📋 はじめに
LiDAR点群データから作成した3次元のPoint Cloud Map(.pcd / .ply)を、ROS2の経路生成で使用する2次元のOccupancy Grid Map(占有格子地図 .pgm)に変換しする一連の方法です。
この方法はClaude Sonnet 4 を使用し、トライアンドエラーで確立できた方法を元に作成しています。
🎯 達成される成果
- 高解像度地図: 5cm/pixel精度の詳細な占有格子地図
- 大規模対応: 177m × 215m の広域カバー
- ROS2完全対応: Navigation2で即座に使用可能
- 高品質変換: 建物、道路、植栽を精密に識別
🛠️ 環境要件
システム要件
- OS: Ubuntu 22.04 LTS
- ROS2: Humble Hawksbill
- Python: 3.10+
- メモリ: 8GB以上推奨(大規模点群処理のため)
サンプルデータ
【GLIM】Getting startedのサンプルデータで作成した.plyファイル(ならびに.plyファイルを変換した.pcdファイル)で動作確認済みです。
必要なパッケージ
# ROS2 Humble
sudo apt install ros-humble-desktop-full
# 依存パッケージ
sudo apt install python3-rosdep2 python3-pip
📦 インストール手順
1. ROS2ワークスペースの準備
bash
# メインワークスペース作成
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
# pointcloud_to_gridパッケージのクローン
git clone https://github.com/jkk-research/pointcloud_to_grid -b ros2
cd ~/ros2_ws
2. grid_map依存関係の解決
bash
# grid_mapワークスペース作成
mkdir -p ~/gridmap_ws/src
cd ~/gridmap_ws/src
# grid_mapをクローン
git clone https://github.com/ANYbotics/grid_map.git --branch humble
cd ~/gridmap_ws
# rosdepの初期化
rosdep update
rosdep install -y --ignore-src --from-paths src
# grid_mapをビルド
colcon build --symlink-install --packages-select grid_map_cmake_helpers
colcon build --symlink-install --packages-up-to grid_map_msgs grid_map_core
# 環境設定
source ~/gridmap_ws/install/setup.bash
echo "source ~/gridmap_ws/install/setup.bash" >> ~/.bashrc
3. pointcloud_to_gridのビルド
bash
cd ~/ros2_ws
colcon build --packages-select pointcloud_to_grid --symlink-install
source ~/ros2_ws/install/setup.bash
4. Pythonライブラリのインストール
bash
# NumPyの互換性問題を解決
pip install "numpy<2.0" --user --force-reinstall
# 必要なライブラリをインストール
pip install open3d numpy pillow pyyaml
🔄 変換手順
1. 点群変換スクリプトの準備
pcd_to_occupancy_grid.pyを作成:
pcd_to_occupancy_grid.py
#!/usr/bin/env python3
"""
Point Cloud (.pcd/.ply) to Occupancy Grid Map (.pgm) Converter
"""
import open3d as o3d
import numpy as np
from PIL import Image
import argparse
import os
import yaml
class PointCloudToOccupancyGrid:
def __init__(self, resolution=0.05, height_threshold=0.3, min_height=-2.0, max_height=2.0):
self.resolution = resolution
self.height_threshold = height_threshold
self.min_height = min_height
self.max_height = max_height
def load_point_cloud(self, file_path):
"""点群ファイルを読み込み"""
print(f"点群ファイルを読み込み中: {file_path}")
if not os.path.exists(file_path):
raise FileNotFoundError(f"ファイルが見つかりません: {file_path}")
pcd = o3d.io.read_point_cloud(file_path)
if len(pcd.points) == 0:
raise ValueError("点群データが空です")
points = np.asarray(pcd.points)
print(f"読み込み完了: {len(points)} 点")
print(f"X範囲: [{points[:, 0].min():.2f}, {points[:, 0].max():.2f}]")
print(f"Y範囲: [{points[:, 1].min():.2f}, {points[:, 1].max():.2f}]")
print(f"Z範囲: [{points[:, 2].min():.2f}, {points[:, 2].max():.2f}]")
return points
def filter_by_height(self, points):
"""高さによる点群フィルタリング"""
z_mask = (points[:, 2] >= self.min_height) & (points[:, 2] <= self.max_height)
filtered_points = points[z_mask]
print(f"高さフィルタリング後: {len(filtered_points)} 点")
return filtered_points
def points_to_grid(self, points):
"""点群を2Dグリッドに変換"""
xy_points = points[:, :2]
min_x, min_y = xy_points.min(axis=0)
max_x, max_y = xy_points.max(axis=0)
width = int(np.ceil((max_x - min_x) / self.resolution))
height = int(np.ceil((max_y - min_y) / self.resolution))
print(f"グリッドサイズ: {width} x {height}")
print(f"グリッド範囲: X[{min_x:.2f}, {max_x:.2f}], Y[{min_y:.2f}, {max_y:.2f}]")
grid_x = ((xy_points[:, 0] - min_x) / self.resolution).astype(int)
