はじめに
波を作ってみたので紹介します。
YouTube
C# Job Systemで波動方程式を実装し、ShaderGraphで水を描画しています。
GitHub
https://github.com/rngtm/Unity-JobSystem-WaveEquation
§1 . 波動方程式
2次元の波の運動は以下の数式で表されます。
\frac{\partial^2 u }{\partial t^2} = s^2 \left( \frac{\partial^2 u }{\partial x^2} + \frac{\partial^2 u }{\partial y^2} \right)
$u = u(x,y,t)$ は水面の波の変位、$s$は波の伝わる速さを表しています。
§2 . 関数f(x, y)の2階微分の計算
ここで、関数xとyの関数 $f(x,y)$ の2階微分は、ある小さな値 $h$ を使って以下の式で計算することができます。
$$
\frac{\partial^2}{\partial x^2}f(x, y) = \frac{f(x + h, y) + f(x - h,y) - 2 f(x,y)}{h^2} + O(h^2)
$$
$$
\frac{\partial^2}{\partial y^2}f(x, y) = \frac{f(x, y + h) + f(x,y - h) - 2 f(x,y)}{h^2} + O(h^2)
$$

$O(h^2)$は誤差を表しており、$h$を$0$に近づけるほど、誤差$O(h^2)$は0に近づきます。
※上記の式はテイラー展開を利用することで導出できますが、ここでは説明しません。
参考 : https://na.cs.tsukuba.ac.jp/jikken/wp-content/uploads/2016/07/wave.pdf
§3 . 波の加速度の計算
ここでは、時刻tにおける波の変位を $u(x,y)$ と表します。
先ほどの §2. の計算式の $ f(x,y) \rightarrow u(x,y)$ と置き換えると、$u$の$x, y$に関する2階微分を得ることができます。
$h$は$\Delta x, \Delta y$に置き換えます。
$$
\frac{\partial^2}{\partial x^2}u(x, y) \approx \frac{u(x + \Delta x, y) + f(x - \Delta x,y) - 2 u(x,y)}{(\Delta x)^2}
$$
$$
\frac{\partial^2}{\partial y^2}u(x, y) \approx \frac{u(x, y + \Delta y) + f(x,y - \Delta y) - 2 u(x,y)}{(\Delta y)^2}
$$

2階微分の足し合わせに波の伝わる速さ $s^2$を乗算すると、波の加速度 $ \frac{\partial^2 u }{\partial t^2} $ が求まります。
$$
\frac{\partial^2 u }{\partial t^2} = s^2 \left( \frac{\partial^2 u}{\partial x^2} + \frac{\partial^2 u }{\partial y^2} \right)
$$
§4. MonoBehaviourで波動方程式を実装してみる
まずはC# Job Systemを使わず、通常のMonoBehaviourで波動方程式シミュレーションを実装してみました。
ソースコード全体(WaveMesh2D.cs)
using System.Linq;
using UnityEngine;
/// <summary>
/// 2次元の波動方程式の実装
/// </summary>
[RequireComponent(typeof(MeshFilter))]
[RequireComponent(typeof(MeshRenderer))]
public class WaveMesh2D : MonoBehaviour
{
[SerializeField] private Vector2Int resolution = new Vector2Int(16, 16); // メッシュ解像度
[SerializeField] private float s = 0.5f; // 波の伝わる速さ
[SerializeField] private Vector2 meshSize = new Vector2(8f, 8f);
private Mesh mesh;
private Vector3[] vertices = null;
private Vector3[] normals = null;
private float[,] waveTable; // 波の変位
private float[,] waveSpeedTable;
[SerializeField] private float rainForceMin = 0.1f;
[SerializeField] private float rainForceMax = 0.3f;
[SerializeField] private int rainIntervalFrame = 10;
// Start is called before the first frame update
void Start()
{
// 波のデータ作成
waveTable = new float[resolution.x, resolution.y];
waveSpeedTable = new float[resolution.x, resolution.y];
// 波の初期化
InitializeWave();
// メッシュの作成
CreateMesh();
}
/// <summary>
/// 波の初期状態の設定
/// </summary>
private void InitializeWave()
{
// 座標(1,1)を中心にして、水を持ち上げます
Vector2 center = new Vector2(1f, 1f);
for (int yi = 1; yi < resolution.y - 1; yi++) // 端点(yi = 0, yi = resolution.y - 1 ) は固定する
{
for (int xi = 1; xi < resolution.x - 1; xi++) // 端点(xi = 0, xi = resolution.x - 1 ) は固定する
{
var p = GetVertexPosition(xi, yi);
float r = (new Vector2(p.x, p.z) - center).magnitude;
float h = Mathf.Exp(-r * 8.0f) * 2.0f;
h = Mathf.Clamp01(h);
waveTable[xi, yi] = h;
}
}
}
void FixedUpdate()
{
SolveWaveEquation(Time.fixedDeltaTime);
}
// 2次元波動方程式の実装
void SolveWaveEquation(float deltaTime)
{
float dx = meshSize.x / resolution.x;
float dy = meshSize.y / resolution.y;
// 位置を元に加速度 (d/dt)^2 u の計算
for (int yi = 1; yi < resolution.y - 1; yi++)
{
for (int xi = 1; xi < resolution.x - 1; xi++)
{
float wave = waveTable[xi, yi];
float waveX1 = waveTable[xi - 1, yi];
float waveX2 = waveTable[xi + 1, yi];
float waveY1 = waveTable[xi, yi - 1];
float waveY2 = waveTable[xi, yi + 1];
// (d/dx)^2 u
float dudx2 = (waveX1 + waveX2 - 2f * wave) / dx / dx;
// (d/dy)^2 u
float dudz2 = (waveY1 + waveY2 - 2f * waveTable[xi, yi]) / dy / dy;
float waveAccel = s * s * (dudx2 + dudz2);
waveSpeedTable[xi, yi] += waveAccel * deltaTime;
}
}
// 速度の反映
for (int yi = 1; yi < resolution.y - 1; yi++)
{
for (int xi = 1; xi < resolution.x - 1; xi++)
{
waveTable[xi, yi] += waveSpeedTable[xi, yi] * deltaTime;
}
}
UpdateMesh();
}
/// <summary>
/// メッシュ作成
/// </summary>
void CreateMesh()
{
mesh = new Mesh();
// 頂点の作成
int vertexCount = resolution.x * resolution.y;
// 頂点・法線・UV作成
vertices = new Vector3[vertexCount];
normals = new Vector3[vertexCount].Select(x => new Vector3(0, 1, 0)).ToArray();
var uv = new Vector2[vertexCount];
int vi = 0;
