ラジコンヘリの値段がとても安くなっているのに気づいたとき、ラジコンヘリと携帯電話に技術の共通点があることに気づいた。
ラジコンヘリと携帯電話の共通点
- バッテリーを使う。
- 無線通信をする。
- モーターを使う(携帯電話のバイブレーション機能)。
次の記事もドローンと携帯電話の技術との共通性を述べています。
ドローンと携帯電話の共通点
実際、ドローンにはスマートフォンで使われる部品が多く使われており、スマートフォンの爆発的な普及による部品の小型化と低価格化が、ドローン市場の拡大の大きなきっかけになったと言われています。例えば、レース用の自作ドローンに使われるシンプルなフライトコントローラーであれば、数千円程度で購入することができます。
オープンソース化されたライブラリが増えることで、自分が何かアイディアを試すときには、新規性を出す部分以外は既存のライブラリを使うことができます。自分の集中すべき問題にだけ集中できます。
自分の集中すべき問題
論文を書くのならば、論文として何にオリジナリティと意義を設定するのかが問われます。
ビジネスの場合には、どうやって収益を上げつつ、社会に寄与するかを考えなくてはなりません。
自分が何をしたいのか、何ができるのか、何をすることに意味があるのか、その選択では開発を継続できるのか、自分が成長ができるのか。それらを考えつつ、何をどういうアイディアで、その開発チームに寄与できるのかを考えなくてはなりません。それぞれの開発チームの強みは何か、自分の強みは何かを考えることです。そのような考え方の1例としてドローンの分野をあげてみました。
以下に示すドローンで進んできている技術の要素は、確実に他の分野でも使える技術があるはずです。私が作りたいのはドローンじゃないんだという人にも参考になればうれしいです。
ドローン企業の強みは何におくのか?
-
ドローンのハードウェアそのもの
-
ドローンの計算部分にマルチコアを使う例
-
ドローンの計算部分にARMコア付のFPGA(Zynqなど)を使う例
-
Phenox2 の開発者インタビュー記事
- 画像信号を読んできてメモリに保存するような処理をCPUを使わないで全部FPGAでできる
Zynqであれば低レイヤーの信号が使える。 -
Altera FPGA The Revolutionary SoC Flight Controller
-
YouTube Embedded World 2017: Dobby AI Drone — Presented by ZeroTech and Deephi Deep Learning
-
YouTube Intel SoC FPGA-Based Open-Source Drone Platform and Sensing Modules
-
ドローンの計算部分にGPU(TX1)を使う例
-
Parrot社 Jetson TK1の利用
-
ドローンの計算部分にRaspberry Pi Zeroを使う例
悔しいけど、RaspberryPiのみでは、ロール/ピッチ/ヨーに対する加速度/ジャイロ/PID制御からESCへのPWM値計算処理能力不足で機体のふらつきを抑えるのが困難でした。RTOSを使っても処理は追い付かない気がします。
-
ドローンの計算部分にスマートフォンのCPUなどを使う例
-
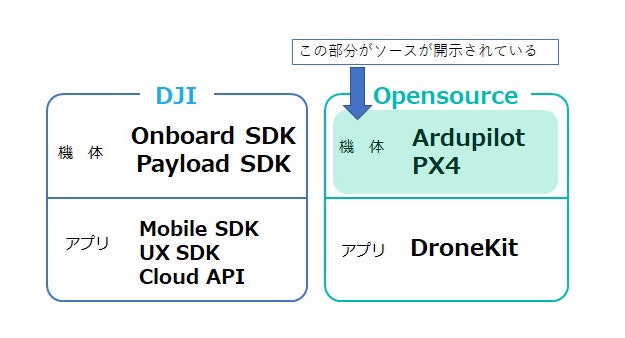
ドローンの制御
Dronecode」、「APM/Ardupilot」、「PX4/Autopilot」の3プロジェクトが存在する。
-
ドローンからの画像の空撮
-
ドローンからの空撮画像の映像伝送
-
ドローンからの空撮による3Dマップの作成
-
ドローンを物の空輸に使う
-
ドローンを無線基地局として使う
-
ドローンを液体の散布に使う。
農薬の散布の自律性がドローンで期待されているポイント。
-
ドローンを建築物の検査に用いる
-
ドローンをジェスチャーで制御する
- DJIのSparkで既に商品化されています。