grid_y = ((xy_points[:, 1] - min_y) / self.resolution).astype(int)
grid_x = np.clip(grid_x, 0, width - 1)
grid_y = np.clip(grid_y, 0, height - 1)
occupancy_grid = np.full((height, width), -1, dtype=np.int8)
for i in range(len(points)):
gx, gy = grid_x[i], grid_y[i]
z = points[i, 2]
if z > self.height_threshold:
occupancy_grid[height - 1 - gy, gx] = 100
else:
if occupancy_grid[height - 1 - gy, gx] != 100:
occupancy_grid[height - 1 - gy, gx] = 0
metadata = {
'resolution': self.resolution,
'origin': [min_x, min_y, 0.0],
'width': width,
'height': height,
'negate': 0,
'occupied_thresh': 0.65,
'free_thresh': 0.196
}
return occupancy_grid, metadata
def save_pgm(self, occupancy_grid, metadata, pgm_path):
"""PGMファイルとYAMLファイルを保存"""
pgm_data = np.zeros_like(occupancy_grid, dtype=np.uint8)
pgm_data[occupancy_grid == -1] = 205 # 未知 -> グレー
pgm_data[occupancy_grid == 0] = 254 # 自由 -> 白
pgm_data[occupancy_grid == 100] = 0 # 占有 -> 黒
print(f"PGMファイルを保存中: {pgm_path}")
img = Image.fromarray(pgm_data, mode='L')
img.save(pgm_path)
yaml_path = pgm_path.replace('.pgm', '.yaml')
print(f"YAMLファイルを保存中: {yaml_path}")
yaml_data = {
'image': os.path.basename(pgm_path),
'resolution': metadata['resolution'],
'origin': metadata['origin'],
'negate': metadata['negate'],
'occupied_thresh': metadata['occupied_thresh'],
'free_thresh': metadata['free_thresh']
}
with open(yaml_path, 'w') as f:
yaml.dump(yaml_data, f, default_flow_style=False)
print(f"変換完了!")
print(f" - PGMファイル: {pgm_path}")
print(f" - YAMLファイル: {yaml_path}")
total_cells = occupancy_grid.size
occupied_cells = np.sum(occupancy_grid == 100)
free_cells = np.sum(occupancy_grid == 0)
unknown_cells = np.sum(occupancy_grid == -1)
print(f"\n統計情報:")
print(f" - 総セル数: {total_cells}")
print(f" - 占有セル: {occupied_cells} ({occupied_cells/total_cells*100:.1f}%)")
print(f" - 自由セル: {free_cells} ({free_cells/total_cells*100:.1f}%)")
print(f" - 未知セル: {unknown_cells} ({unknown_cells/total_cells*100:.1f}%)")
def convert(self, input_path, output_path):
"""メイン変換処理"""
try:
points = self.load_point_cloud(input_path)
filtered_points = self.filter_by_height(points)
occupancy_grid, metadata = self.points_to_grid(filtered_points)
self.save_pgm(occupancy_grid, metadata, output_path)
except Exception as e:
print(f"エラーが発生しました: {e}")
return False
return True
def main():
parser = argparse.ArgumentParser(description="Point Cloud to Occupancy Grid Map Converter")
parser.add_argument("input", help="入力点群ファイル (.pcd または .ply)")
parser.add_argument("output", help="出力PGMファイル")
parser.add_argument("--resolution", type=float, default=0.05,
help="グリッド解像度 [m/pixel] (デフォルト: 0.05)")
parser.add_argument("--height_threshold", type=float, default=1.0,
help="占有判定の高さ閾値 [m] (デフォルト: 1.0)")
parser.add_argument("--min_height", type=float, default=-1.0,
help="処理する最小高さ [m] (デフォルト: -1.0)")
parser.add_argument("--max_height", type=float, default=3.0,
help="処理する最大高さ [m] (デフォルト: 3.0)")
args = parser.parse_args()
if not args.input.lower().endswith(('.pcd', '.ply')):
print("エラー: 入力ファイルは .pcd または .ply である必要があります")
return
if not args.output.lower().endswith('.pgm'):
print("エラー: 出力ファイルは .pgm である必要があります")
return
converter = PointCloudToOccupancyGrid(
resolution=args.resolution,
height_threshold=args.height_threshold,
min_height=args.min_height,
max_height=args.max_height
)
success = converter.convert(args.input, args.output)
if success:
print("\n変換が正常に完了しました!")