for (int yi = 0; yi < resolution.y; yi++)
{
for (int xi = 0; xi < resolution.x; xi++)
{
vertices[vi] = GetVertexPosition(xi, yi);
uv[vi] = new Vector2((float)xi / (resolution.x - 1), (float)yi / (resolution.y - 1));
vi++;
}
}
// 頂点インデックス作成
int triangleCount = (resolution.x - 1) * (resolution.y - 1) * 6;
int[] triangles = new int[triangleCount];
int offset = 0;
int ti = 0;
for (int yi = 0; yi < resolution.y - 1; yi++)
{
for (int xi = 0; xi < resolution.x - 1; xi++)
{
triangles[ti++] = offset;
triangles[ti++] = offset + resolution.x;
triangles[ti++] = offset + 1;
triangles[ti++] = offset + resolution.x;
triangles[ti++] = offset + resolution.x + 1;
triangles[ti++] = offset + 1;
offset += 1;
}
offset += 1;
}
mesh.SetVertices(vertices);
mesh.uv = uv;
mesh.SetTriangles(triangles, 0);
GetComponent<MeshFilter>().mesh = mesh;
}
/// <summary>
/// メッシュ更新
/// </summary>
private void UpdateMesh()
{
float dx = meshSize.x / resolution.x;
float dy = meshSize.y / resolution.y;
int vi = 0;
for (int yi = 0; yi < resolution.y; yi++)
{
for (int xi = 0; xi < resolution.x; xi++)
{
vertices[vi] = GetVertexPosition(xi, yi);
vi++;
}
}
for (int yi = 0; yi < resolution.y - 1; yi++)
{
for (int xi = 0; xi < resolution.x - 1; xi++)
{
// 法線の計算
float dudx = (waveTable[xi + 1, yi] - waveTable[xi - 1, yi]) / dx;
float dudy = (waveTable[xi, yi] - waveTable[xi - 1, yi]) / dy;
normals[xi + yi * resolution.x] = new Vector3(-dudx, 1.0f, -dudy).normalized;
}
}
mesh.SetVertices(vertices);
mesh.SetNormals(normals);
}
/// <summary>
/// 現在の頂点座標の取得
/// </summary>
private Vector3 GetVertexPosition(int x, int y)
{
return new Vector3(
(float) x / resolution.x * meshSize.x - meshSize.x / 2f,
waveTable[x, y],
(float) y / resolution.y * meshSize.y - meshSize.y / 2f
);
}
}
波動方程式の計算部分(抜粋)
// 2次元波動方程式の計算 (FixedUpdate()から呼ぶ想定)
void SolveWaveEquation(float deltaTime)
{
float dx = meshSize.x / resolution.x;
float dy = meshSize.y / resolution.y;
// 波の速度の計算
for (int yi = 1; yi < resolution.y - 1; yi++)
{
for (int xi = 1; xi < resolution.x - 1; xi++)
{
float wave = waveTable[xi, yi]; // u(x, y)
float waveX1 = waveTable[xi - 1, yi]; // u(x - dx, y)
float waveX2 = waveTable[xi + 1, yi]; // u(x + dx, y)
float waveY1 = waveTable[xi, yi - 1]; // u(x, y - dy)
float waveY2 = waveTable[xi, yi + 1]; // u(x, y + dy)
// (d/dx)^2 u
float dudx2 = (waveX1 + waveX2 - 2f * wave) / dx / dx;
// (d/dy)^2 u
float dudz2 = (waveY1 + waveY2 - 2f * wave) / dy / dy;
// 加速度(d/dt)^2 u の計算
float waveAccel = s * s * (dudx2 + dudz2);
// 加速度を使って速度を更新
waveSpeedTable[xi, yi] += waveAccel * deltaTime;
}
}
// 速度を使って位置を更新
for (int yi = 1; yi < resolution.y - 1; yi++)
{
for (int xi = 1; xi < resolution.x - 1; xi++)
{
waveTable[xi, yi] += waveSpeedTable[xi, yi] * deltaTime;
}
}
UpdateMesh();
}
補足 : メッシュの法線の計算方法
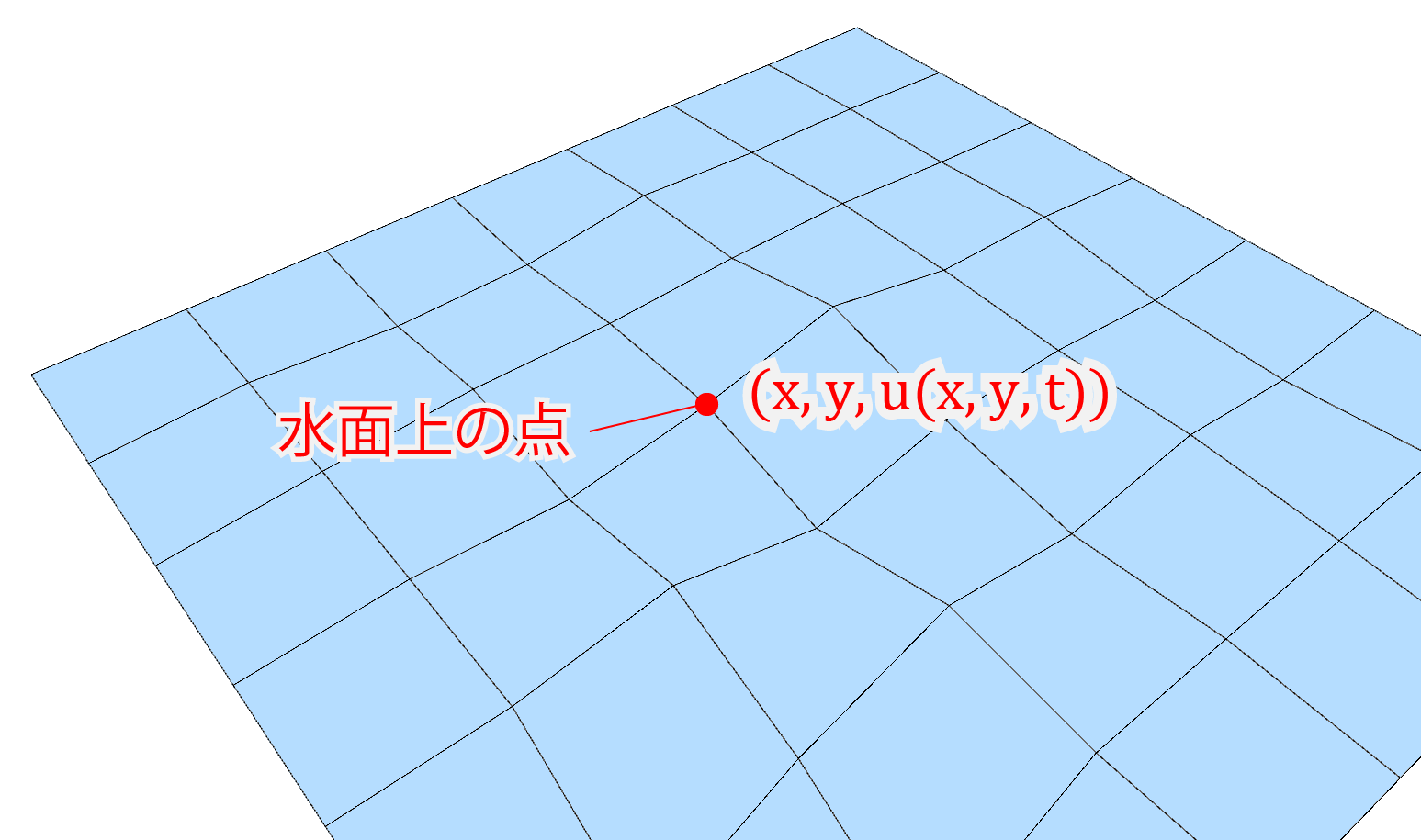
水面メッシュの点$P(x,y,u(x,y))$ における長さ1の法線ベクトル $ \vec{n}$の計算方法を軽く紹介します。
法線ベクトルの計算は、C#では以下のような実装になっています。
// 法線の計算
float dudx = (waveTable[xi + 1, yi] - waveTable[xi - 1, yi]) / dx;
float dudy = (waveTable[xi, yi] - waveTable[xi - 1, yi]) / dy;
normals[xi + yi * resolution.x] = new Vector3(-dudx, 1.0f, -dudy).normalized;
\vec{n} =
\begin{vmatrix}
- \Delta u_x / \Delta x \\
- \Delta u_y / \Delta y \\
1
\end{vmatrix}
\\\\
\Delta u_x = u(x + \Delta x, y) - u(x, y)
\\\\
\Delta u_y = u(x, y + \Delta y) - u(x, y)
法線ベクトルの導出(ちょっと長いです)
■法線ベクトルの導出
水面にある点$P$からx方向に少しずれた位置にある水面上の点 $Q$と、
y方向に少しずれた位置にある水面上の点 $R$ を考えます。
$\vec{PQ}$ と $\vec{PR}$ の外積を計算することで、点Pの法線方向のベクトルを得ることができます。

■法線の計算
点P, Q, R は以下のようなベクトル形式で表すことができます。
P = \begin{pmatrix}
x \\
y \\
u(x,y)
\end{pmatrix}
Q = \begin{pmatrix}
x + \Delta x \\
y \\
u(x+\Delta x,y)
\end{pmatrix}
R = \begin{pmatrix}
x \\
y + \Delta y \\
u(x,y + \Delta y)
\end{pmatrix}
$\vec{PQ}$ と $\vec{PR}$ は以下のようなベクトルになります。
\vec{PQ} = \begin{pmatrix}
\Delta x \\
0 \\
u(x+\Delta x,y) - u(x,y)
\end{pmatrix}
= \begin{pmatrix}
\Delta x \\
0 \\
\Delta u_x
\end{pmatrix}
\vec{PR} = \begin{pmatrix}
0 \\
dy \\
u(x,y+\Delta y) - u(x,y)
\end{pmatrix}
= \begin{pmatrix}
0 \\
dy \\
\Delta u_y
\end{pmatrix}
$\vec{PQ}$ と $\vec{PR}$ の外積を計算すると、以下のようになります。
\vec{PQ} \times \vec{PR}
=
\begin{pmatrix}
\Delta x\\
0 \\
\Delta u_y
\end{pmatrix}
\times
\begin{pmatrix}
0 \\
\Delta y \\
\Delta u_y
\end{pmatrix}
=
\begin{pmatrix}
- \Delta y \Delta u_x \\
