クラッシュロワイヤルに出てくるゴブリンをトラッキングしたった ①データ取得
クラッシュロワイヤルに出てくるゴブリンをトラッキングしたった ②アノテーション追加
クラッシュロワイヤルに出てくるゴブリンをトラッキングしたった ③Amazon Rekognition(学習編)
の続きです。
ここまでで何をしたかですが、ゲームのプレイ動画から画像フレームを抽出してその中に対象のキャラがいればアノテーションを付与し、最後にAmazon Rekognitionで学習してモデルを作成した、、、とこまでしました![]()
ここでは、作成したモデルをもとに推論をかけて物体検出をかけてみようと思います。
Preparetion
awscliでAPIを使いたいので、IAMユーザーを作成する必要があります。
csvファイルをダウンロードして、~/.aws/credentialsと~/.aws/configをそれぞれ記述すればコマンドが使えます。
[default]
aws_access_key_id=XXXXXX
aws_secret_access_key=XXXXXXX
[default]
region=ap-northeast-1
output=json
あと必要なのはユーザに対してのアクセス権限追加です。
- AmazonS3ReadOnlyAccess
- AmazonRekognitionCustomLabelsFullAccess
があればAPIは実行できます。

Method
モデルを作成したプロジェクトを開いて「Check metrics」を押す。
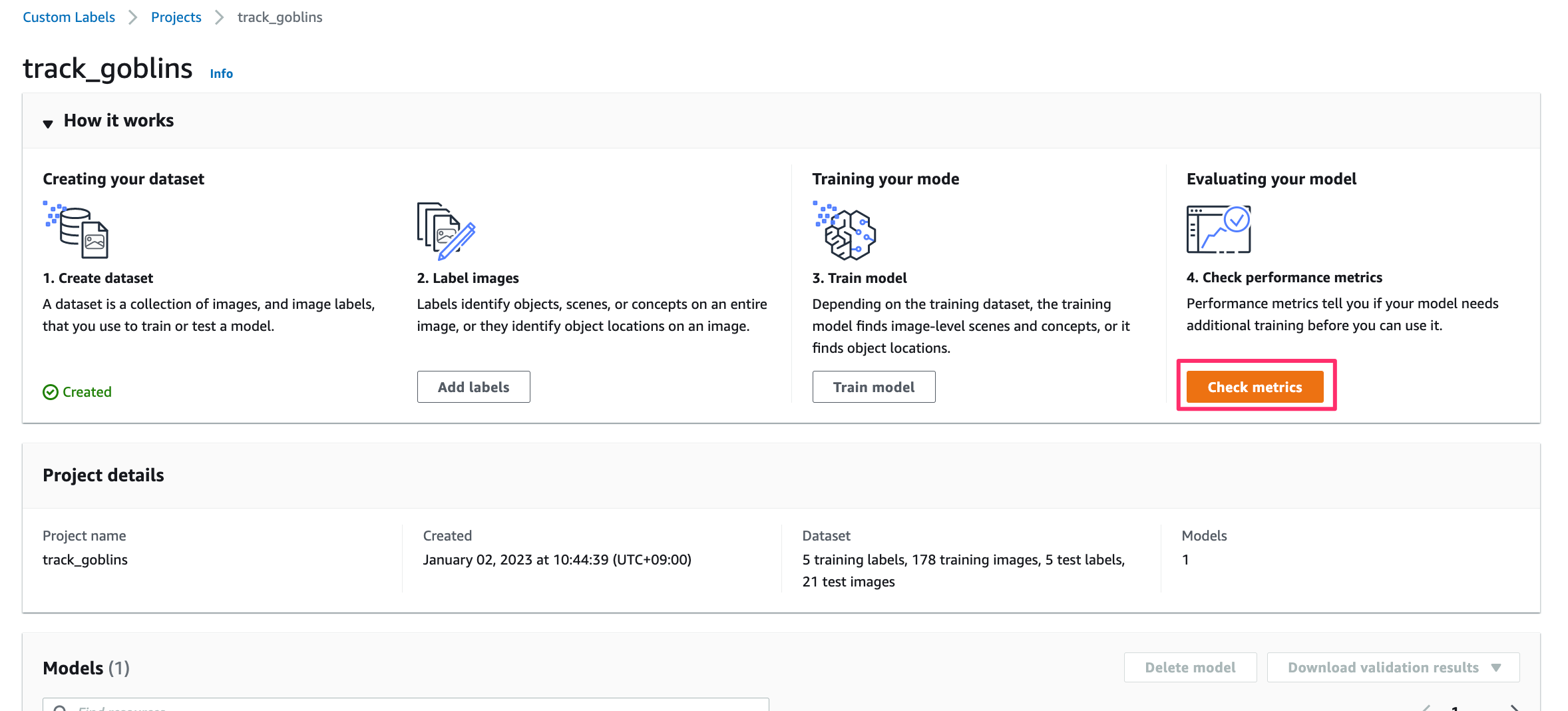
タブから「use model」を選び、 「Use your model」で「AWS CLI command」を選ぶ。
ここでモデルスタート、物体検出、モデルストップそれぞれの実行コマンドが表示されます。
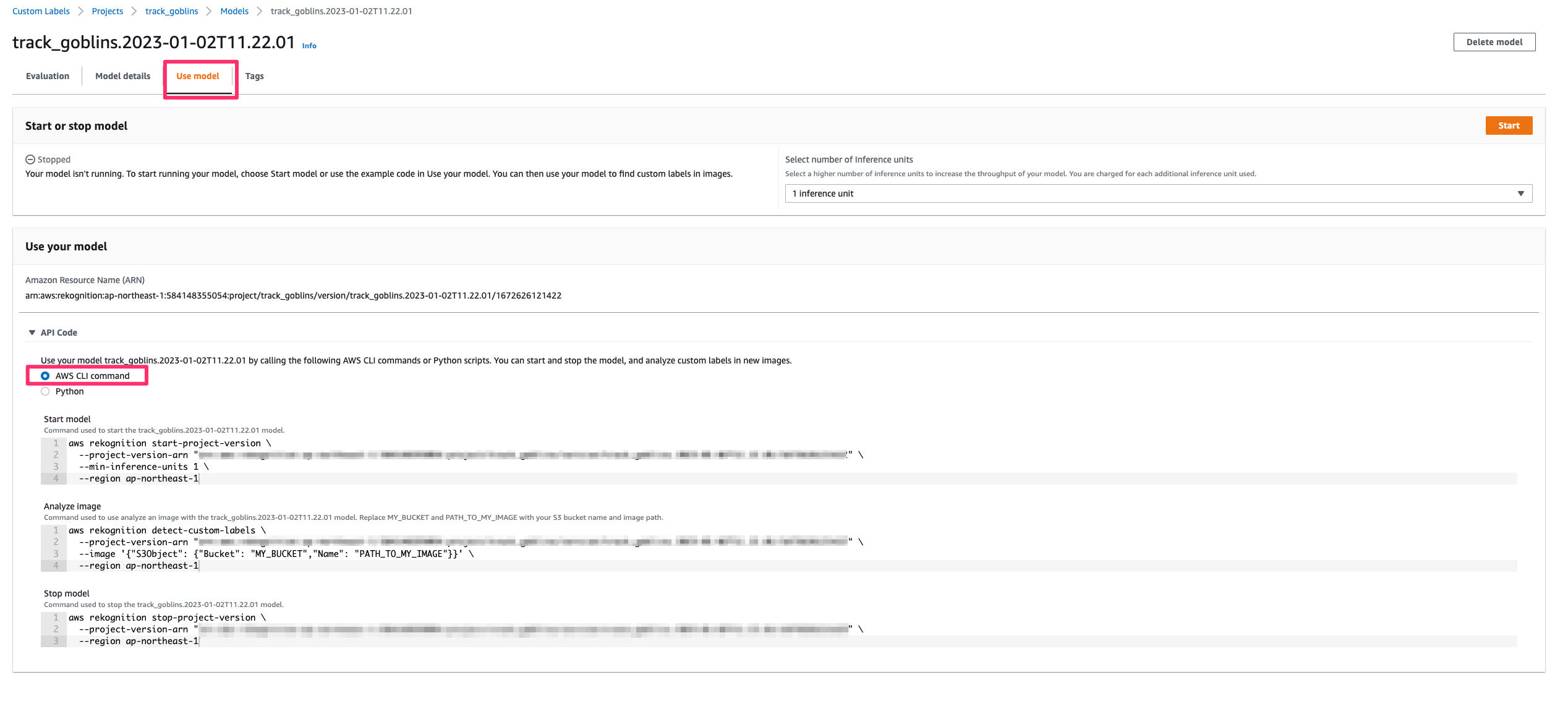
