はじめに
ROSの環境設定を行った際の忘備録です
VirtualBoxにUbuntuが導入済みの状態からを想定しています(下記別記事参照)
https://qiita.com/pez/items/a3ef1855f7e1e0ed3dfd
環境・バージョン
OS: Windows11 Pro (64bit)/Windows10 Pro (64bit) (両方で確認済)
VirtualBox: 6.1.38 (Ubuntu18.04.3, GUI環境)
ROS: melodic
VirtualBoxのネットワーク設定
WiFiに接続することを前提にしています
他のPCからIPアドレスを指定してVirtualBox内のUbuntuにアクセスできるようにするため下記を実施
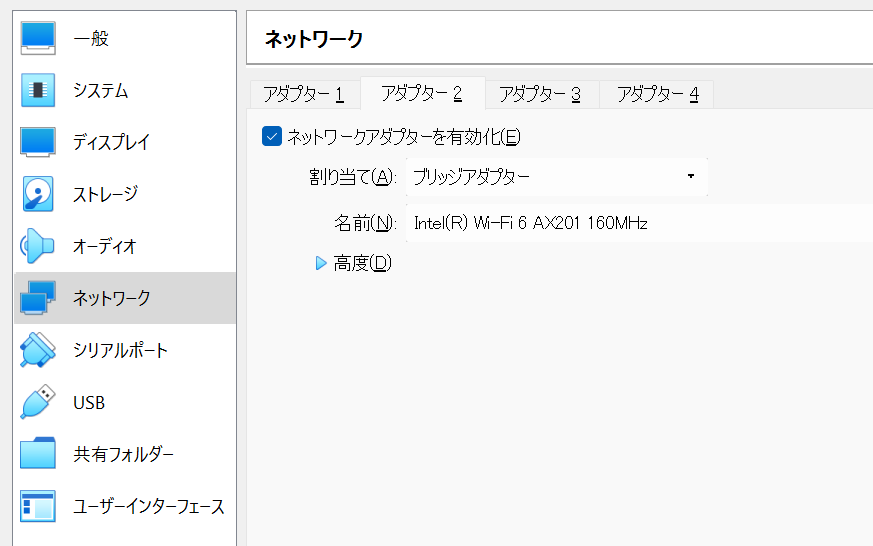
- VirtualBox起動,OSを選択して「設定」⇒ 「ネットワーク」
- 空いている適当なアダプターを選んで有効化チェック
- 割り当てを「ブリッジアタプター」にして「OK」
・Ubuntu18.04を起動し, ifconfigでIPアドレスを確認
(いくつか出てくるがどれが今設定したやつかは・・・勘で判断)
WiFiであれば大抵 192.168.~~~ となっていると思います

・他のPC(同じネットワーク内)からpingが通るか試してみる
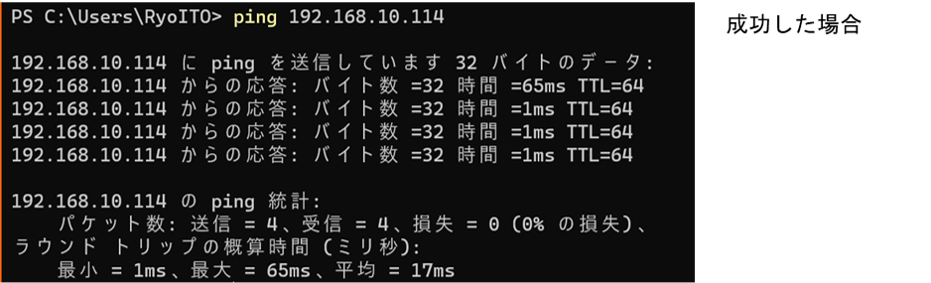
逆も試して相互に通ることを確認.
通らなかった場合に疑うこと
・Windowsのファイヤーウォール
・IPアドレス間違い
・同じネットワーク内にない
UbuntuへROSをインストール
参考 : ROS Wiki
aptへのROSのダウンロード先の登録
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
ダウンロードのための公開鍵の取得
$ sudo apt install curl
$ curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
ROSのインストール
$ sudo apt update
$ sudo apt install ros-melodic-desktop-full
環境変数の設定
$ cd
$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
ROSのパッケージインストーラのインストール
$ sudo apt install python-rosinstall python-catkin-tools python-rosdep
ROSの初期設定
$ sudo rosdep init
$ rosdep update
ROSのワークスペースの作成とビルドテスト
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws
$ catkin build
自分のワークスペースをインストール環境に配置する
$ source devel/setup.bash
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
動作確認
$ roscore
⇒ 一番下の行に
started core service [/rosout]
と表示されていれば成功
Ctrl + C で終了