else:
print("\n変換に失敗しました。")
if __name__ == "__main__":
main()
2. 点群の変換実行
bash
# 実行権限を付与
chmod +x pcd_to_occupancy_grid.py
# PCDファイルを変換
python3 pcd_to_occupancy_grid.py input.pcd output_map.pgm --resolution 0.05 --height_threshold 1.0
# PLYファイルを変換
python3 pcd_to_occupancy_grid.py input.ply output_map.pgm --resolution 0.05 --height_threshold 1.0
⚙️ パラメータ調整
解像度の調整
# 高解像度(2cm/pixel)
--resolution 0.02
# 標準解像度(5cm/pixel)
--resolution 0.05
# 低解像度(10cm/pixel)
--resolution 0.10
高さ閾値の調整
# 地面レベル重視
--height_threshold 0.3 --min_height -0.2 --max_height 2.0
# 一般的な屋内環境
--height_threshold 1.0 --min_height -1.0 --max_height 3.0
# 屋外大規模環境
--height_threshold 1.5 --min_height -2.0 --max_height 5.0
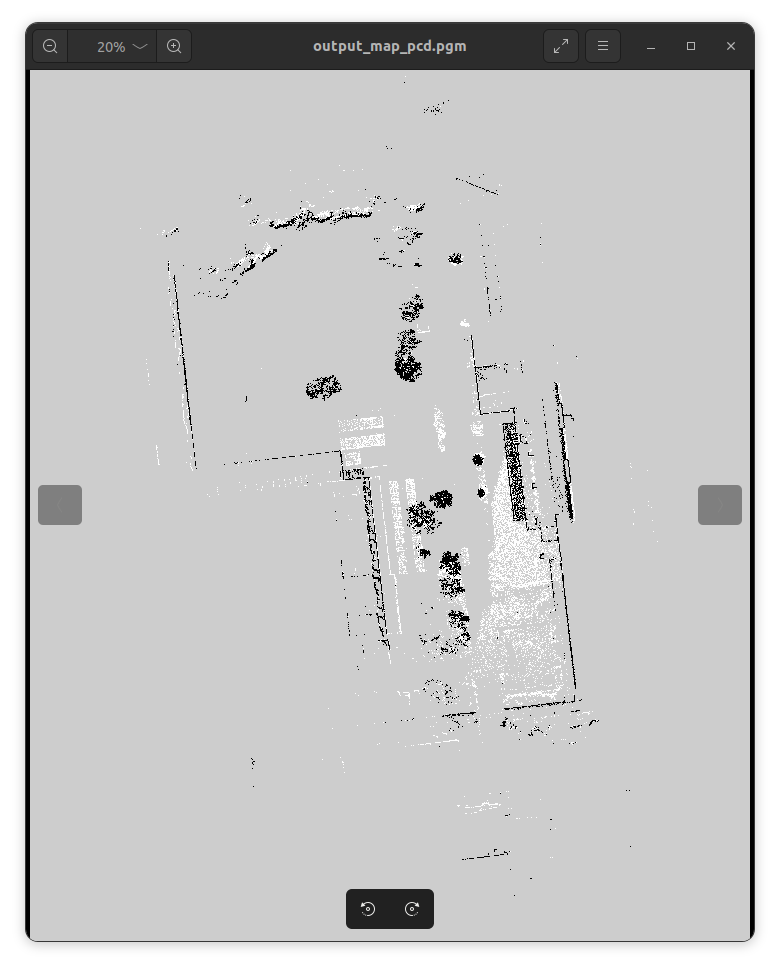
3. マップファイルの可視化
作成した.pgm`のマップを確認
bash
# 画像ビューアーで確認
eog ~/localization/output_map_pcd.pgm
# または、別の画像ビューアーで確認
display ~/localization/output_map_pcd.pgm # ImageMagickが必要
4. YAMLファイルの修正
以下のfix_yaml.pyでNumPyオブジェクトをROSと互換性のある形式に変換:
fix_yaml.py
#!/usr/bin/env python3
"""
YAML ファイル修正スクリプト
"""
import yaml
import numpy as np
def fix_yaml_file(yaml_path):
"""YAMLファイルを修正"""
print(f"YAMLファイルを修正中: {yaml_path}")
with open(yaml_path, 'r') as f:
data = yaml.unsafe_load(f)
if 'origin' in data:
origin = data['origin']
if isinstance(origin, list):
new_origin = []
for item in origin:
if isinstance(item, np.ndarray) or hasattr(item, 'item'):
try:
new_origin.append(float(item))
except:
new_origin.append(float(item.item()) if hasattr(item, 'item') else item)
else:
new_origin.append(item)
data['origin'] = new_origin
backup_path = yaml_path.replace('.yaml', '_backup.yaml')
with open(backup_path, 'w') as f:
f.write(open(yaml_path, 'r').read())
