はじめに
チェビシェフリンクは主にロボットの歩行に使われる、擬似直線を作り出すリンク機構です。かんたんな機構で歩行しているような軌跡を描くので、色々応用できます。
これは私がレゴで作った、リモコン式ロボット。
歩行しているかのような軌跡を描くには、最適なリンクの長さがあります。「この長さを変えたらどうなるか?」という疑問は沸かないですか。このリンク機構を物理的に作れば試せますが、加工しないといけないので、長さの変更は容易ではありません。でも、簡単に試してみたいですね。
シミュレータ
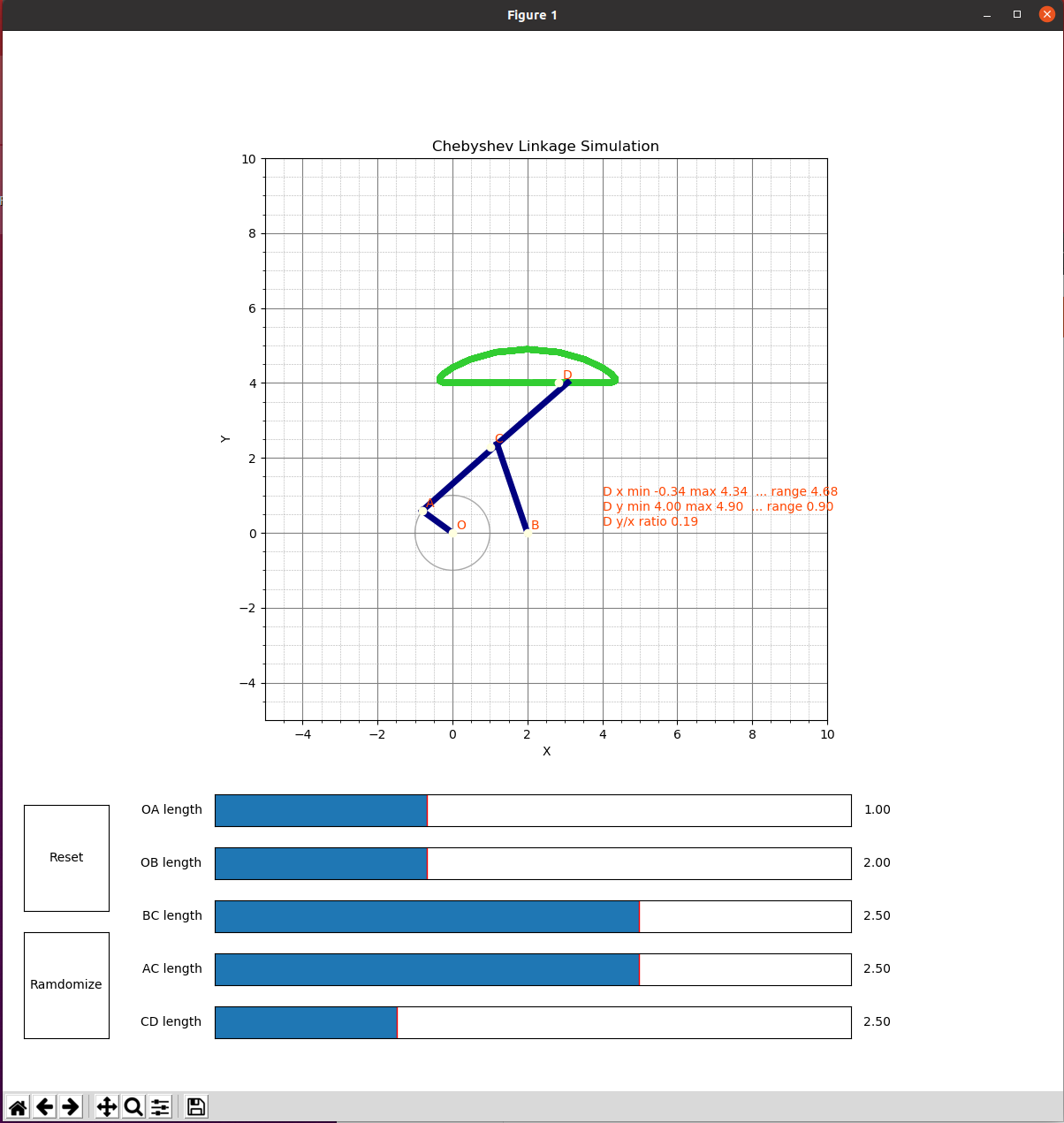
pythonでチェビシェフリンクのシミュレータを作りました。
説明(使い方、特徴)
- 起動方法はreadmeを参照してください。
- 起動時のデフォルトでは「歩行に最適なリンクの長さ」になっています。
- 5つのスライダーを操作すると、長さが変わります。
- Resetボタンを押すと、デフォルトの長さに戻ります。
- Randomizeボタンを押すと、全リンクの長さがランダムにセットされます。
- リンク機構として物理的に成り立たない長さの場合、計算が破綻します。そのとき、画面がピンクになります。
- 画面真ん中右の文字は、先端Dの位置の分析です。
- x軸方向の最小値、最大値、その変化量(=歩幅)
- y軸方向の最小値、最大値、その変化量(=足を上げる高さ)
- y/xの変化量の比率