STM32CubeIDEを使ってみよう How To STM32CubeIDE 日本語版 (8) I2Cを使ってみよう1の続きです。
https://qiita.com/usashirou/items/0a67b6cbb541cf1cbe4f
今回は、Si7020温湿度センサーの情報を見てみましょう。
まずは、設定をしましょう。
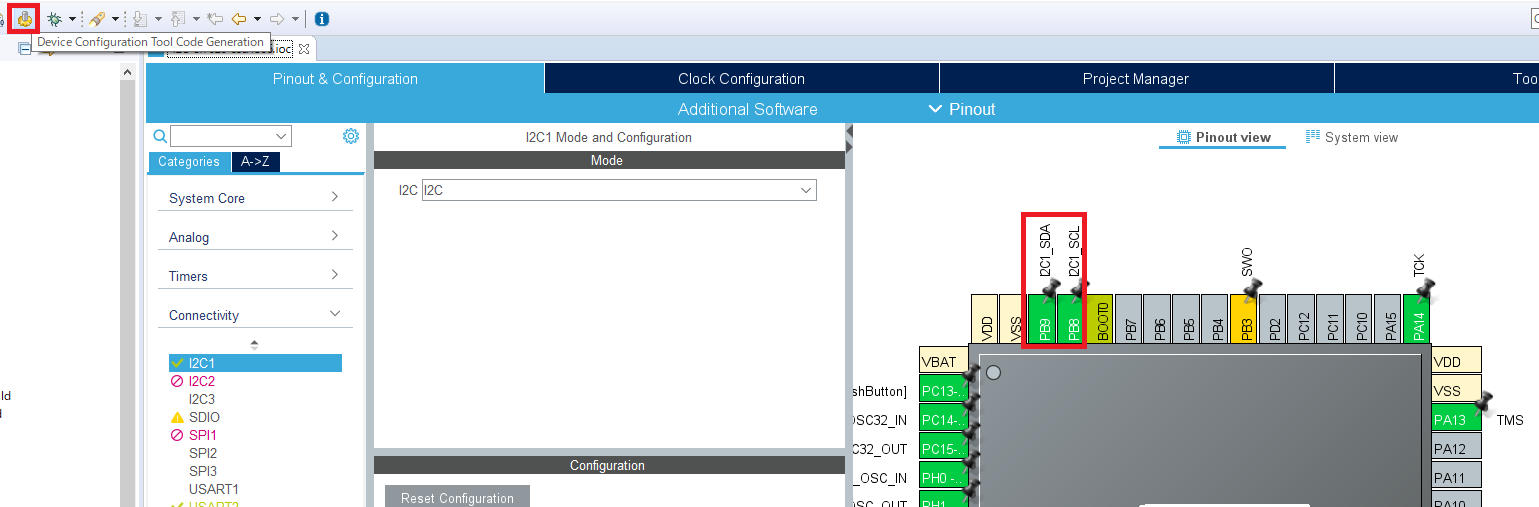
新規プロジェクトを立ち上げてI2Cの設定をします。
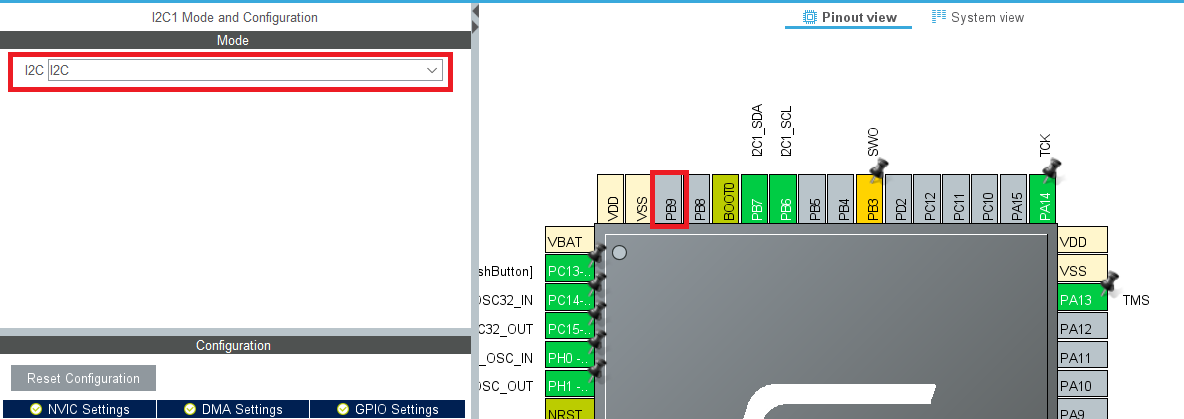
I2C1をI2Cにします。
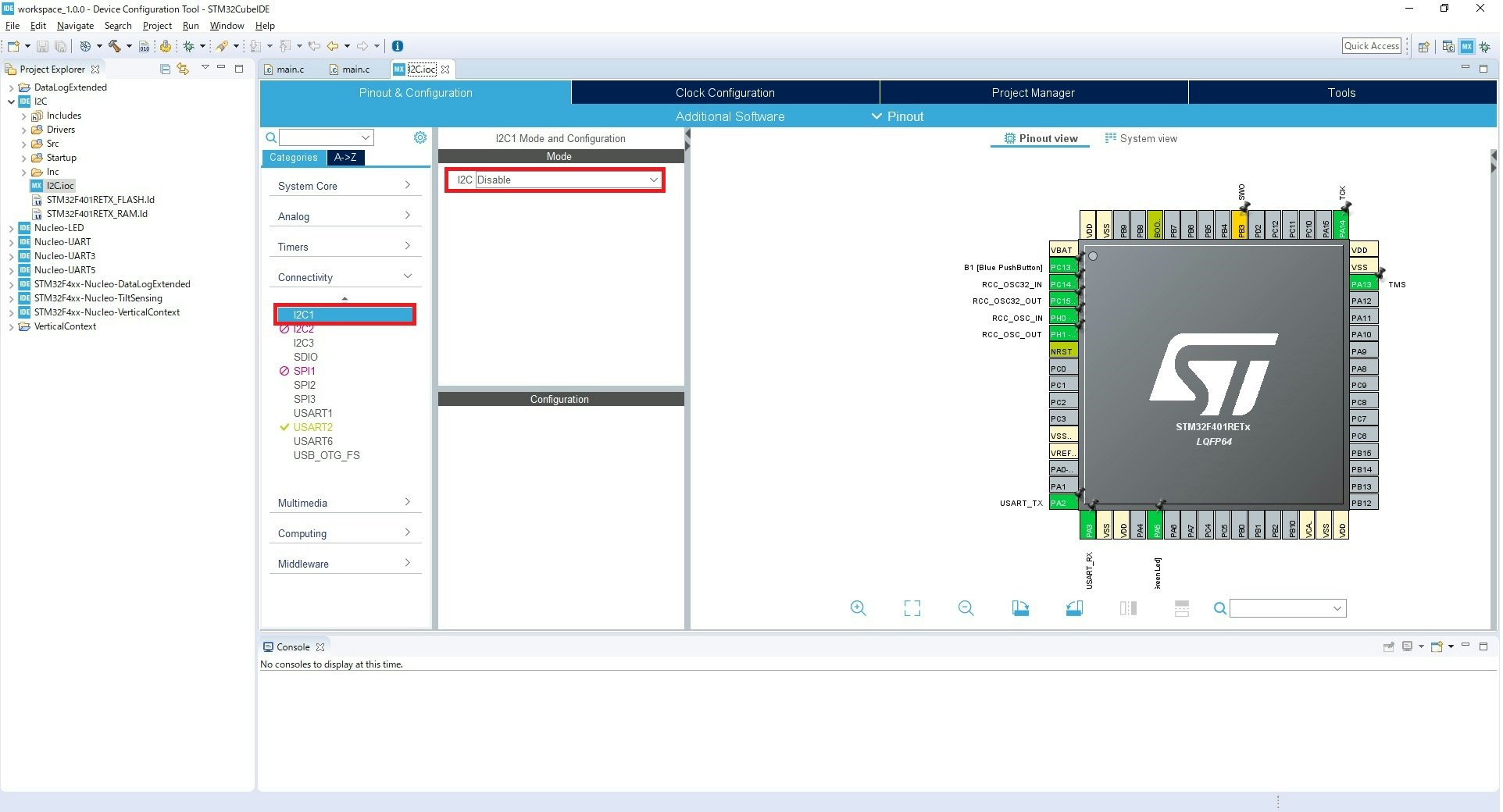
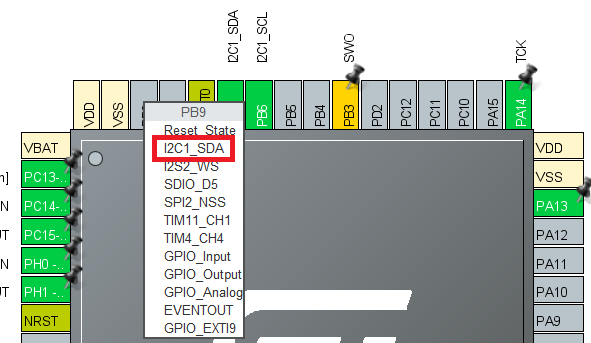
PB8,PB9にI2CのSCLとSDAが割り当てます。
それでは、CodeGenerateしましょう。
次に、main.cにプログラムを追加します。
63行目
/* USER CODE BEGIN 0 */
/* Direct printf to output somewhere */
# ifdef __GNUC__
# define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
# else
# define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
# endif /* __GNUC__ */
# ifndef __UUID_H
# define __UUID_H
//#define STM32_UUID ((uint32_t *)0x1FF0F420)
# define STM32_UUID ((uint32_t *)UID_BASE)
# endif //__UUID_H
/* USER CODE END 0 */
268行目
/* USER CODE BEGIN 4 */
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART2 and Loop until the end of transmission */
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 4 */
111行目
printf("UART TEST\r\n");
起動すると、TeraTermなどで以下出力が表示されると思います。
それでは、I2Cのコードを記述しましょう。
まずは、Si7020のI2Cアドレス0x40に0xF5を送信し、湿度を入手します。
なお、I2Cアドレスの0x40は7bit表記となり、1ビットシフトし8bit表記とします。
static const u_int8_t si7020_ADDR = 0x40<< 1;
こうしないとSTM32CubeIDEでは動きません。
(これを理解するまでにすごい時間がかかりました・・・)
HAL_I2C_Master_Transmit(hi2c, DevAddress, pData, Size, Timeout)
DevAddressには、先ほどの0x40<< 1であるsi7020_ADDR を
pDataには、0xF5を、Sizeは1バイトなので1とします。