with open(yaml_path, 'w') as f:
yaml.dump(data, f, default_flow_style=False)
print("YAMLファイルの修正完了!")
return True
if __name__ == "__main__":
import sys
if len(sys.argv) > 1:
fix_yaml_file(sys.argv[1])
実行:
bash
python3 fix_yaml.py output_map.yaml
🎯 ROS2での可視化
1. シンプルなマップパブリッシャーの作成
以下のsimple_map_publisher.pyを作成します
simple_map_publisher.py
#!/usr/bin/env python3
"""
シンプルなマップパブリッシャー
PGMファイルとYAMLファイルからROSマップメッセージを作成してパブリッシュ
使用方法:
python3 simple_map_publisher.py output_map_pcd.yaml
"""
import rclpy
from rclpy.node import Node
from nav_msgs.msg import OccupancyGrid
from geometry_msgs.msg import Pose
import yaml
import numpy as np
from PIL import Image
import sys
import os
class SimpleMapPublisher(Node):
def __init__(self, yaml_file):
super().__init__('simple_map_publisher')
# YAMLファイルを読み込み
self.load_map_data(yaml_file)
# パブリッシャーを作成
self.map_publisher = self.create_publisher(OccupancyGrid, '/map', 1)
# タイマーを作成(1Hzでマップをパブリッシュ)
self.timer = self.create_timer(1.0, self.publish_map)
self.get_logger().info(f'マップパブリッシャーを開始: {yaml_file}')
def load_map_data(self, yaml_file):
"""YAMLファイルとPGMファイルを読み込み"""
yaml_dir = os.path.dirname(os.path.abspath(yaml_file))
# YAMLファイルを読み込み
with open(yaml_file, 'r') as f:
map_metadata = yaml.safe_load(f)
# PGMファイルのパスを取得
pgm_file = os.path.join(yaml_dir, map_metadata['image'])
# PGMファイルを読み込み
img = Image.open(pgm_file).convert('L')
img_array = np.array(img)
# OccupancyGridメッセージを作成
self.occupancy_grid = OccupancyGrid()
# ヘッダー設定
self.occupancy_grid.header.frame_id = "map"
# メタデータ設定
self.occupancy_grid.info.resolution = float(map_metadata['resolution'])
self.occupancy_grid.info.width = img_array.shape[1]
