インテルは2020年6月16日 Realsense D455を発表及びプレオーダーを開始しました。
Intel RealSense Depth Camera D455
https://www.intelrealsense.com/depth-camera-d455/
Realsenseとは?
Realsenseはインテルが製造しているデプス(深度)カメラです。
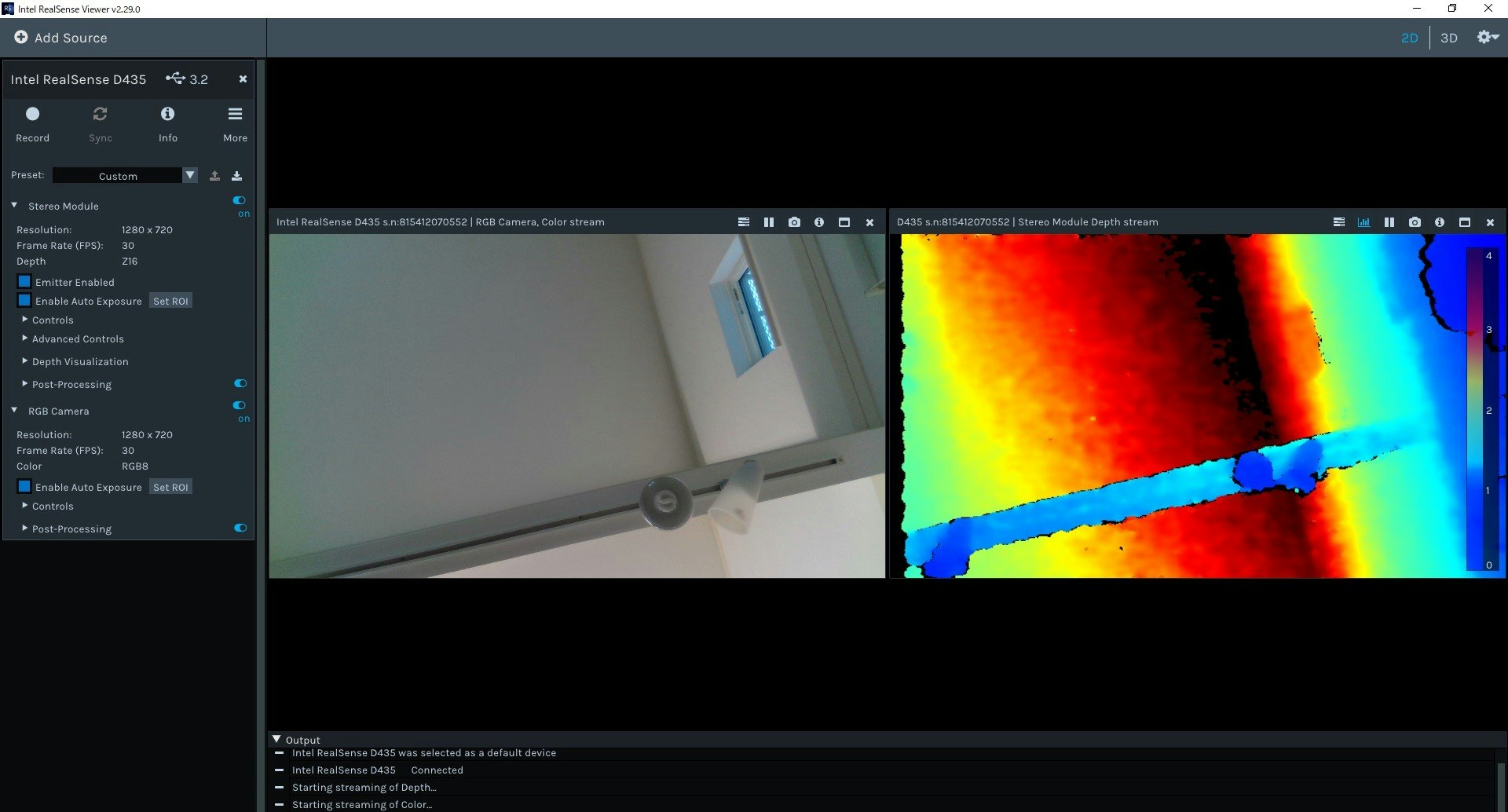
深度カメラにより奥行方向(深度)に対して、障害物をヒートマップの形で見る事が可能です。
(Realsenseの場合、RealSenseViewerなど)
近年は、ROSなどのロボットや自動走行カーなどにおいて地図の生成から、障害物の検出にLidarと共に使用されています。
D435参考画像
Realsenseのラインナップ
以下は、Realsenseシリーズの比較表です
https://www.intelrealsense.com/compare-depth-cameras/
Realsense D455の特徴
D455は、今までの製品とどう違うのでしょうか?