- \Delta x \Delta u_y \\
\Delta x \Delta y
\end{pmatrix}
=
\begin{pmatrix}
- \Delta u_x / \Delta x \\
- \Delta u_y / \Delta y \\
1
\end{pmatrix}
\Delta x \Delta y
$ \vec{PQ} \times \vec{PR} $ を正規化すると、係数の $ \Delta x \Delta y $ は消え、長さ1の法線ベクトル $\vec{n}$ を得ます。
| \vec{PQ} \times \vec{PR} |
= \begin{vmatrix}
- \Delta u_x / \Delta x \\
- \Delta u_y / \Delta y \\
1
\end{vmatrix}
= \vec{n}
z方向下向きの法線ベクトルが欲しいときは、-1倍します。
\begin{vmatrix}
\Delta u_x / \Delta x \\
\Delta u_y / \Delta y \\
-1
\end{vmatrix}
(法線ベクトルの導出おわり)
$5. C# Job Systemで波動方程式を実装する
§4. の 波動シミュレーションをJobSystemに移植します。
移植に当たって以下のようなcsファイルを用意しました。
| csファイル名 | 説明 |
|---|---|
| WaveParameter.cs | 波のパラメータを保持する構造体 |
| WaveSpeedJob.cs | 波動方程式を計算し、波の速度を更新するジョブ |
| WavePositionJob.cs | 波の速度を利用して、波の位置を更新するジョブ。 WaveSpeedJobの後に実行 |
| WaveMesh2D_Job.cs | 波の状態をMeshへ反映するMonoBehaviourクラス |
| WaveJobSystem.cs | JobSystemを実行する大元のMonoBehaviourクラス |
Unity上での実装を見たい方は、GitHubリポジトリをご覧ください
https://github.com/rngtm/Unity-JobSystem-WaveEquation
ソースコード
WaveParameter.cs (波のパラメータの構造体)
using System;
using UnityEngine;
/// <summary>
/// 波のパラメータ
/// </summary>
[Serializable]
public struct WaveParameter
{
public int NumX; // グリッドの数(X)
public int NumY; // グリッドの数(Y)
public float DeltaX; // グリッド間の距離(X方向)
public float DeltaY; // グリッド間の距離(Y方向)
public float V; // 波が伝わる速さ
public Vector2 MeshSize; // メッシュの大きさ
}
WaveSpeedJob.cs (波の速さを更新するジョブ)
using Unity.Burst;
using Unity.Collections;
using Unity.Jobs;
/// <summary>
/// 波の加速度・速度を計算するJob
/// </summary>
[BurstCompile]
public struct WaveSpeedJob : IJobParallelFor
{
[ReadOnly] public WaveParameter Parameter;
[ReadOnly] public NativeArray<float> WaveArray; // 波の変位u
public NativeArray<float> Accel; // 波の加速度 (d/dt)^2 u
public NativeArray<float> Speed; // 波の速さ (d/dt) u
public float DeltaTime;
public void Execute(int index)
{
int xi = index % Parameter.NumX;
int yi = index / Parameter.NumX;
// 端点の場合は何もしない
if (xi == 0 || xi == Parameter.NumX - 1) return;
if (yi == 0 || yi == Parameter.NumY - 1) return;
float wave = GetWave(xi, yi);
float waveX1 = GetWave(xi - 1, yi);
float waveX2 = GetWave(xi + 1, yi);
float waveY1 = GetWave(xi, yi - 1);
float waveY2 = GetWave(xi, yi + 1);
float d2ux = (waveX1 + waveX2 - 2f * wave) / (2f);
float d2uy = (waveY1 + waveY2 - 2f * wave) / (2f);
float dvdx = (Parameter.V / Parameter.DeltaX);
Accel[index] = dvdx * dvdx * (d2ux + d2uy) * DeltaTime;
Speed[index] += Accel[index] * DeltaTime;
}
float GetWave(int xi, int yi)
{
return WaveArray[xi + yi * Parameter.NumX];
}
}
WavePositionJob.cs (波の位置(変位u)を更新するジョブ)
using Unity.Burst;
using Unity.Collections;
using Unity.Jobs;
/// <summary>
/// 波のSpeedを元にして、波の変位uを更新するJob
/// </summary>
[BurstCompile]
public struct WavePositionJob : IJobParallelFor
{
[ReadOnly] public float DeltaTime;
[ReadOnly] public NativeArray<float> Speed; // 波の速さ (d/dt) u
public NativeArray<float> Position; // 波の速さ (d/dt) u
public void Execute(int index)
{
// 波の変位の更新
Position[index] += Speed[index] * DeltaTime;
}
}
WaveMesh2D_Job.cs (波のメッシュを管理するMonoBehaviourクラス)
using System.Linq;
using Unity.Collections;
using UnityEngine;
/// <summary>
/// 波のメッシュを管理するクラス(C# JobSystemから動かす)
/// </summary>
[RequireComponent(typeof(MeshFilter))]
[RequireComponent(typeof(MeshRenderer))]
public class WaveMesh2D_Job : MonoBehaviour
{
private WaveParameter parameter;
private NativeArray<float> waveTable;
private Vector2Int resolution; // メッシュ解像度
private Mesh mesh = null;
private Vector3[] vertices = null;
private Vector3[] normals = null;
/// <summary>
/// 波の初期化
/// </summary>
public void Create(WaveParameter parameter, NativeArray<float> waveArray)
{
this.parameter = parameter;
resolution = new Vector2Int(parameter.NumX, parameter.NumY);
waveTable = waveArray;
CreateMesh();
}
/// <summary>
/// メッシュ作成
/// </summary>
void CreateMesh()
{
mesh = new Mesh();
// 頂点の作成
int vertexCount = resolution.x * resolution.y;
// 頂点・法線・UV作成
vertices = new Vector3[vertexCount];
normals = new Vector3[vertexCount].Select(x => new Vector3(0, 1, 0)).ToArray();
var uv = new Vector2[vertexCount];
int vi = 0;
for (int yi = 0; yi < resolution.y; yi++)
{
for (int xi = 0; xi < resolution.x; xi++)
{
vertices[vi] = GetVertexPosition(xi, yi);
uv[vi] = new Vector2((float)xi / (resolution.x - 1), (float)yi / (resolution.y - 1));
vi++;
}
}
// 頂点インデックス作成
