概要
Raspberry Pi で3つのi2cデバイスを同時に動かしてみた で使った
1.距離センサ(VL53L0X)
2.ジャイロ加速度センサ(MPU-6050)
3.PWMドライバ(PCA9685)
を Raspberry Pi Zero で制御して自律飛行ドローン(クワッドコプター)を作ってみようと思いました。
これだけでは自律は難しいですが、改善しながらコツコツ進めていきます。
今回は浮上までの記事です。細かな個所は追って書き加える予定です。
やったこと
1.距離センサ、ジャイロ加速度センサ、PWMドライバを1つのプログラムから制御できるようにする
2.距離センサ値やジャイロ値によりPWMドライバ0~3ポートのPWM出力電圧をそれぞれ変化させる(ここがドローンのプロペラ回転数になる)
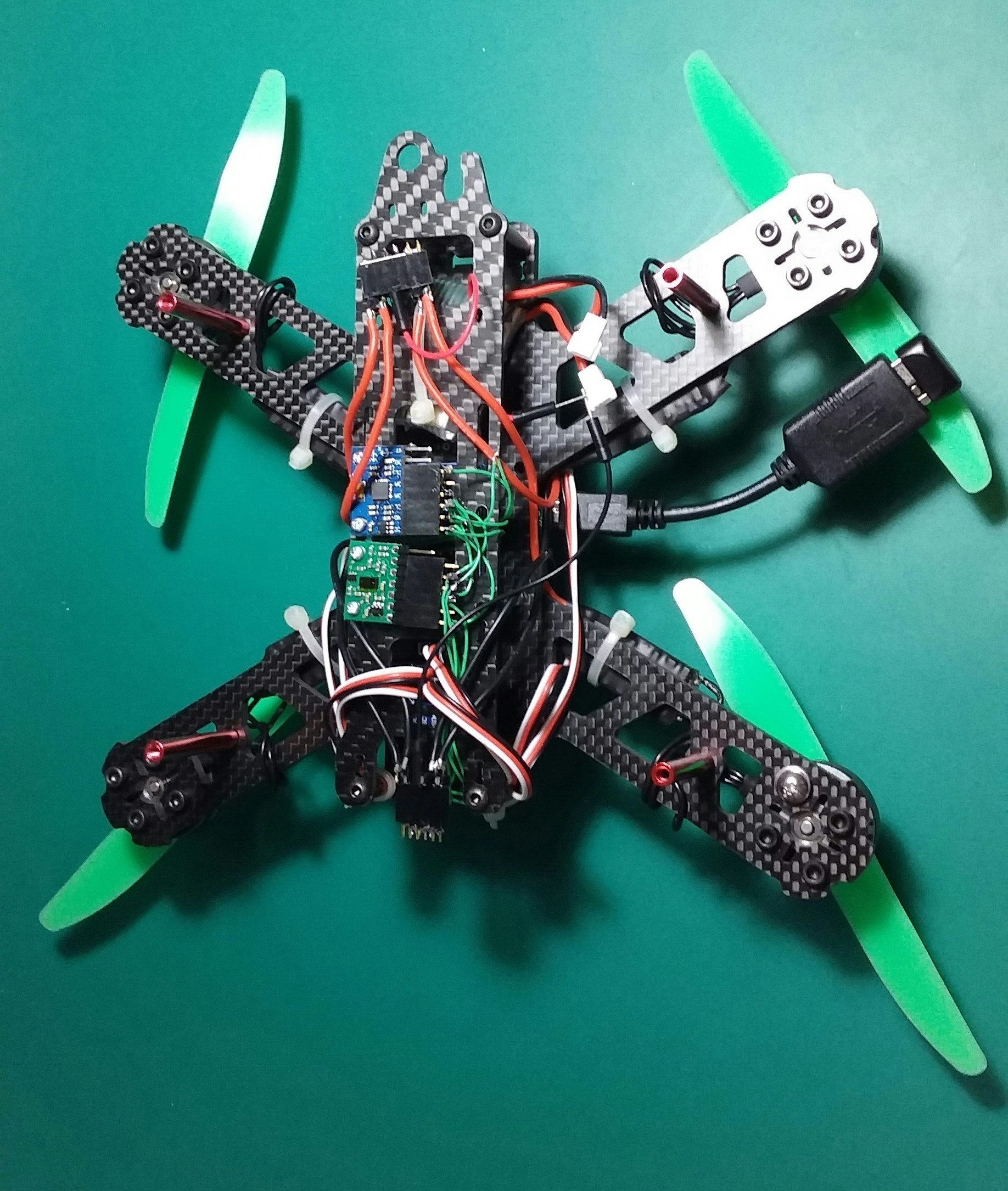