物体検出の実行コマンドを使うにはモデルを実行状態にする必要があります。スタートさせるにはAWSのコンソール上か実行コマンドどちらかで行います。
その後は、物体検出させたい画像をS3に格納し、下記の通りにコマンド実行します。
aws rekognition detect-custom-labels \
--project-version-arn "[ReKognitionのARN]" \
--image '{"S3Object": {"Bucket": "MY_BUCKET","Name": "PATH_TO_MY_IMAGE"}}' \
--region ap-northeast-1
Conclusion
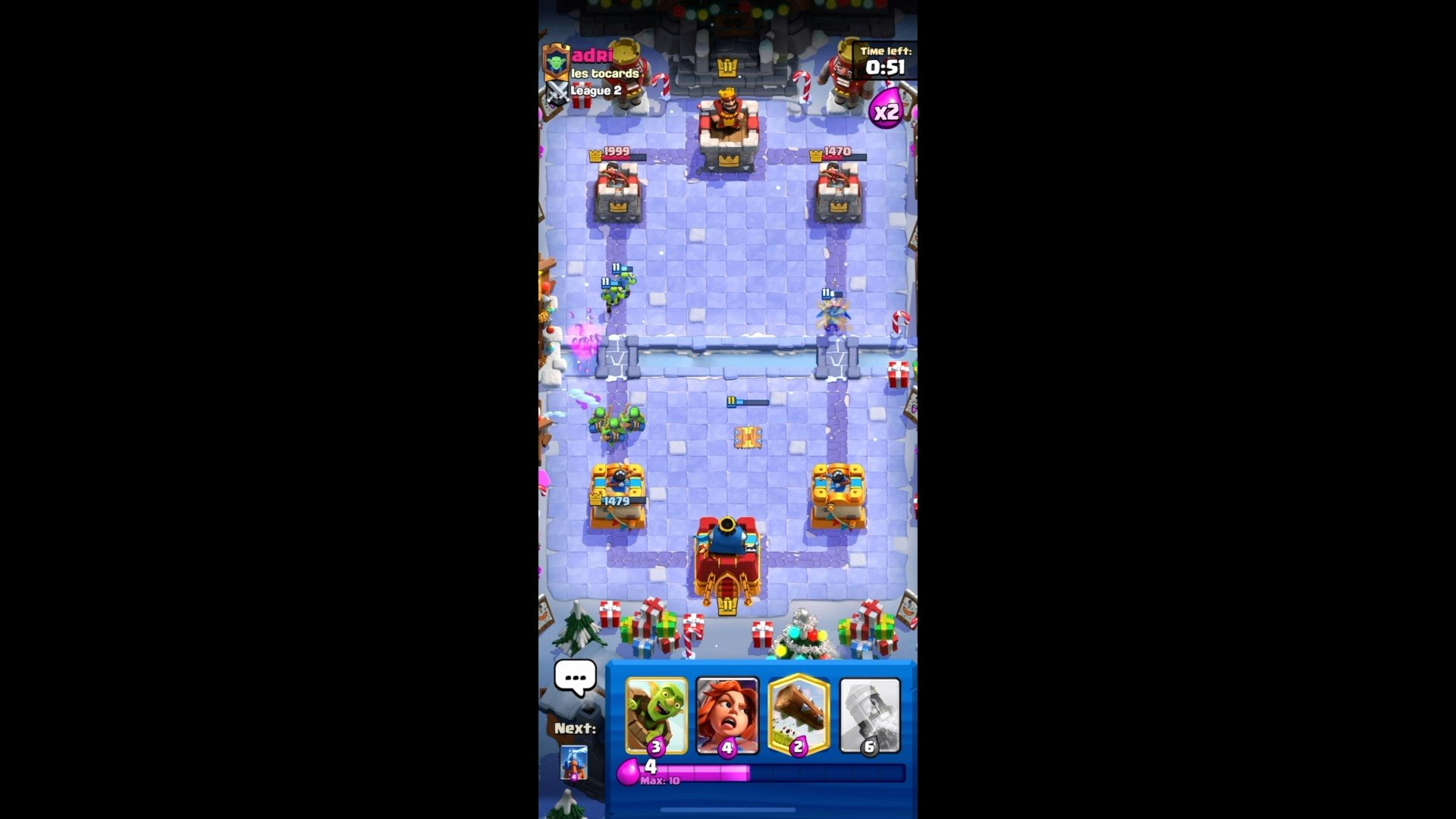
検出に使った画像
出力結果 -- クリックすると開きます --
{
"CustomLabels": [
{
"Name": "ally_dart",
"Confidence": 33.25400161743164,
"Geometry": {
"BoundingBox": {
"Width": 0.043859999626874924,
"Height": 0.14113999903202057,
"Left": 0.47832998633384705,
"Top": 0.07182999700307846
}
}
},
{
"Name": "enemy_spear",
"Confidence": 31.822999954223633,
"Geometry": {
"BoundingBox": {
"Width": 0.013790000230073929,
"Height": 0.027230000123381615,
"Left": 0.4134399890899658,
"Top": 0.35221999883651733
}
}
},
{
"Name": "ally_gobrin",