2倍の性能
最大深度距離が10mから20mへと2倍にのびています。
画質を落とすことなく、最大深度が2倍になった事で性能が2倍と称されています。
最小デプス距離
D435:0.105m
D455:0.4m
デプスセンサにおける最小距離は10.5㎝から40㎝と遠くなっており、スペックダウンです。
近距離においては別センサーがあると良いでしょう。
最適距離
0.4mから6m
**20mは最大距離
D455のデプスセンサのフレームレート
1280 × 720 @ 30fps
848 × 480 @ 90fps
**D435はUp to 1280 x 720、Up to 90 fps
最大フレームレートが90fpsであり、90fps出るわけではありません
RGBの画角の向上
D435:69°±1 × 42°±1
D455:86° × 57° (±3)
D435は、RGBカメラの映像とデプスカメラの映像の画角が異なっていましたが、D455は同画角となりました。
これにより、デプスカメラの深度情報と、RGBカメラの画像の比較が簡単になりました。
**なお、デプスセンサの画角はどちらも86° × 57° (±3°)です。
RGBの画質の低下
D435:1920 × 1080 at 30 fps
D455:1280 × 800 at 30 fps
RGBの画質はスペックダウンです。
グローバルシャッター方式
D435も同じです。
IMU(慣性測定ユニット)を搭載
IMUは、慣性測定に使用されており、加速度、角速度、地磁気データなどを取得します。
これらのセンサーデータによりロボットなどの姿勢を算出しています。
D435はD435iのみIMUを搭載していましたがD455は標準搭載となりました。
D455も6DOF慣性測定センサ BMI055を搭載しています。
BMI055は6軸慣性センサで12ビットの3軸の加速度センサと16ビットの3軸ジャイロスコープを搭載しています。
**Intel RealSense Depth Camera D455 includes InertialMeasurement Unit (IMU) for 6 degrees of freedom (6DoF)
Inertial measurement unit:Bosch BMI055
大きくなった理由・・・デプスカメラの距離
横幅やD435の90㎜から124㎜へとかなり大きくなっています。
背面の穴ピッチも45㎜から95㎜と倍以上になっています。
これは、2つのデプスカメラの距離を95㎜へと拡大したことによるものです。
これにより深い深度においても高精度なデータ取得が可能になったそうです。
(ステレオカメラなので、距離が離れている方が確度はあがります)
エラー率
上記カメラ間の距離を広げたことにより
深度センサのエラー率は4mにおいて2%未満となっています。
D35とD455のサイズ比較
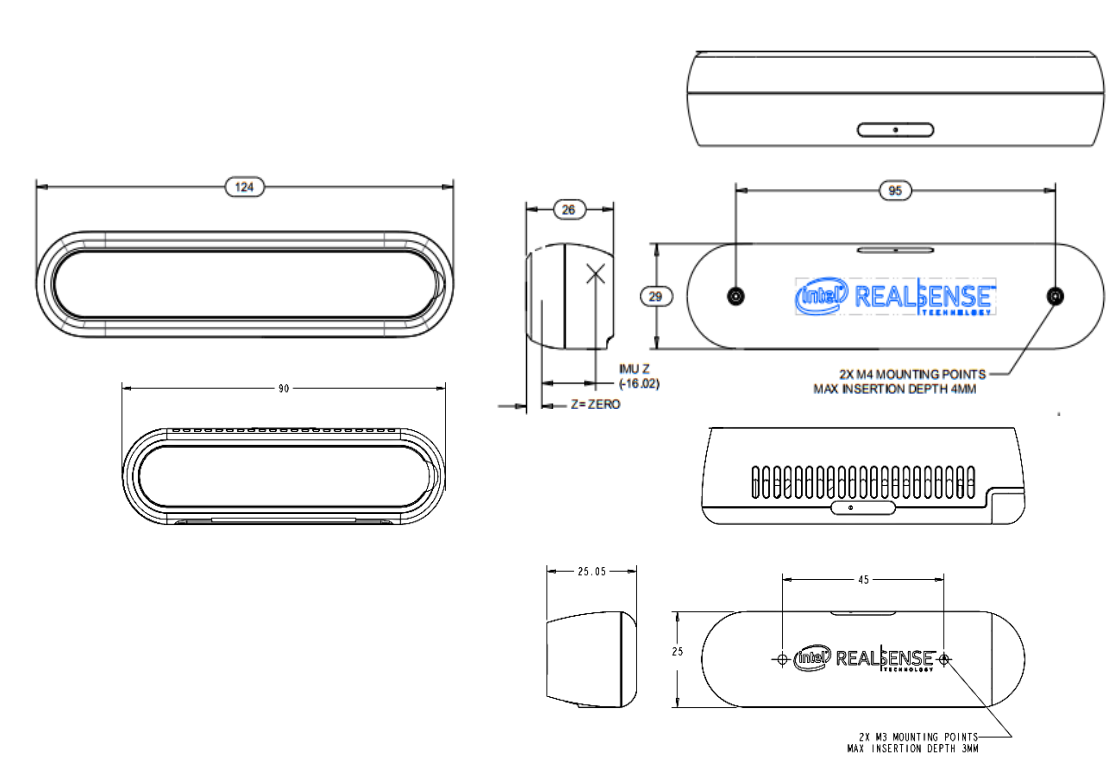
(C)https://www.intelrealsense.com/wp-content/uploads/2020/06/Intel-RealSense-D400-Series-Datasheet-June-2020.pdf
価格
D435:$179
D435i:$199
D455:$239
総合計金額
プレオーダー中で7月末(7月20日の週)から発送だそうです。
日本への送料は13ドル~16ドル程度
合計で255ドル程度です。
実機比較
Intel Realsense D455とD435を実機比較するよ
https://qiita.com/usashirou/items/9c10506cd98a8f9a08b8