21年5月30日に、SDF Editorのソースコードが公開され、
より簡単にGLSL用のコードが出力できるようになりました。
下記記事をごらんいただき、本記事は下記記事の参考としてください。
【改良版】SDF EditorでShadertoyやGLSLのモデリングが劇的に簡単に!
21/05/25 この記事に続く完結編です->https://qiita.com/quittardis/items/488ec98983367ce1bd78
2日前にQuiitaにポストしたばかりhttps://qiita.com/quittardis/items/7a0d23359fcebaeb21a6
であるが、"SDF Editor" https://joetech.itch.io/sdf-editor
からなんとかGLSLコードをひねりだす工夫だが、前のより良いアプローチがあったので紹介する。
以前のバージョンでは、"SDF Editor"の出力する回転とトランスレーションの階層的なデータを
扱うことができなかったが、今回の"cnvSDF2.py"は"SDF Editor"の吐き出すjsonファイルを
リカーシブ(再帰的)に読み込んでSDFモデルにrotationとtranslationを階層的に配置できる。
また、楕円体以外のSDFを扱えるようにする拡張も簡単になった。
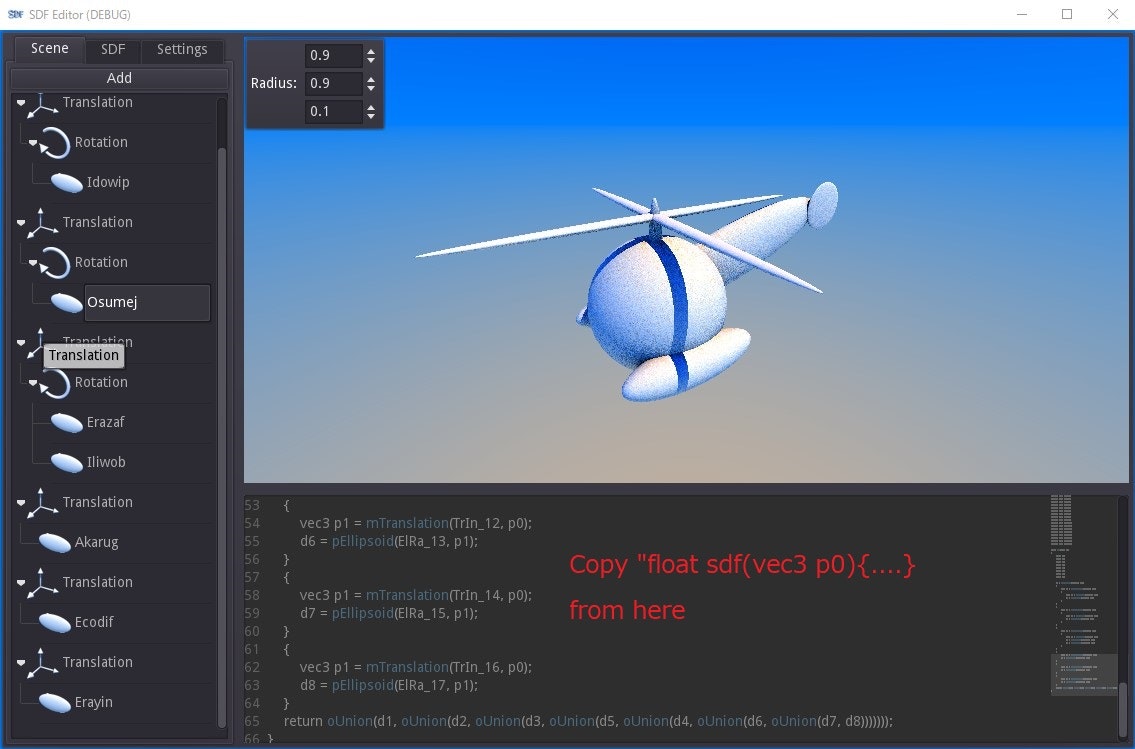
これによって、上図のようなモデルのローターを回すとか、複雑なモデルをデザインしやすくなる。
下図は上のモデリング結果をShadertoyで表示した結果。

以下にgitのリンクを示す。
https://github.com/ultrahamlet/cnvSDF2
リアルタイム表示 http://dcf.jp/viewSDF2.html
SDF chopper
Shadertoy.com
https://www.shadertoy.com/view/NtXGRH
まだ、ポストしていない最新版では楕円体以外のSDFプリミティブをハンドルできる。
"SDF assorted" with cnvSDF3 which can handle other SDF primitives
https://www.shadertoy.com/view/NlfGz4
以下はコンバーターで、sample.json でセーブした結果を
python cnvSDF2.py
で表示プログラムの変数を得る。
詳しくはgitのReadmeを参考にしていただきたい。
cnvSDF2.py bug fixed 21/05/24 rot = rotate_x(v0)*rotate_y(v1)*rotate_z(v2) -> rot = rotate_xyz(v0,v1,v2) gitを参照
bugfixed 21/05/21 rot = rotate_x(v0)*rotate_z(v2) -> rot = rotate_x(v0)*rotate_y(v1)*rotate_z(v2)
# 21/05/25 修正 rotate_xyz
import json
import numpy as np
# rotation matrix
def rotate_xyz(degx,degy,degz):
# degree to radian
r = np.radians(degx)
cr = np.cos(r)
sr = np.sin(r)
r = np.radians(degy)
cp = np.cos(r)
sp = np.sin(r)
r = np.radians(degz)
cy = np.cos(r)
sy = np.sin(r)
R_xyz = np.matrix((
(cy*cp, cy*sp*sr-sy*cr, cy*sp*cr+sy*sr),
(sy*cp, sy*sp*sr+cy*cr, sy*sp*cr-cy*sr),
(-sp, cp*sr, cp*cr)
))
return R_xyz
global gcount
global pcount
gcount = 1
pcount = 0
def total(mf):
#print(">>>> ",mf)
global gcount
global pcount
if(len(mf) < 3):
prm = 'primitive'
spos = prim[pcount][1].replace('Vector3','vec3')
#print(">>> ",strm)
