IntelからRealSenseD455が販売されました。
前回のIntel Realsense D455 発表 ~D435とD455をスペック比較する~に続き、今回は、実機比較を行います。
https://qiita.com/usashirou/items/8468799a45dcc926407d
D455とD435の比較
・D455とD435のパッケージ比較

・D455とD435の正面の比較

・D455とD435の背面の比較

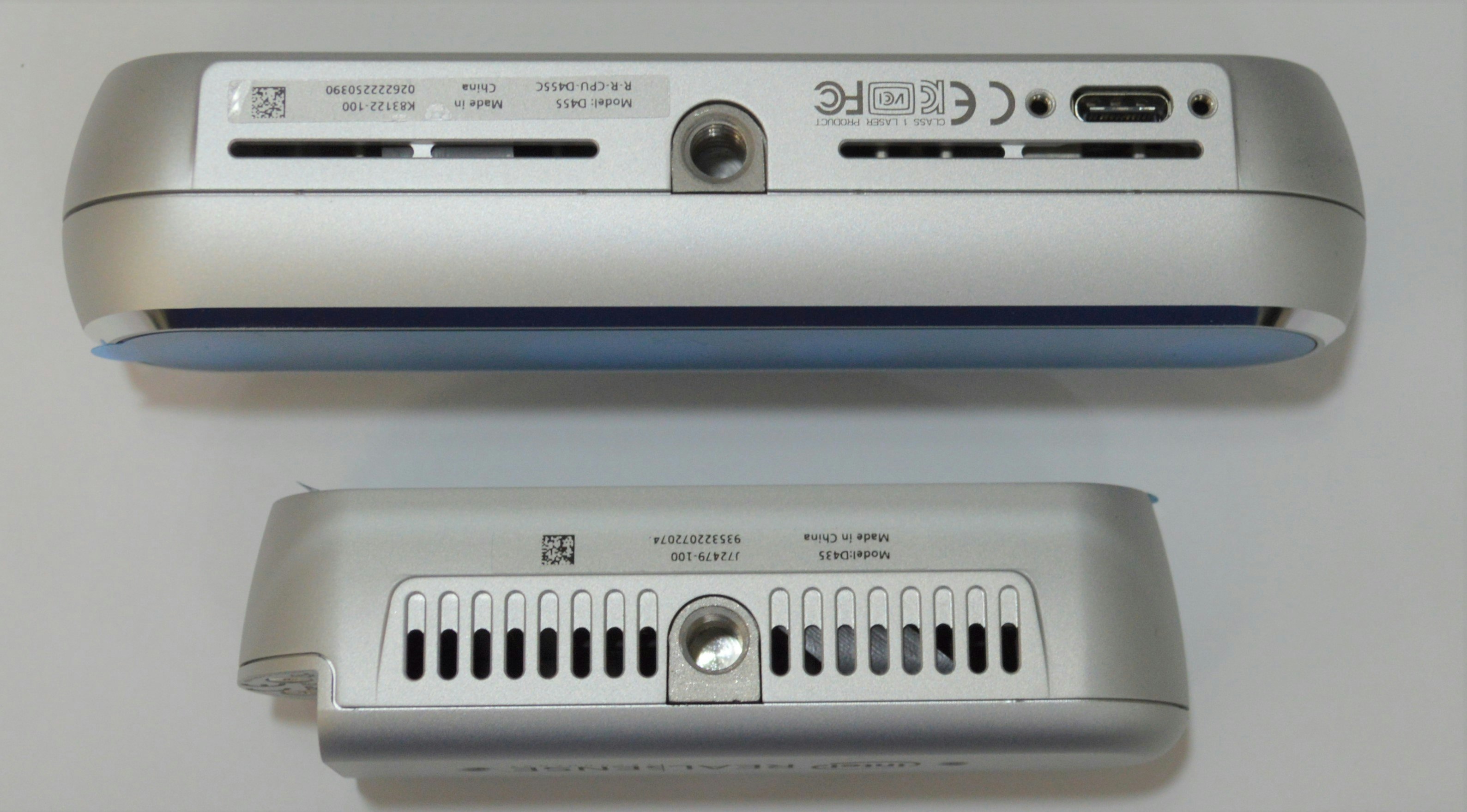
