pjreddie.com/media/files/yolo-voc.weights
AlexeyAB(forked from Pjreddie)Yolo v3##
このForkは、動画ファイル(mp4)やWebカメラでも動作した。
$ git clone https://github.com/AlexeyAB/darknet.git
GPU、cuDNNを有効にして
$ vi Makefile
OPENCV=1
GPU=1
CUDNN=1
$ make
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/people_dog.jpg
Predictions JPG
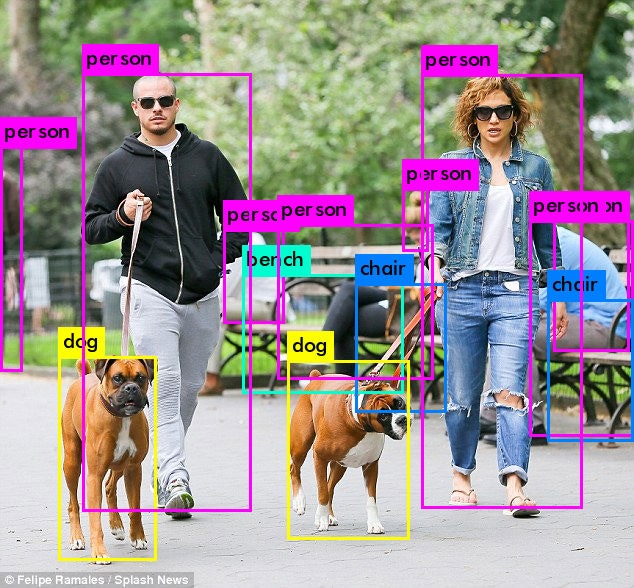
後ろの人やベンチも認識している。
CPUだけ、GPUを有効、cuDNNも有効にした場合の処理時間の違いを。
NVidiaボードは古~いQuadro。
$ ./darknetCPU detect cfg/yolov3.cfg yolov3.weights data/People_Dog.jpg
data/People_Dog.jpg: Predicted in 19813.975000 milli-seconds.
$ ./darknetGPU detect cfg/yolov3.cfg yolov3.weights data/People_Dog.jpg
data/People_Dog.jpg: Predicted in 505.077000 milli-seconds.
$ ./darknetCUDNN detect cfg/yolov3.cfg yolov3.weights data/People_Dog.jpg
data/People_Dog.jpg: Predicted in 299.481000 milli-seconds.
40倍以上、高速になった。
澁谷のゾンビ行進の画像で試してみると、皆Personです、当然といえば当然。![]()
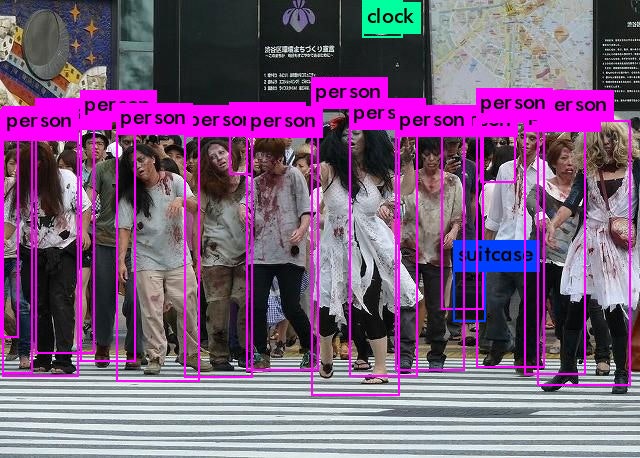
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights -dont_show data/hoge.mp4 -i 0 -out_filename res.avi
AlexeyABのYolo v3で、動画ファイルを試してみた。 pic.twitter.com/TRUPr6ugyi
— yka2ki (@yka2ki) 2019年2月23日
3fpsぐらいだったので、それならWebカメラでカクカク映像が見れるかも。
./darknet detector demo cfg/coco.data cfg/yolov3.cfg yolov3.weights
準備中
Jupyter Notebook Viewer#
GitのJupyter Notebookを手っ取り早く見るためには便利
Linux上で画像ファイルの表示#
apt updateしてなかったからか、Ubuntuに入っていなかったので。
$ sudo apt install imagemagick
$ display predictions.jpg
Ubuntu16.04にUSB Webカメラを繋ぐ#
Webカメラからの映像を表示するアプリCheeseを起動しても、Webカメラにアクセスできませんでした。デバイスファイル/dev/video0へのアクセスにはroot権限が要るらしく、setfaclコマンドでアクセス制御を設定することで、表示できるようになりました。
sudo chmod 660 /dev/video0
sudo chgrp video /dev/video0
sudo setfacl -m u:自分のアカウント:rw /dev/video0
setfaclコマンドなるものを、初めて知った・・・
Ubuntu16.04にNVidiaドライバとCUDA9.0をインストール#
Google Colaboratoryで試してみる#
作成中


./People_Dog.jpg: Predicted in 281.701000 milli-seconds.

cvWriteFrame
1;1H
FPS:16.4
Objects:
person: 100%
person: 100%
person: 99% Stream closed.
person: 99%
person: 98%
person: 96%
person: 75%
person: 74%
person: 69%
person: 68%
person: 45%
Darknetの処理時間の可視化#
Interfaceの記事をたよりに、Darknetの処理時間のプロファイルを取ってみた。
$ vi Makefile
OPENCV=1
GPU=1
CUDNN=1
CFLAGS = ... -pg
$ make
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/people_dog.jpg
$ gprof darknet | ./gprof2dot.py | dot -Tpng -o profile.png
gprof2dot.pyは以下からゲットする。
$ git clone https://github.com/jrfonseca/gprof2dot
Ubuntu上でGPUを使った場合のプロファイルは###

Google Colabo上でGPUを使った場合のプロファイルは###

Ubuntu上でCPUを使った場合のプロファイルは###

Ultra96のPSだけで処理した場合のプロファイルは###

処理時間は、
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/People_Dog.jpg
data/People_Dog.jpg: Predicted in 120869.165000 milli-seconds.
dotが入ってなかったのでインストールする。Ubuntuであれば、以下のようなaptでインストールできますが
$ sudo apt install graphviz
Ultra96のPetalinux BSPで作ったLinuxは、Ubuntuではないのでaptできず、ソースをダウンロードしてコンパイル、インストールする。
$ wget https://graphviz.gitlab.io/pub/graphviz/stable/SOURCES/graphviz.tar.gz
$ tar zxvf graphviz.tar.gz
$ cd graphviz-2.40.1
$ ./configure
$ make
$ sudo make install
わざわざUltra96上でdot変換する必要はないけど、Memoとして。
Ultra96のXwindowをPC上に表示#
処理結果の画像を表示して確認するために、
わざわざディスプレイを繋ぐのが場所もとるし面倒なので、
SSHでloginし、XwindowアプリをPC上に表示できるようにした。
PC上ではCygwinを使っているので、
CygwinによるXWindowsの利用等を参考にしてXサーバーをインストールし、
$ echo $DISPLAY
localhost:0.0
$ export DISPLAY=:0.0
$ echo $DISPLAY
:0.0
$ ssh -l root -Y 192.168.3.11
root@ultra96:~ # echo $DISPLAY
localhost:10.0
root@ultra96:~ # xterm

取り敢えずここまで。