if prim[pcount][0] == 'pEllipsoid':
#prm = 'vec3 ElRa_' + str(gcount) + ' = ' + spos + ';'
# rotation string -> values
prm = 'vec3 ElRa_' + str(gcount) + ' = ' + spos + ';'
if prim[pcount][0] == 'pBox':
prm = 'vec3 BoSi_' + str(gcount) + ' = ' + spos + ';'
print(prm)
gcount += 1
pcount += 1
return
modi2 = mf[1]
#print('>>>>>>>>>>>>>>>>>>>>>>>>>> ',modi2)
if mf[0] == 'mRotation':
rv = mf[2] #totatuon value
rt = 'mat3 RoIn_'+str(gcount)
#
t = rv.replace('Vector3(','')
t = t.replace(')','')
u = t.split(',')
# get float rotation value
v0 = -float(u[0])
v1 = -float(u[1])
v2 = -float(u[2])
#rot = rotate_x(v0)*rotate_z(v2)
rot = rotate_xyz(v0,v1,v2)
#rot = rotate_x(v0)*rotate_y(v1)*rotate_y(v2)
e = np.linalg.inv(rot) #inverse matrix
# output matrix
strm = str(e)
strm = strm.replace('[[' ,'mat3(')
strm = strm.replace(']]' ,');')
strm = strm.replace(' ' ,'_')
strm = strm.replace('\n' ,'')
strm = strm.replace(']_[' ,'_')
strm = strm.replace('_' ,',')
strm = strm.replace('(,' ,'( ')
#
while ',,' in strm:
strm = strm.replace(',,' ,',')
strm = strm.replace(',)' ,')')
#
print(rt,'=', strm)
if mf[0] == 'mTranslation':
spos = mf[len(mf)-1].replace('Vector3(','')
spos = spos.replace(')','')
u = spos.split(',')
v0 = -float(u[0])
v1 = -float(u[1])
v2 = -float(u[2])
#print('--------------- tr',v0,v1,v2)
rt = 'vec3 TrIn_'+str(gcount) #header
rt = rt + ' = vec3(' + str(v0) +' ,'+ str(v1) + ' ,' + str(v2) + ');'
print(rt)
#spos = mf[len(mf)-1].replace('Vector3','vec3') + ';'
#print(rt,'=', spos)
gcount += 1
for md in modi2:
total(md)
# read json file
f = open('sample.json', 'r')
json_dict = json.load(f)
prim = json_dict['primitives']
j = 0
modi = json_dict['modifiers']
# print('>>>>>>>>>>>>>modifier init >>>>>>>>>>>>> ',modi)
print('//----------------------------------------------------------------')
for md in modi:
#print('>>>>>>>>>>>>>modifier>>>>>>>>>>>>> ',md)
total(md)
j += 1
print('//----------------------------------------------------------------')