int triangleCount = (resolution.x - 1) * (resolution.y - 1) * 6;
int[] triangles = new int[triangleCount];
int offset = 0;
int ti = 0;
for (int yi = 0; yi < resolution.y - 1; yi++)
{
for (int xi = 0; xi < resolution.x - 1; xi++)
{
triangles[ti++] = offset;
triangles[ti++] = offset + resolution.x;
triangles[ti++] = offset + 1;
triangles[ti++] = offset + resolution.x;
triangles[ti++] = offset + resolution.x + 1;
triangles[ti++] = offset + 1;
offset += 1;
}
offset += 1;
}
mesh.SetVertices(vertices);
mesh.uv = uv;
mesh.SetTriangles(triangles, 0);
GetComponent<MeshFilter>().mesh = mesh;
}
/// <summary>
/// メッシュ更新
/// </summary>
public void UpdateMesh()
{
float dx = parameter.MeshSize.x / resolution.x;
float dy = parameter.MeshSize.y / resolution.y;
int vi = 0;
for (int yi = 0; yi < resolution.y; yi++)
{
for (int xi = 0; xi < resolution.x; xi++)
{
vertices[vi] = GetVertexPosition(xi, yi);
vi++;
}
}
for (int yi = 1; yi < resolution.y - 1; yi++)
{
for (int xi = 1; xi < resolution.x - 1; xi++)
{
// 法線の計算
float dudx = (GetWave(xi + 1, yi) - GetWave(xi - 1, yi)) / parameter.DeltaX;
float dudy = (GetWave(xi, yi) - GetWave(xi - 1, yi)) / parameter.DeltaY;
normals[xi + yi * resolution.x] = new Vector3(-dudx, 1.0f, -dudy).normalized;
}
}
mesh.SetVertices(vertices);
mesh.SetNormals(normals);
}
private Vector3 GetVertexPosition(int x, int y)
{
return new Vector3(
(float) x / resolution.x * parameter.MeshSize.x - parameter.MeshSize.x / 2f,
GetWave(x, y),
(float) y / resolution.y * parameter.MeshSize.y - parameter.MeshSize.y / 2f
);
}
private float GetWave(int x, int y)
{
return waveTable[x + y * resolution.x];
}
}
WaveJobSystem.cs (JobSystemを実行するMonoBehaviourクラス)
using Unity.Collections;
using Unity.Jobs;
using UnityEngine;
public class WaveJobSystem : MonoBehaviour
{
[SerializeField] private WaveMesh2D_Job waveMesh = null;
[SerializeField] private WaveParameter parameter = new WaveParameter();
private NativeArray<float> accelArray;
private NativeArray<float> speedArray;
private NativeArray<float> waveArray;
void Start()
{
// Native Arrayのメモリ割り当て
int arrayLength = parameter.NumX * parameter.NumY;
accelArray = new NativeArray<float>(arrayLength, Allocator.Persistent);
speedArray = new NativeArray<float>(arrayLength, Allocator.Persistent);
waveArray = new NativeArray<float>(arrayLength, Allocator.Persistent);
// 波の初期状態の設定
InitializeWave();
// Mesh作成
waveMesh.Create(parameter, waveArray);
}
private void FixedUpdate()
{
RunJob();
waveMesh.UpdateMesh();
}
/// <summary>
/// ジョブの実行
/// </summary>
private void RunJob()
{
float deltaTime = Time.fixedDeltaTime;
var speedJob = new WaveSpeedJob
{
Accel = accelArray,
Speed = speedArray,
WaveArray = waveArray,
Parameter = parameter,
DeltaTime = deltaTime,
};
var speedHandle = speedJob.Schedule(speedArray.Length, 1);
var positionJob = new WavePositionJob
{
Speed = speedArray,
Position = waveArray,
DeltaTime = deltaTime,
};
var positionHandle = positionJob.Schedule(speedArray.Length, 1, speedHandle);
positionHandle.Complete();
}
/// <summary>
/// 波の初期化
/// </summary>
private void InitializeWave()
{
Vector2 center = new Vector2(1f, 1f);
int i = 0;
for (int yi = 0; yi < parameter.NumY; yi++)
{
for (int xi = 0; xi < parameter.NumX; xi++)
{
var p = GetVertexPosition(xi, yi);
float r = (new Vector2(p.x, p.z) - center).magnitude;
float h = Mathf.Exp(-r * 8.0f) * 2.0f;
h = Mathf.Clamp01(h);
waveArray[i++] = h;
}
}
}
/// <summary>
/// 頂点座標取得
/// </summary>
/// <param name="x"></param>
/// <param name="y"></param>
/// <returns></returns>
private Vector3 GetVertexPosition(int x, int y)
{
return new Vector3(
(float) x / parameter.NumX * parameter.MeshSize.x - parameter.MeshSize.x / 2f,
GetWave(x, y),
(float) y / parameter.NumY * parameter.MeshSize.y - parameter.MeshSize.y / 2f
);
}
/// <summary>
/// 波の取得
/// </summary>
/// <param name="x"></param>
/// <param name="y"></param>
/// <returns></returns>
private float GetWave(int x, int y)
{
return waveArray[x + y * parameter.NumX];
}
/// <summary>
/// NativeArrayの解放 (確保したNativeArrayは自分で開放する必要がある)
/// </summary>
private void OnDestroy()
{
waveArray.Dispose();
speedArray.Dispose();
accelArray.Dispose();
}
}
JobSystemのBurst対応について
BurstCompileアトリビュートをJobの頭につけることで、Burst対応されます。
[BurstCompile]
public struct WavePositionJob : IJobParallelFor
{
...