(Measure Relative Humidity, No Hold Master Mode 0xF5)
static const u_int8_t REG_HUM = 0xF5 ;
reg[0] = REG_HUM;
HAL_I2C_Master_Transmit(&hi2c1, si7020_ADDR,reg,1, 1000);
となります。
次に、データを受信します。
HAL_I2C_Master_Receive(hi2c, DevAddress, pData, Size, Timeout)
pDataには、tmpとしましょう。
ここで受け取るサイズは2バイトになります。
HAL_I2C_Master_Receive(&hi2c1, si7020_ADDR,tmp,2,1000 );
次に受け取ったtmpを湿度に変換します。
変換式は以下です。
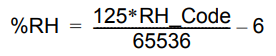
2バイトなので1バイトずつにして、計算します。
humidity = (((tmp[0] * 256 + tmp[1]) * 125.0) / 65536.0) - 6)
このままでは出力できないので、sprintfのhumの中に入れてあげます。
さらに、10倍して、さらに10分の1にすることで小数点以下を割り切れないものをあまりとして、出力できます。
これで小数点以下1桁を表示することでが可能になります。
(2桁にすると、xx.0xの時の0が表示されません・・・)
以下、プログラムを入れていきます。
26行目に以下を入れます
# include <stdio.h>
50行目には以下を入れます。
/* USER CODE BEGIN PV */
static const u_int8_t si7020_ADDR = 0x40<< 1;
static const u_int8_t REG_HUM = 0xF5 ;
uint8_t reg[12];
char tmp[2];
float humidity;
uint8_t hum[12];
/* USER CODE END PV */
125行目からに以下を入れます。
reg[0] = REG_HUM;
HAL_I2C_Master_Transmit(&hi2c1, si7020_ADDR,reg,1, 1000);
HAL_Delay(500);
HAL_I2C_Master_Receive(&hi2c1, si7020_ADDR,tmp,2,1000 );
humidity = ((((tmp[0] * 256 + tmp[1]) * 125.0) / 65536.0) - 6)*10;
sprintf((char*)hum,"%u.%u RH\r\n",
((unsigned int)humidity / 10),
((unsigned int)humidity % 10));
printf(hum);
HAL_Delay(500);
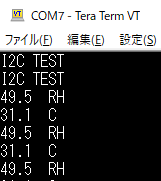
すると以下のような出力を得られると思います。

次は、温度を表示しましょう。
温度を知るには、
HAL_I2C_Master_Transmit(hi2c, DevAddress, pData, Size, Timeout)