3.実際のドローンフレームにRaspberry Pi Zero、距離センサ、ジャイロ加速度センサ、PWMドライバの実装して配線。更に、ブラシレスモータとESCを実装
4.ブラシレスモータへのPWMパルスを調査して値を決める
5.モータの回転方向を合わせ(隣のモータは逆回転にする)浮上するかテスト
(上面)

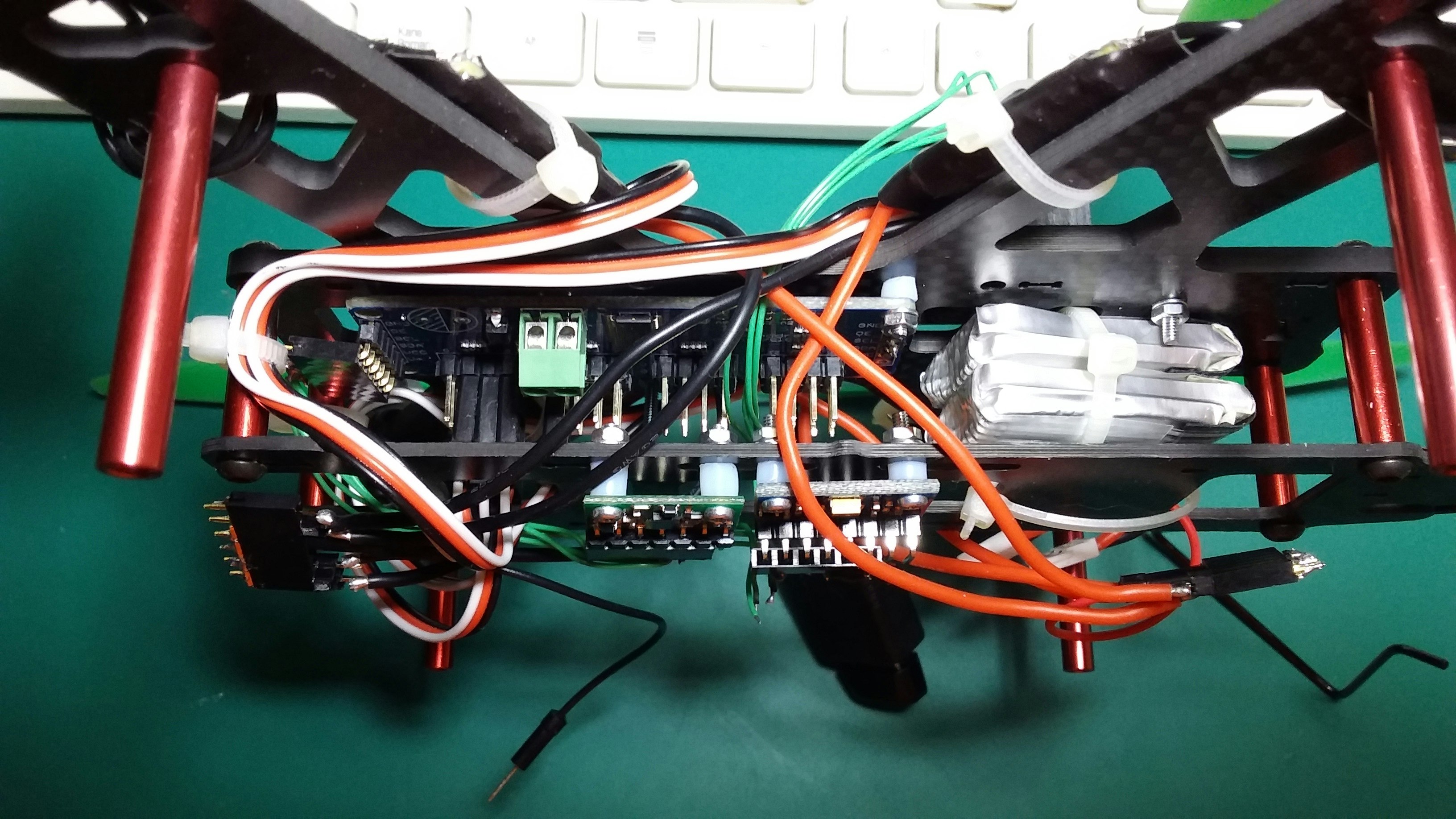
(下面)
(中間層)
結果
Lipoバッテリ2cellにてモータを駆動し、コンマ何秒か浮上させることに成功。
動画はこちら(YouTube)

※勢いよく飛び出しそうなので指で押さえてます
この続きは、Raspberry Pi Zero で自律飛行ドローンを作るぞ(第2回:姿勢制御は簡単にはできないぞ!!)
コード(GitHub)