$6. ShaderGraphで水を描画する
水の描画方法は複数考えられます。
・地面のレンダリング結果に水面を上から重ねる
・地面レンダリングのUVを水面の法線でゆがませる
・光を水面で屈折させて地面を描画する
など
今回はRayを水面で屈折させて地面を描画することにしてみました。
Rayの屈折
Rayを水面で屈折させて、地面を描画します。
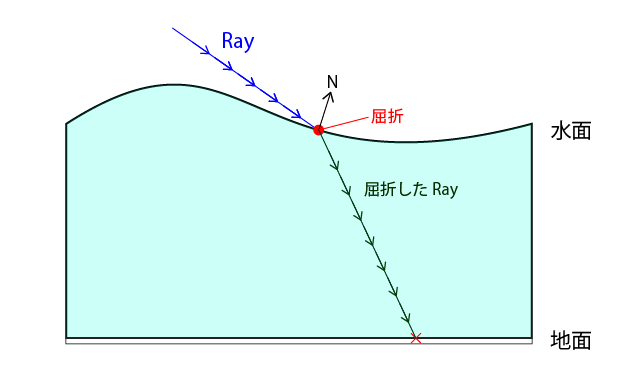
具体的な手順
- Cameraから、水面メッシュへ向けてRayを飛ばす
- メッシュ上の法線を利用して、Rayの向きを屈折させる
- 屈折したRayが地面にぶつかった位置の座標をテクスチャ座標として利用して、地面テクスチャを描画する