でF3を送る必要があります。
(Measure Temperature, No Hold Master Mode 0xF3)
static const u_int8_t REG_TEMP = 0xF3 ;
プログラムは湿度とほぼ同じものとなります。
フルプログラムです。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2019 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
# include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
//#include <string.h>
# include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
I2C_HandleTypeDef hi2c1;
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
static const u_int8_t si7020_ADDR = 0x40<< 1;
static const u_int8_t REG_HUM = 0xF5 ;
static const u_int8_t REG_TEMP = 0xF3 ;
uint8_t reg[12];
char tmp[2];
float humidity;
uint8_t hum[12];
float temp;
uint8_t utemp[12];
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_I2C1_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* Direct printf to output somewhere */
# ifdef __GNUC__
# define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
# else
# define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
# endif /* __GNUC__ */
# ifndef __UUID_H
# define __UUID_H
//#define STM32_UUID ((uint32_t *)0x1FF0F420)
# define STM32_UUID ((uint32_t *)UID_BASE)
# endif //__UUID_H
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
MX_I2C1_Init();
/* USER CODE BEGIN 2 */
printf("I2C TEST\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
reg[0] = REG_HUM;
HAL_I2C_Master_Transmit(&hi2c1, si7020_ADDR,reg,1, 1000);
HAL_Delay(500);
HAL_I2C_Master_Receive(&hi2c1, si7020_ADDR,tmp,2,1000 );