- ミニドローンを制御するLeap Motionコントローラを作る(ジェスチャー版)
- ミニドローンをRaspberry Piと接続してLeap Motionで飛ばす
-
ドローン バッテリとモーター
- 飛行時間に関係するのがバッテリとモーターです。制御や撮影に使うCPUボードの電力消費量も重要なポイントです。
- ドローンと測量
- [スマートコンストラクション高精度測量サービス] (http://www.komatsu.co.jp/CompanyInfo/press/2016090514493520112.html)
- 飛行時間に関係するのがバッテリとモーターです。制御や撮影に使うCPUボードの電力消費量も重要なポイントです。
建機を使って整地をする場合、はじめに行う作業が「現場の測量」。面積を測るだけと思いがちだが、そこにどれくらいの量の土砂があって、それを削った場合、何台分のトラックで運び出さなければならないかといった予測を立体的に計測して割り出す必要があるのだ。
-
リアルタイム性重視のOSとコーディングしやすさ重視のOSとの協調システム
リアルタイムOSとLinuxとを組み合わせて使うシステムは、既に多くの組込み機器で利用されている。
ドローンの場合もリアルタイム性が要求されるから、Linuxだけで実用的な制御をするには無理がある。
そのため、リアルタイム性重視のOSとコーディングしやすさ重視のOSとの協調システムになっていることが多い。 -
SlideShare のドローンのslideの一例
SlideShare DRONE BORG 第一回ドローンビジネス勉強会資料
SlideShare ドローンの仕組み( #ABC2015S )
SlideShare ドローン向けソフトウェア事業
SlideShare オープンソースを用いたドローンの自律制御ソフトウェア技術
どこに強みをおくのか、それによって、どういう利益が社会的にもたらされるか。
ドローンのフライトコントローラ周りのOSSプロジェクトについて
「OSSエンジニアのための(はじめての!)ドローン勉強会」
SLAM
raulmur/ORB_SLAM2 (https://github.com/raulmur/ORB_SLAM2)
tum-vision/lsd_slam (https://github.com/tum-vision/lsd_slam)
erik-nelson/blam_slam (https://github.com/erik-nelson/blam_slam/tree/master/src)
SilentSys/SLAM (https://github.com/SilentSys/SLAM)
OpenSLAM/awesome-SLAM-list (https://github.com/OpenSLAM/awesome-SLAM-list)
ROSのBlam-SLAMを動かしてみた
ROSのLidarSLAMまとめ
ROSのvSLAMまとめ
FPGA×ROSでFPGAをプラットフォームとしたロボットを実現するプロジェクトOpenReroc
プログラマブルSoCを用いた画像処理ハードウェアのROS準拠コンポーネント化
FPGA処理をROSコンポーネント化する自動設計環境
参考情報
追記
編集部 :
「ArduPilotなら、いろんな形や重さのドローンを自動航行させられるのですね!」
ランディさん :
「そうですね。地上を動くものも、ArduPilotで動かすことができますよ。例えばこれは、自動追尾できるローバーですね。白い方を私がプロポで操作して、黒い方は白い方を完全自動で追いかけています。かわいいね(笑)」
編集部 :
「ArduPilotはユーザー課金ゼロのビジネスモデルになりますが、どのようにして開発を続けているのですか?」
ランディさん :
「実は、ArduPilotの開発費用は何十億とかかっています。でもその開発費用は、ユーザー課金で賄うのではなく、ArduPilotパートナー企業からの支援で成り立っています」