"Confidence": 27.963998794555664,
"Geometry": {
"BoundingBox": {
"Width": 0.01119999960064888,
"Height": 0.033399999141693115,
"Left": 0.6023499965667725,
"Top": 0.7446900010108948
}
}
},
{
"Name": "ally_gobrin",
"Confidence": 26.987998962402344,
"Geometry": {
"BoundingBox": {
"Width": 0.009499999694526196,
"Height": 0.033160001039505005,
"Left": 0.6100999712944031,
"Top": 0.7576199769973755
}
}
},
{
"Name": "ally_gobrin",
"Confidence": 26.7549991607666,
"Geometry": {
"BoundingBox": {
"Width": 0.0101500004529953,
"Height": 0.034860000014305115,
"Left": 0.4250999987125397,
"Top": 0.7537500262260437
}
}
},
{
"Name": "ally_gobrin",
"Confidence": 26.500999450683594,
"Geometry": {
"BoundingBox": {
"Width": 0.012500000186264515,
"Height": 0.022949999198317528,
"Left": 0.37029001116752625,
"Top": 0.31005001068115234
}
}
},
{
"Name": "ally_gobrin",
"Confidence": 26.4739990234375,
"Geometry": {
"BoundingBox": {
"Width": 0.01573999971151352,
"Height": 0.030489999800920486,
"Left": 0.4244900047779083,
"Top": 0.9287099838256836
}
}
}
]
}
出力はされましたが、味方のキャラなのに敵判定されているので精度は悪いと思います。
後ほどマーキングで位置がずれているか確認します![]()
出力されましたが、精度がかなり悪いです![]()
import argparse
import cv2
import json
def main():
parser = argparse.ArgumentParser()
parser.add_argument("--img", default="capture.jpg", help="入力画像ファイル")
parser.add_argument("--json_path", default="output.json", help="jsonパス")
args = parser.parse_args()
obj_colors = {
"ally_dart": (255, 96, 55),
"enemy_dart": (245, 147, 49),
"ally_gobrin": (36, 179, 83),
"enemy_goblin": (221, 255, 51),
"ally_spear": (42, 125, 209),
"enemy_spear": (50, 183, 250)
}
annotations = None
with open(args.json_path) as fin:
annotations = json.load(fin)
objs = annotations["CustomLabels"]
mat = cv2.imread(args.img)