・D455とD435の下面の比較
タップのサイズが異なります。
・D455とD435の上面の比較

RealSense Viewer
RealSense Viewerで画像比較をしましょう。
RealSense Viewerの古いバージョンではD455を認識しないので、新しいバージョンをダウンロードします。
https://www.intelrealsense.com/sdk-2/
Download Intel RealSense ViewerをクリックしてRealsenseViewerをダウンロードします。
RealSense Viewerを起動します
落としてきたExeファイルを起動すればRealSense Viewerが起動されます。
アラートが出たらEnableにすればつながると思います。
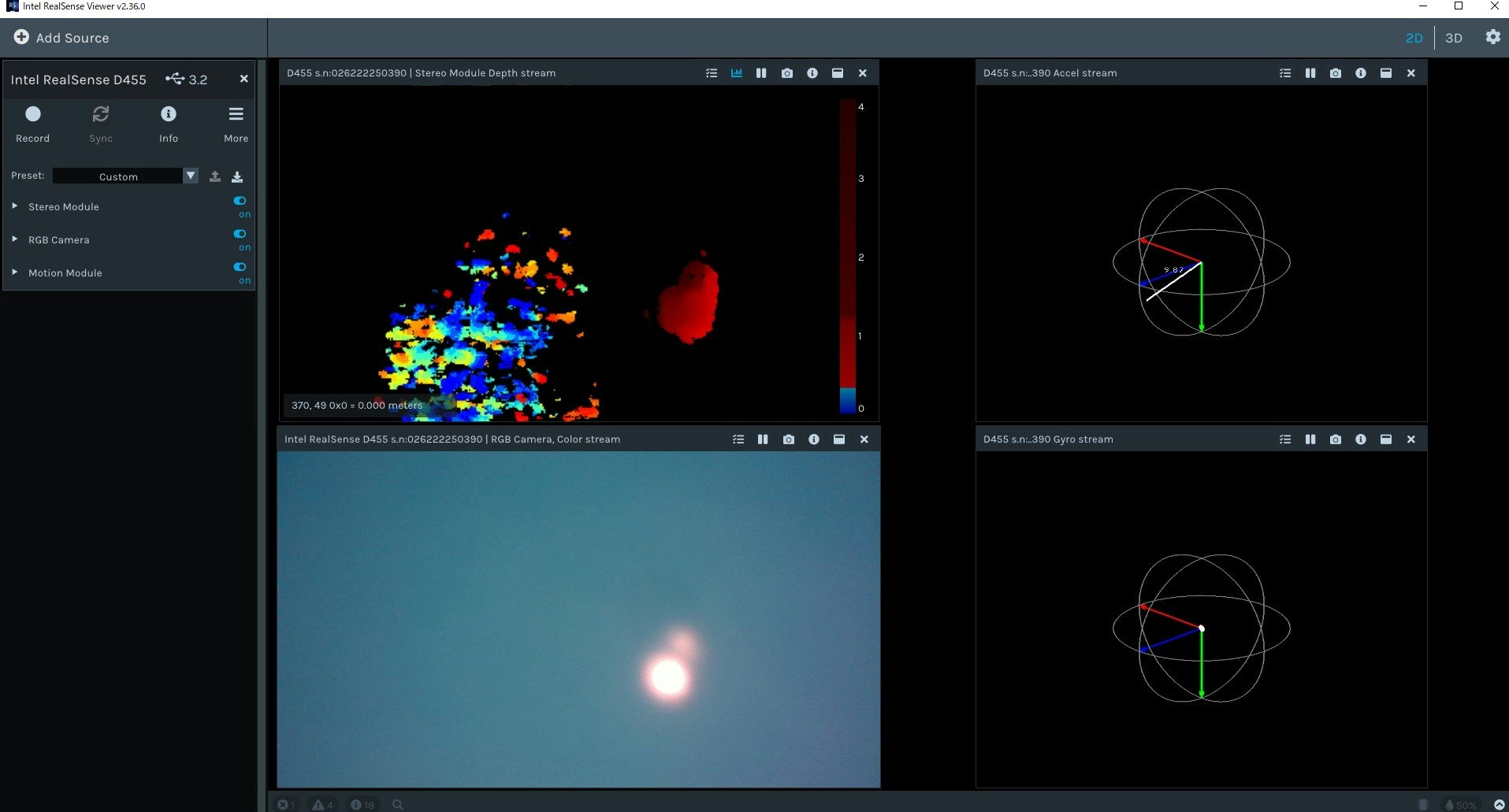
接続した状態です。
画像比較
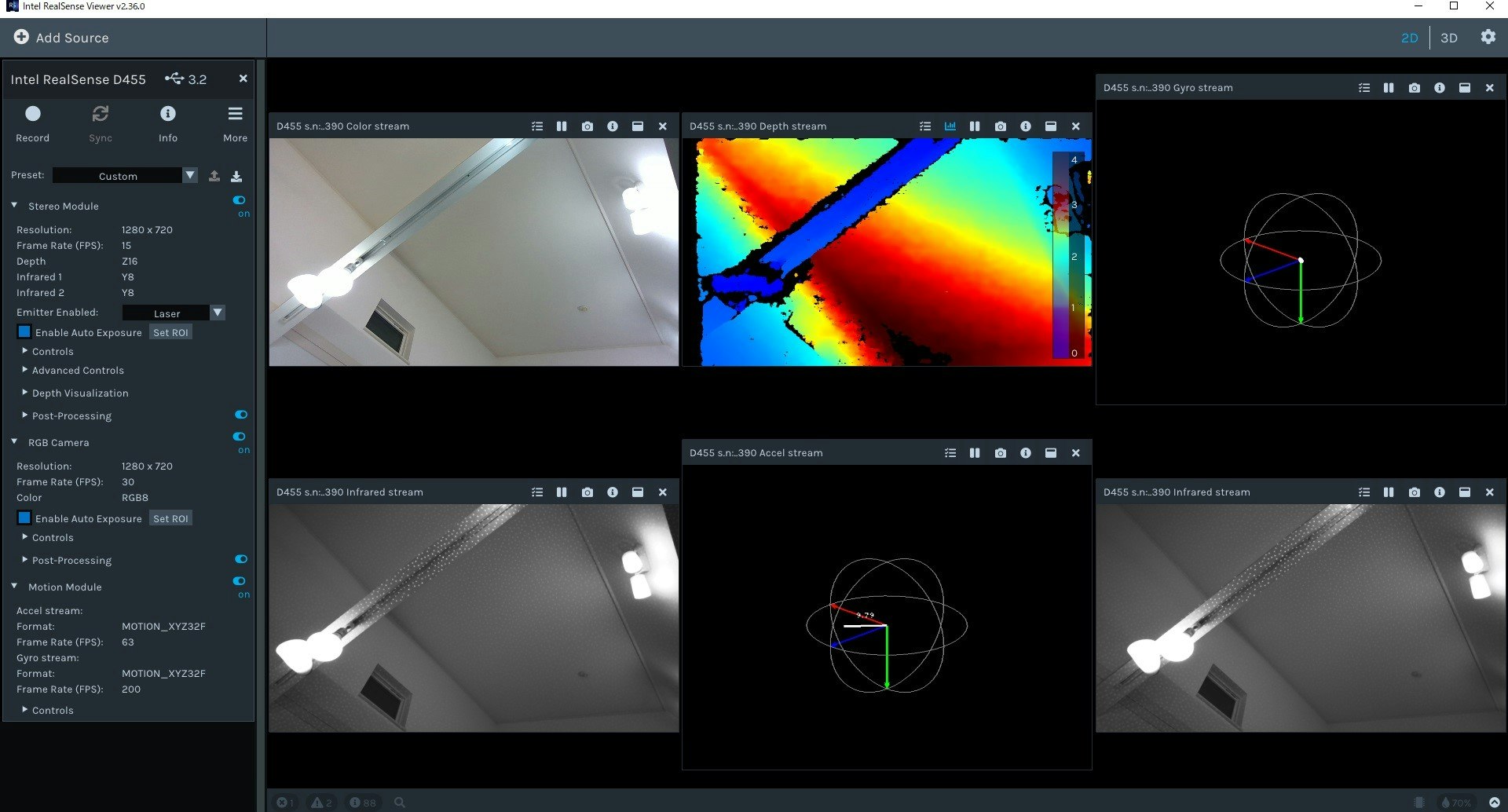
RealSenseD455の画像
もちろんIMUの値も表示されています。
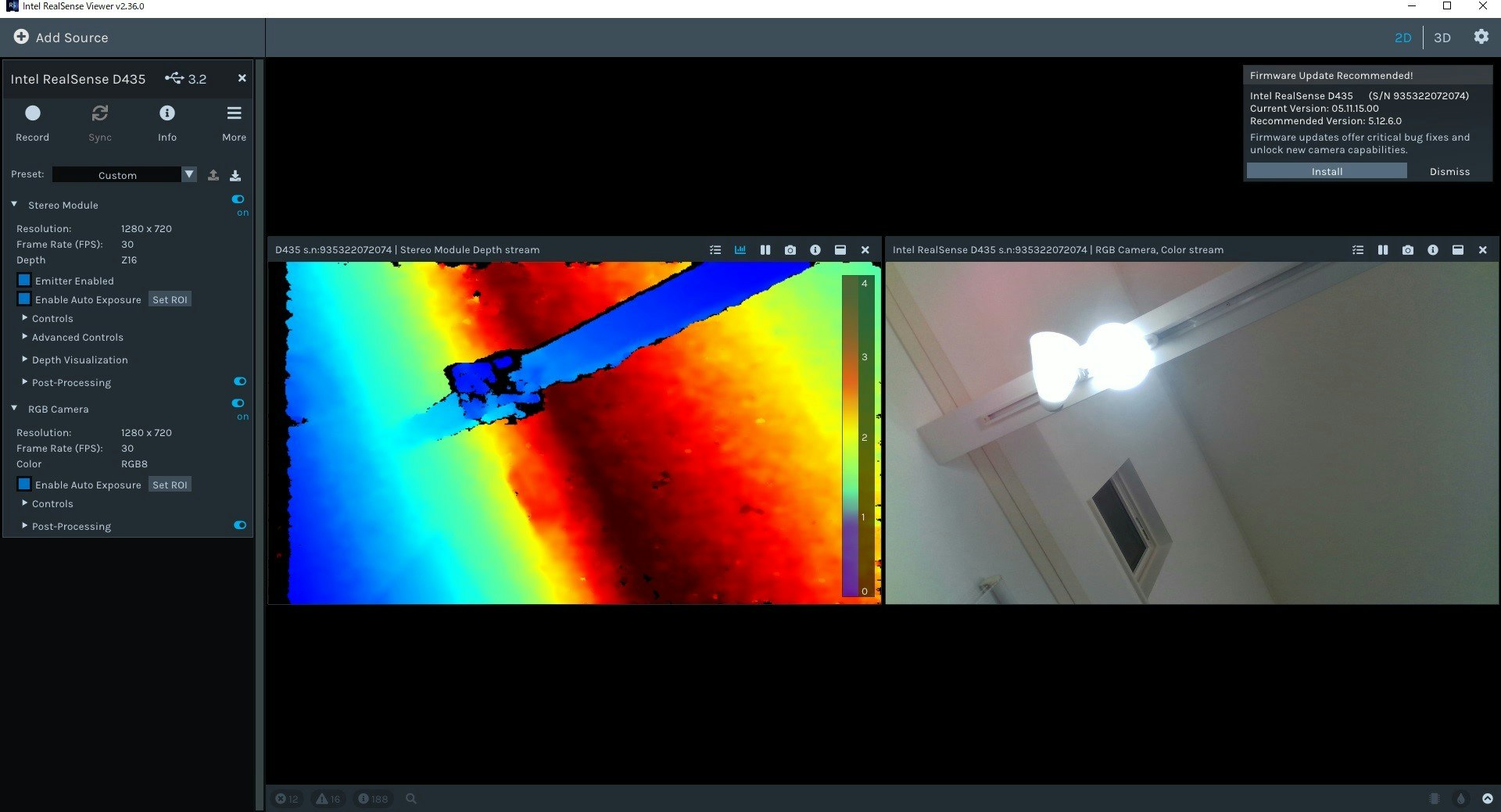
RealSenseD435の画像
比較結果
まったく画角が異なります。
そして、深度が違いますね。
ちなみに、LaserAutoにするとかなり手前で深度計測できず黒色になってしまいます。
デプス(深度)のヒートマップは、青が近く、赤が遠くを表しており
黒色は計測範囲を超えている事を表しています。
画角がかなり広いため、ロボット等で使用する際には、RealsenseD455単体か
複数のRealsenseを使用するのが良いのではないでしょうか?
(3個のD43Xを搭載したロボットもありますので)