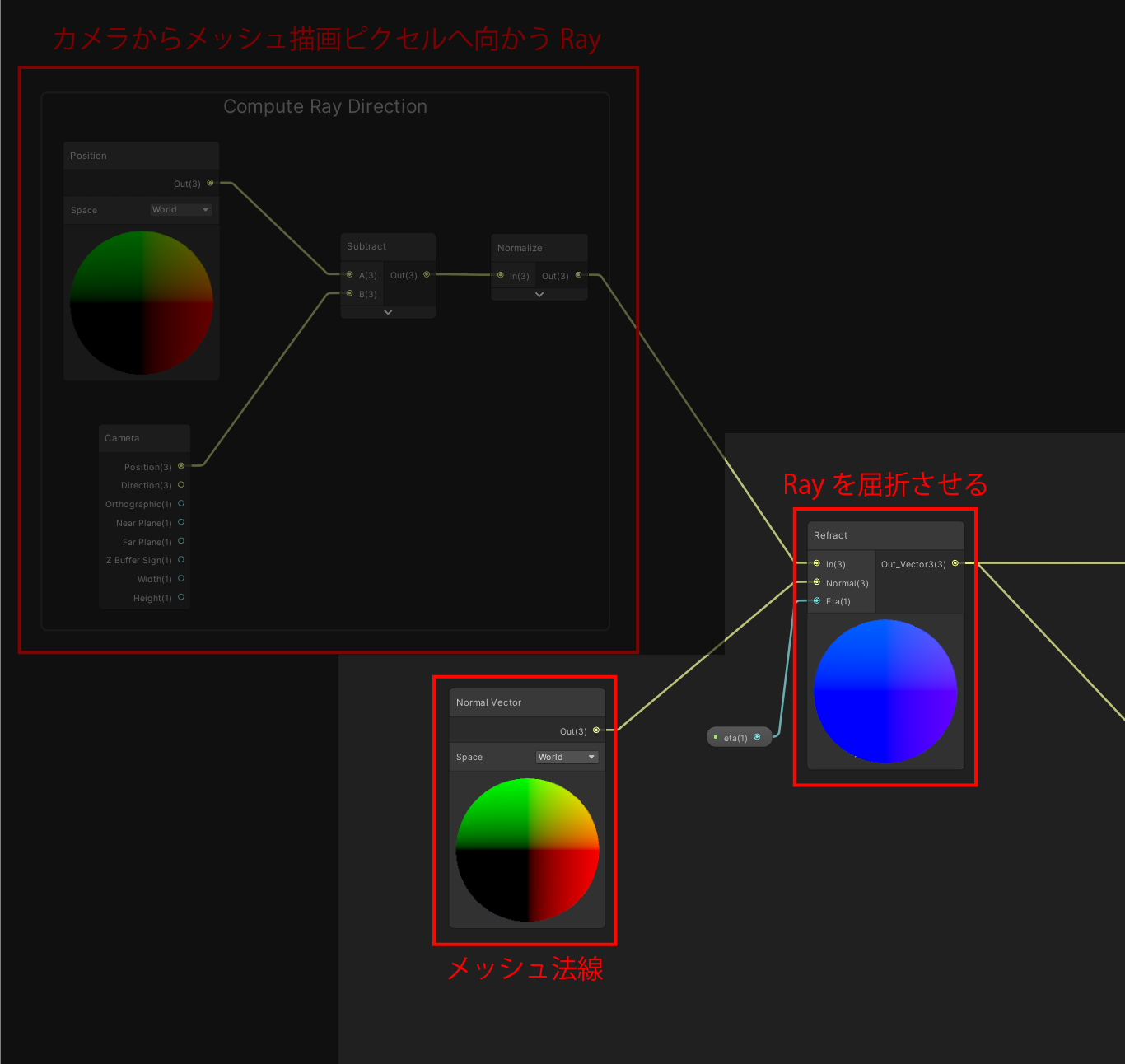
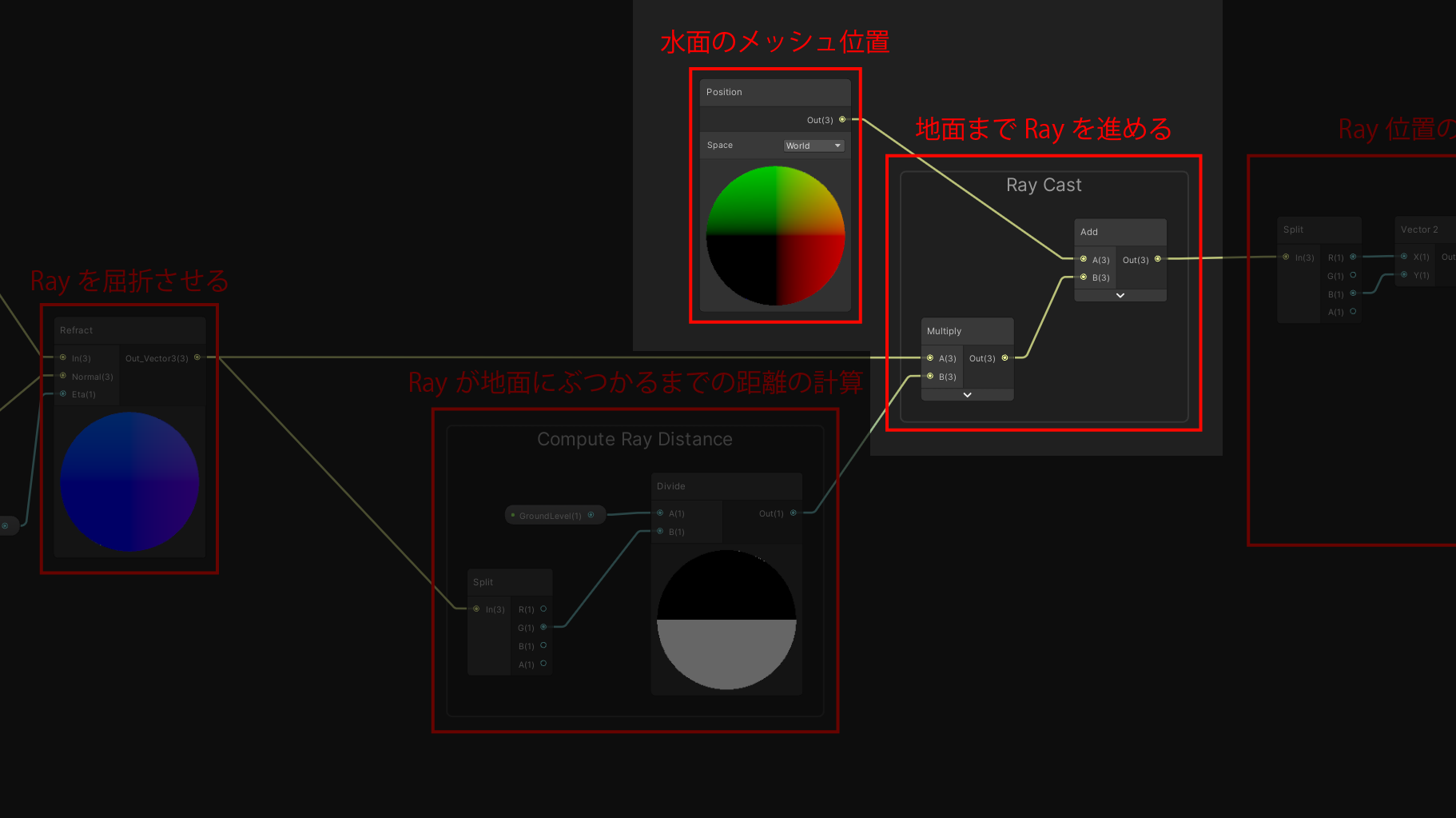
ShaderGraphの実装
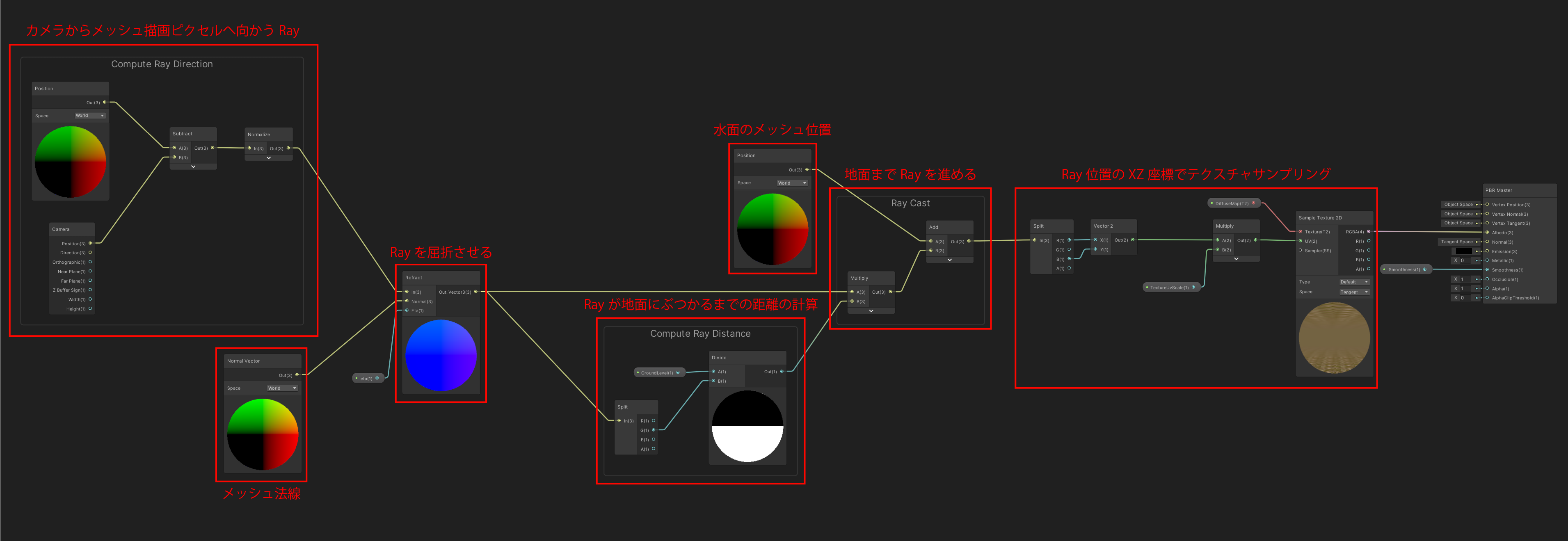
Ray向きの計算部分
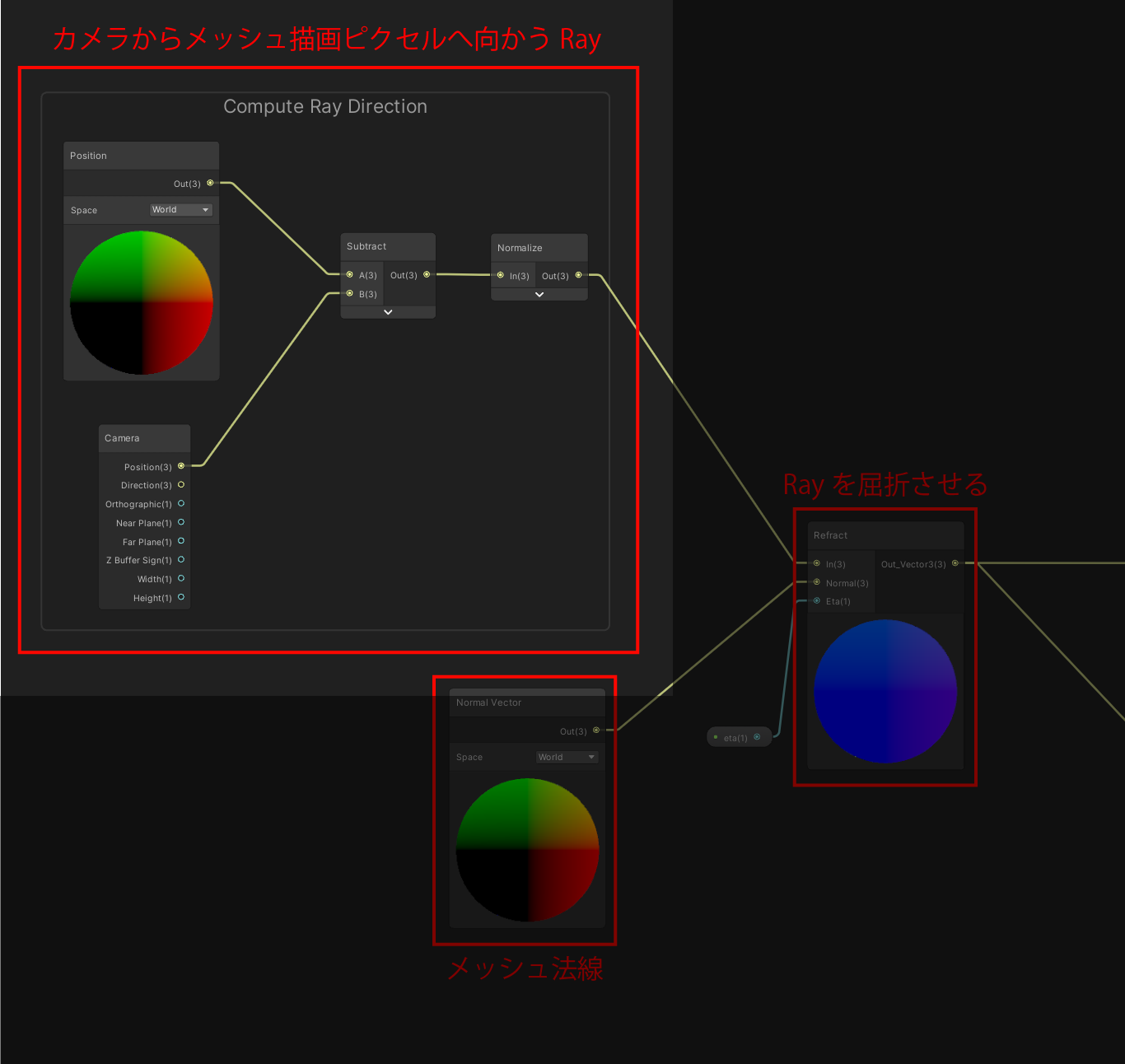
Rayの屈折部分
ここではメッシュ法線を利用して、Rayの向きを屈折させています。
カスタムノード Refract
ShaderGraphには屈折させるノードは存在しないので、カスタムノードでRefract(屈折)ノードを作成しました。