height, width = mat.shape[:2]
for obj in objs:
color = obj_colors[obj["Name"]][::-1]
rect_rate = obj["Geometry"]["BoundingBox"]
x = int(width * rect_rate["Left"])
y = int(height * rect_rate["Top"])
w = int(width * rect_rate["Width"])
h = int(height * rect_rate["Height"])
print(f"{width} {height}")
print(f"{x} {y} {w} {h}")
cv2.rectangle(mat, (x, y), (x+w, y+h), color, thickness=3)
cv2.imshow("Game", mat)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.imwrite("dst.png", mat)
if __name__ == "__main__":
main()
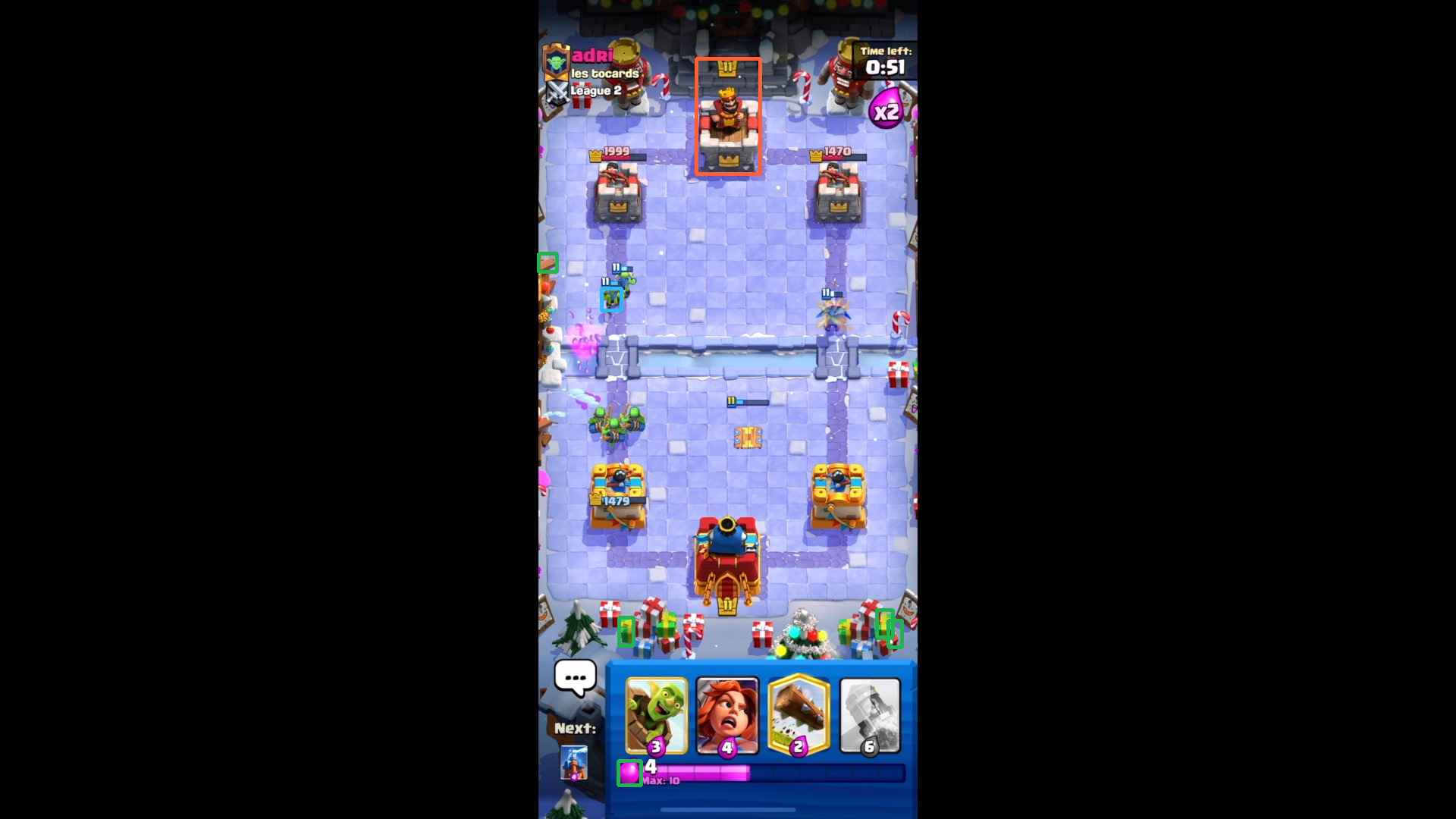
マーカー
| キャラ | color |
|---|---|
| ally_dart | rgb(255, 96, 55) |
| enemy_dart | rgb(245, 147, 49) |
| ally_gobrin | rgb(36, 179, 83) |
| enemy_goblin | rgb(221, 255, 51) |
| ally_spear | rgb(42, 125, 209) |
| enemy_spear | rgb(50, 183, 250) |
To Be Continued
次回はローカルから動画を用いて物体検出をしてみようと思います。
、、、と思いましたが、先に検出精度を上げる方法を考えます。