humidity = ((((tmp[0] * 256 + tmp[1]) * 125.0) / 65536.0) - 6)*10;
sprintf((char*)hum,"%u.%u RH\r\n",
((unsigned int)humidity / 10),
((unsigned int)humidity % 10));
printf(hum);
HAL_Delay(500);
reg[0] = REG_TEMP;
HAL_I2C_Master_Transmit(&hi2c1, si7020_ADDR,reg,1, 1000);
HAL_Delay(500);
HAL_I2C_Master_Receive(&hi2c1, si7020_ADDR,tmp,2,1000 );
temp = ((((tmp[0] * 256 + tmp[1]) * 175.72) / 65536.0) - 46.85)*10;
sprintf((char*)utemp,"%u.%u C\r\n",
((unsigned int)temp / 10),
((unsigned int)temp % 10));
printf(utemp);
HAL_Delay(500);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE2);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 16;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE BEGIN I2C1_Init 0 */
/* USER CODE END I2C1_Init 0 */
/* USER CODE BEGIN I2C1_Init 1 */
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LD2_Pin */
GPIO_InitStruct.Pin = LD2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LD2_GPIO_Port, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/**
* @brief Retargets the C library printf function to the USART.
* @param None
* @retval None
*/
PUTCHAR_PROTOTYPE
{
/* Place your implementation of fputc here */
/* e.g. write a character to the USART2 and Loop until the end of transmission */
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
# ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
# endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
こんな出力が出れば完成です。