異なるマイコン同士でSPI通信をしたい
解決したいこと
マイコン同士でSPI通信をしたいが、うまく受信できないのでアドバイスいただきたい。
発生している問題・エラー
以下の図のように配線して、STMマイコン(センサを統合してpicoに送信)→pico(気象データを受信)に風速と風向のデータを送信したいです。
ラズパイ:Raspberry Pi Pico, 電源はUSB(micro Python)
STMマイコン:NUCLEO-F303K8, 電源はUSB(c++)
開発環境:Thonny V4.1.6
USBは同じPCのUSBポートに接続
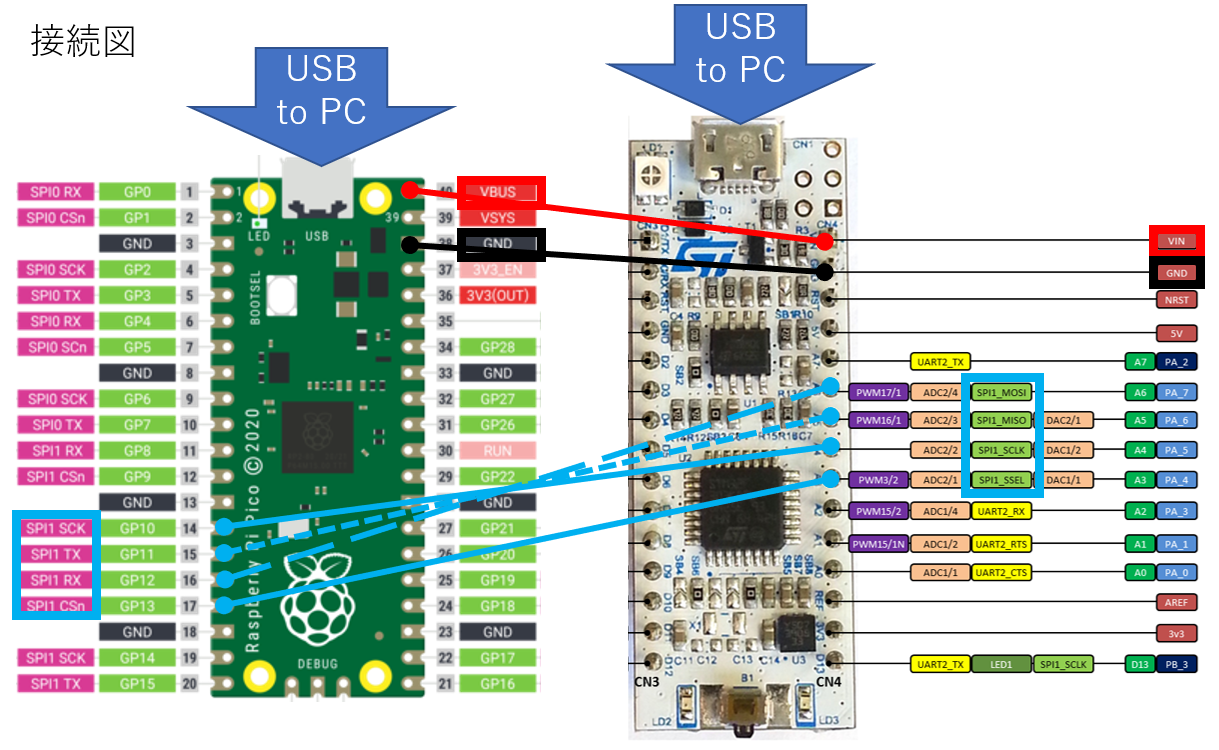
| NUCLEO-F303K8 (STM32ピン) | Raspberry Pi Pico (SPI1ピン) | 機能 |
|---|---|---|
| PA_5 | GP10 | SCK (クロック) |
| PA_6 | GP11 | MOSI (送信) |
| PA_7 | GP12 | MISO (受信) |
| PA_4 | GP13 | CS (チップセレクト) |
STMマイコンのプログラム(mbed Keil Studio Cloudでコンパイル)
#include "mbed.h"
// SPIオブジェクトの作成 (SPI1: PA_7=MOSI, PA_6=MISO, PA_5=SCK, PA_4=CS)
SPI spi(PA_7, PA_6, PA_5); // MOSI, MISO, SCK
DigitalOut led(LED1); // デバッグ用LED
int main() {
printf("NUCLEO-F303K8 SPI Slave Example\n");
while (true) {
// スレーブとしてデータを返送
uint8_t wind_speed = 52; // 例: 5.2 m/s を10倍して送信
uint8_t wind_dir = 73; // 例: 73度
// マスターからの要求に応答してデータを送信
uint8_t received = spi.write(wind_speed); // 1バイト目(風速を送信)
received = spi.write(wind_dir); // 2バイト目(風向を送信)
// デバッグ情報
printf("Sent: Wind Speed=%d, Wind Direction=%d\n", wind_speed, wind_dir);
led = !led; // デバッグ用LEDをトグル
}
}
実行結果:
Sending: Wind Speed=52, Wind Direction=73
Sending: Wind Speed=52, Wind Direction=73
Sending: Wind Speed=52, Wind Direction=73
・・・・
Rasp picoのプログラム(Thonnyでコード)
from machine import Pin, SPI
import time
# SPI1の初期化 (GP10=SCK, GP11=MOSI, GP12=MISO, GP13=CS)
spi = SPI(1, baudrate=500000, polarity=0, phase=0, bits=8, firstbit=SPI.MSB,
sck=Pin(10), mosi=Pin(11), miso=Pin(12))
cs = Pin(13, Pin.OUT) # CSピン(アクティブLow)
cs.value(1) # CSピンを初期状態で非アクティブ (High)
print("SPI Master Ready")
while True:
cs.value(0) # CSピンをアクティブ (Low)
# スレーブにダミーデータを送信しながらデータを受信
data = spi.read(2, 0xFF) # 2バイトを受信(ダミーデータとして0xFFを送信)
cs.value(1) # CSピンを非アクティブ (High)
wind_speed = data[0] / 10.0 # 風速デコード(例: 52 → 5.2 m/s)
wind_dir = data[1] # 風向デコード
print(f"Received: Wind Speed={wind_speed} m/s, Wind Direction={wind_dir}°")
time.sleep(1) # 1秒待機
実行結果:
Received: Wind Speed=0.0 m/s, Wind Direction=0°
Received: Wind Speed=0.0 m/s, Wind Direction=0°
Received: Wind Speed=0.0 m/s, Wind Direction=0°
・・・・
できていないこと
受信の値が指定した数値になりません。
原因は何でしょうか。
0 likes