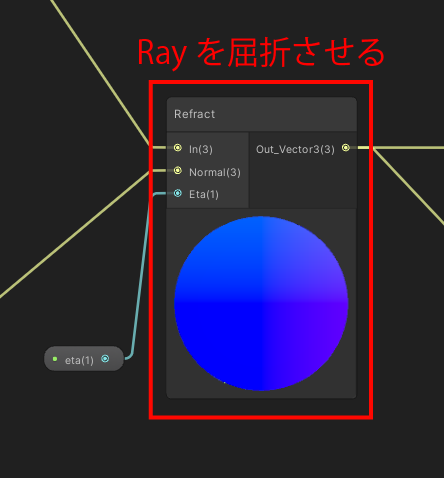
カスタムノード Refractの実装について
OutDir = refract(RayDir, Normal, eta);
RayDir, Normal について
RayDirはRayの向き、NormalはRayとメッシュが当たる位置の法線Nです。
etaについて
etaは屈折率の比を表しています。
空気(1.0)から水(1.333)へ入射する場合、はeta = 0.75になります。
eta = \frac{1.0}{1.333} \approx 0.75
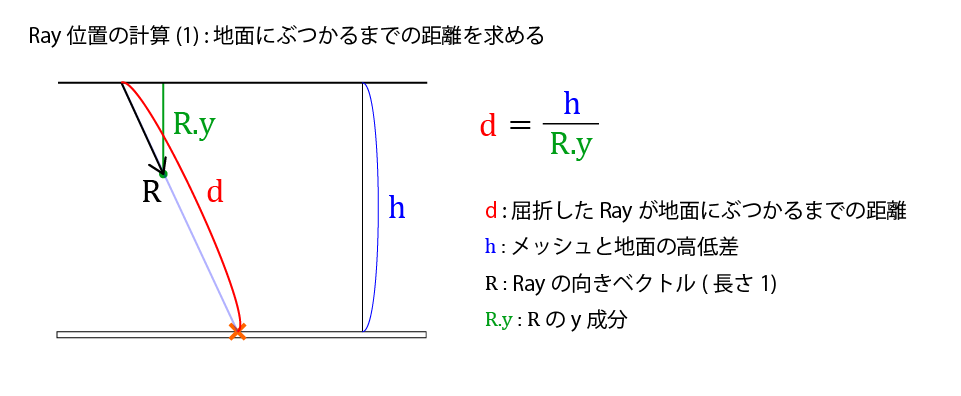