self.occupancy_grid.info.height = img_array.shape[0]
# 原点設定
pose = Pose()
pose.position.x = float(map_metadata['origin'][0])
pose.position.y = float(map_metadata['origin'][1])
pose.position.z = float(map_metadata['origin'][2])
pose.orientation.w = 1.0
self.occupancy_grid.info.origin = pose
# 画像データをOccupancyGridデータに変換
# PGM: 0=黒(占有), 255=白(自由), 205=グレー(未知)
# OccupancyGrid: 0-100 (0=自由, 100=占有, -1=未知)
occupancy_data = []
# Y軸を反転して処理(画像座標系からマップ座標系へ)
for y in range(img_array.shape[0]-1, -1, -1):
for x in range(img_array.shape[1]):
pixel_value = img_array[y, x]
if pixel_value == 0: # 黒 -> 占有
occupancy_data.append(100)
elif pixel_value == 254: # 白 -> 自由
occupancy_data.append(0)
else: # グレーなど -> 未知
occupancy_data.append(-1)
self.occupancy_grid.data = occupancy_data
self.get_logger().info(f'マップ読み込み完了:')
self.get_logger().info(f' - サイズ: {self.occupancy_grid.info.width} x {self.occupancy_grid.info.height}')
self.get_logger().info(f' - 解像度: {self.occupancy_grid.info.resolution} m/pixel')
self.get_logger().info(f' - 原点: [{pose.position.x:.2f}, {pose.position.y:.2f}]')
def publish_map(self):
"""マップをパブリッシュ"""
self.occupancy_grid.header.stamp = self.get_clock().now().to_msg()
self.map_publisher.publish(self.occupancy_grid)
def main(args=None):
rclpy.init(args=args)
if len(sys.argv) < 2:
print("使用方法: python3 simple_map_publisher.py <yaml_file>")
print("例: python3 simple_map_publisher.py output_map_pcd.yaml")
return
yaml_file = sys.argv[1]
if not os.path.exists(yaml_file):
print(f"エラー: ファイルが見つかりません: {yaml_file}")
return
try:
node = SimpleMapPublisher(yaml_file)
print(f"マップをパブリッシュ中: {yaml_file}")
print("RVizで /map トピックを購読して確認してください")
print("停止するには Ctrl+C を押してください")
