rosActionlib class内でメンバとして利用したときにエラー
解決したいこと
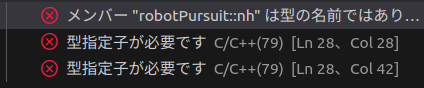
classのメンバー変数としてActionLibのserverを利用しようとすると、Serverのコンストラクタが正しく読み込まれていないのか引数が認識されませんでした。
どなたか教えていただけると助かります。
発生している問題・エラー
class robotPursuit
{
protected:
typedef actionlib::SimpleActionServer<purepursuit_test::pursuitAction> Server;
public:
M_Info info;
SteeringMovement movement;
PurePursuit myPurePursuit;
PID myPID;
ros::Timer timer;
ros::NodeHandle nh;
Vector2_t moter_info;
ros::Publisher move_pub = nh.advertise<std_msgs::Float32MultiArray>("MachineCommand", 10);
ros::Publisher goal_pub = nh.advertise<std_msgs::Float32MultiArray>("gorl_pos", 10);
Server server( nh, "robot_test", false);
void timer_callback(const ros::TimerEvent& e);
発生している問題・エラー

0 likes