Rayの進む距離の計算部分
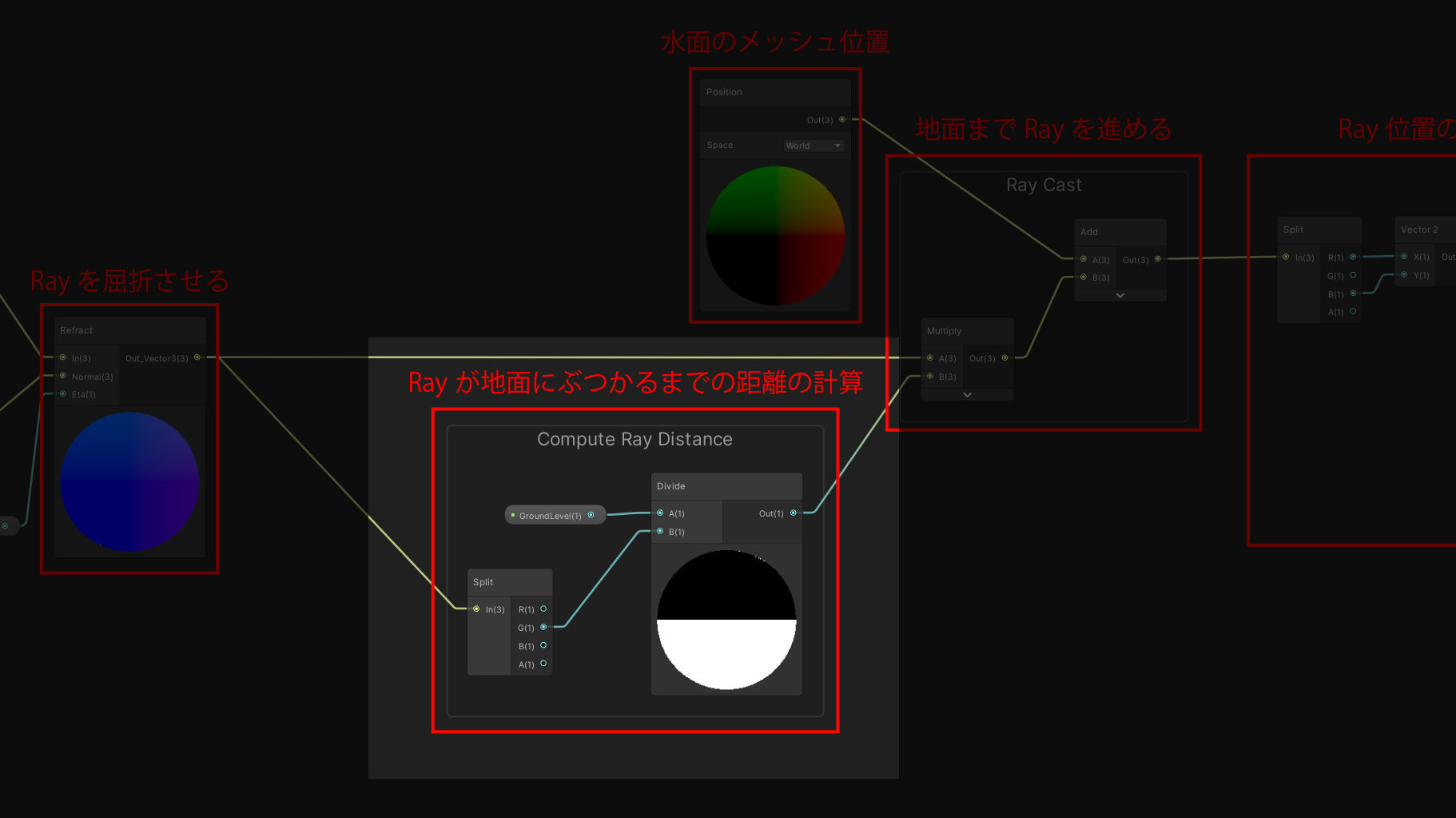
ここでは、Rayが地面にぶつかるまでの距離を計算しています。
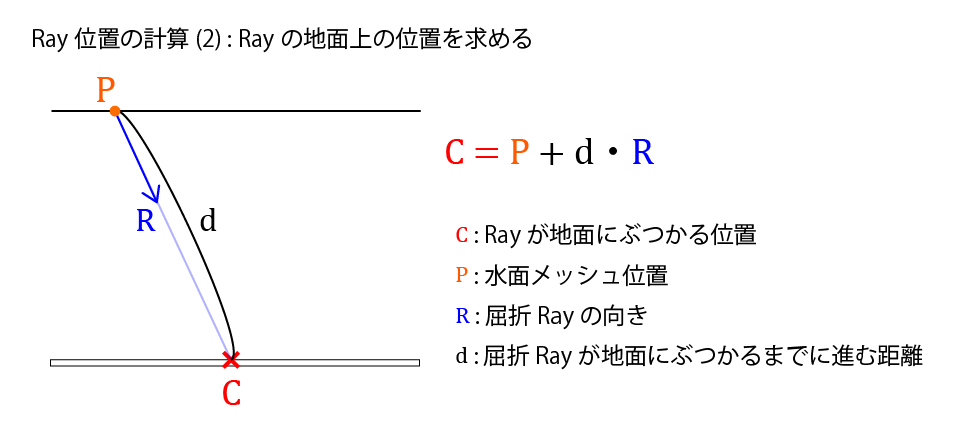
Ray位置の計算
ここでは、Rayの地面上の位置を計算しています。
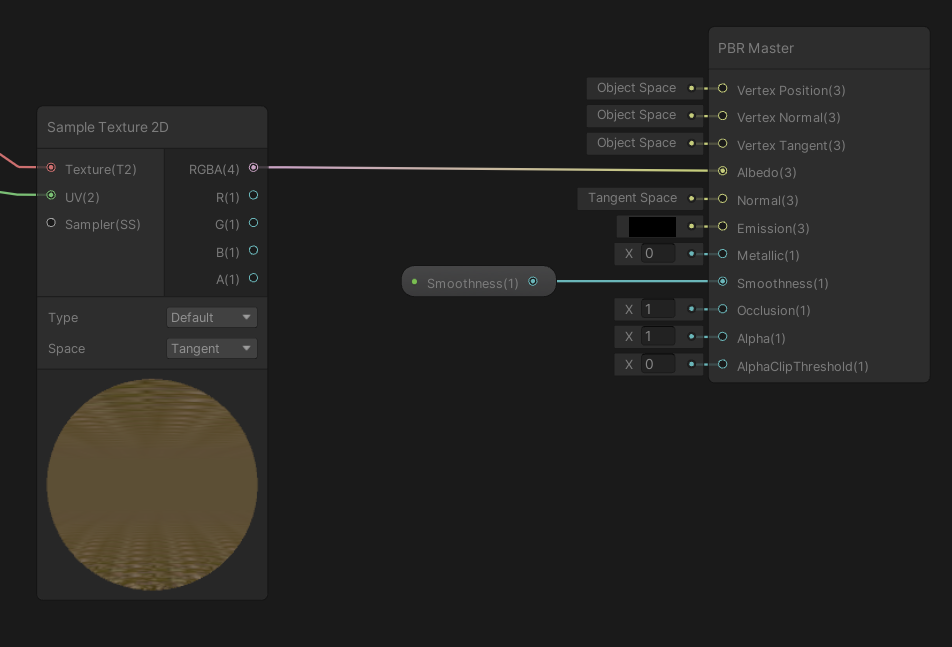
地面テクスチャサンプリング処理
地面のRayのXZ座標を使って地面テクスチャをサンプリングしています。
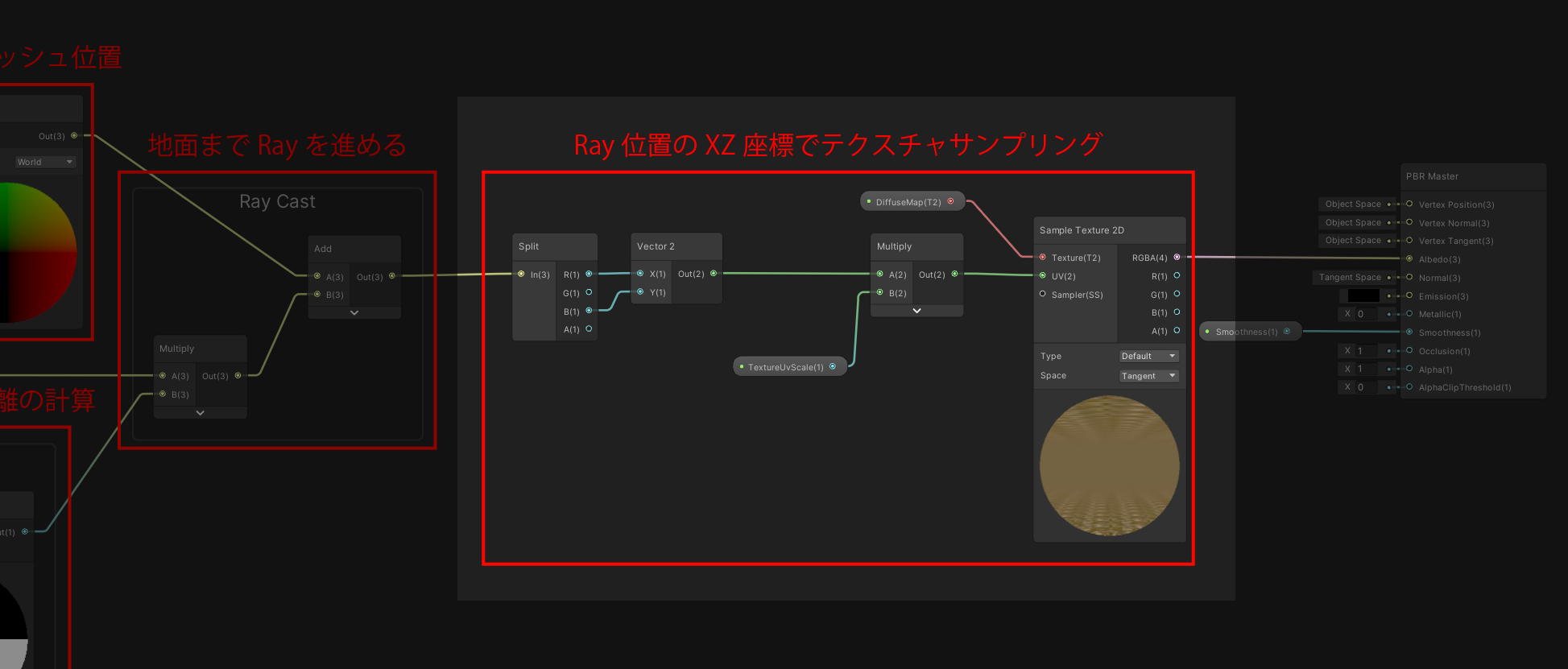
サンプリング結果は、Albedoとして出力します。
結果