rclpy.spin(node)
except KeyboardInterrupt:
print("\nマップパブリッシャーを停止中...")
except Exception as e:
print(f"エラーが発生しました: {e}")
finally:
if 'node' in locals():
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
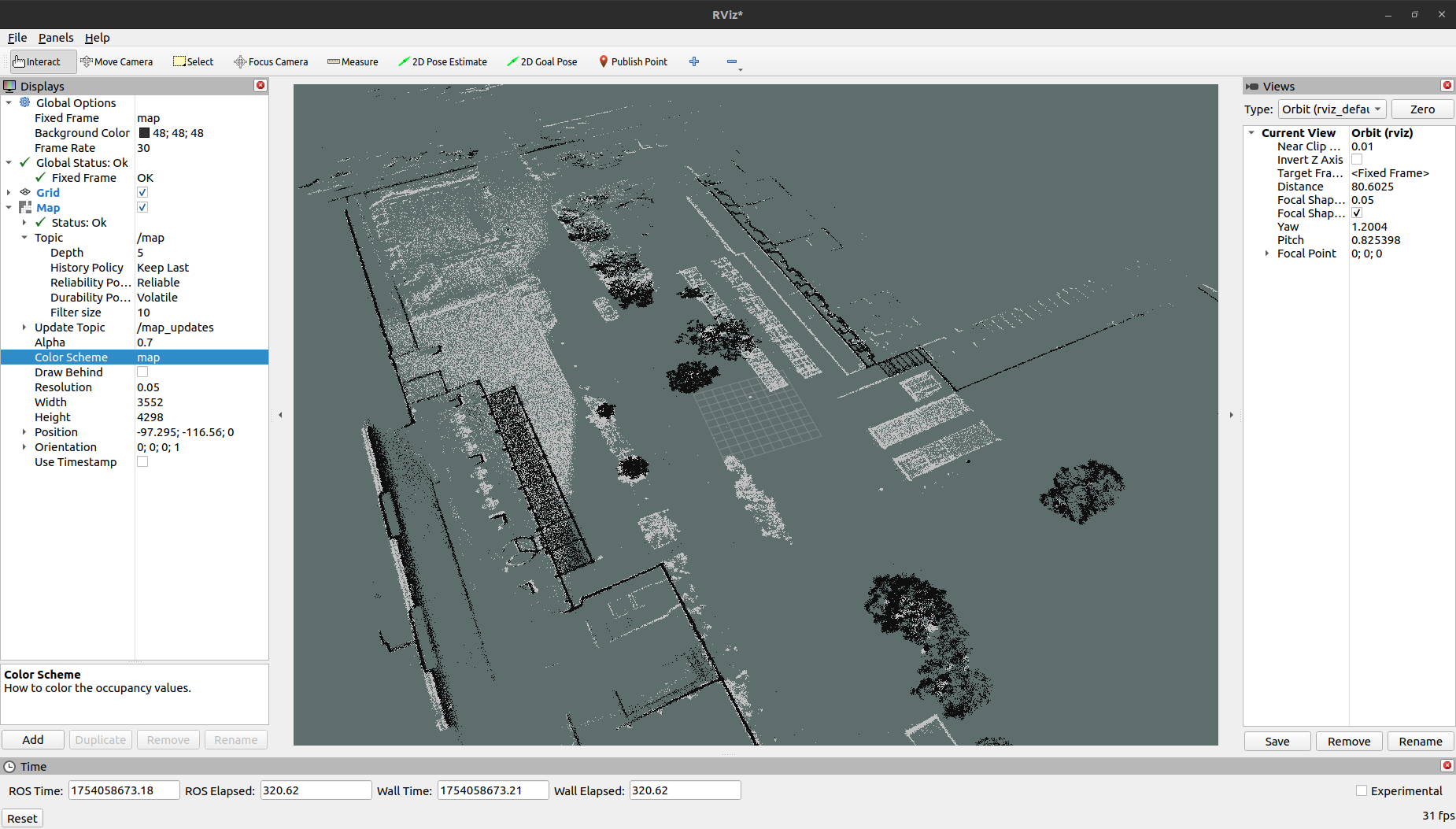
2. マップの表示
bash
# ターミナル1: RViz起動
ros2 run rviz2 rviz2
# ターミナル2: 座標変換パブリッシュ
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 map base_link
# ターミナル3: マップパブリッシュ
python3 simple_map_publisher.py output_map.yaml
3. RVizでの設定
-
Fixed Frame:
mapに設定 - Add Display → Map を選択
-
Topic:
/mapを選択 -
Color Scheme:
mapを選択
📊 結果例
サンプルファイルでresolution 0.05 height_threshold 1.0で処理した場合の結果です。
変換統計
- 点群データ: 3,711,017点 → 1,329,640点(フィルタリング後)
- マップサイズ: 3552 × 4298ピクセル
- カバー範囲: 177m × 215m
- ファイルサイズ: 15MByte(PGM)+ 477Byte(YAML)
品質指標
- 占有セル: 1.1%(建物・障害物)
- 自由セル: 1.6%(移動可能領域)
- 未知セル: 97.3%(未探査領域)
今回は動作確認が目的なので品質にはこだわっていませんが、未知セルがあまりにも多いので、実際に使用するマップではパラメータを調整して占有セル+自由セル=100%に近づくようにすべきです。
🚀 Navigation2での使用
# Navigation2スタックのインストール
sudo apt install ros-humble-navigation2 ros-humble-nav2-bringup
# 自律ナビゲーションの起動
ros2 launch nav2_bringup navigation_launch.py map:=$PWD/output_map.yaml
# ローカライゼーションのみ
ros2 launch nav2_bringup localization_launch.py map:=$PWD/output_map.yaml
🔧 トラブルシューティング
NumPy互換性エラー
pip install "numpy<2.0" --user --force-reinstall
grid_mapビルドエラー
# 依存関係を再インストール
rosdep install -y --ignore-src --from-paths src --reinstall
メモリ不足エラー
- より粗い解像度を使用(--resolution 0.10)
- 高さ範囲を制限(--min_height/-max_height調整)
- ダウンサンプリング実行
📝 ファイル構成
project/
├── pcd_to_occupancy_grid.py # メイン変換スクリプト
├── fix_yaml.py # YAML修正スクリプト
├── simple_map_publisher.py # ROS2マップパブリッシャー
├── output_map.pgm # 占有格子地図
└── output_map.yaml # メタデータファイル