プログラムについて
・予め用意されている変数ではプログラムが見づらくなるので symbol を使用して名前を変えています。
・ポート名、固定値も、symbolで定義してみました。
・2つの信号機を別々に制御するため、ステートマシンを使いました。
・時間管理は、EtimeA = time のように最初のシステム時刻し、以降は calA = time - EtimeA で現在のシステム時刻から、保存しておいたシステム時刻を減算し、if calA >= STPTIM then でタイムアップしたかをチェックしています。
・システム時間は time で取得できますが、16bitの為、連続稼働で18日とちょっと過ぎた時にオーバーフローします。
事前にオーバーフローを検出して2つのステートマシーンが進行IDLE時にtimeを初期化するようにしてみました。
・if 内で演算できませんでしたので
if time - EtimeA >= STPTIM then
途中演算用の変数 calA を用意して回避しました。
calA = time - EtimeA
if calA >= STPTIM then
・debug を 有効にするとプログラムがかなり遅くなるので、タイムアウト時間を短くして動作確認しました。
・複数の時間制御を行うときは、pause を使わない方法でプログラムを作るとよいです。
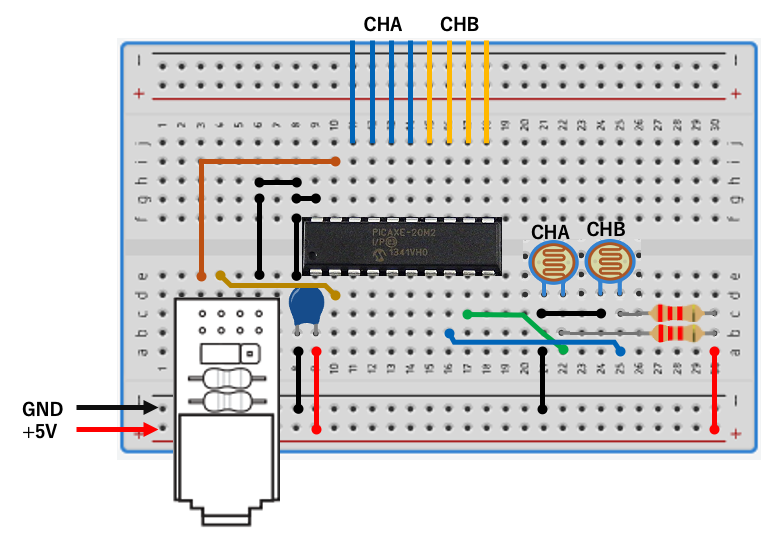
組み立て
実際は、Cdsセンサ、LEDは別基板にて接続しています。
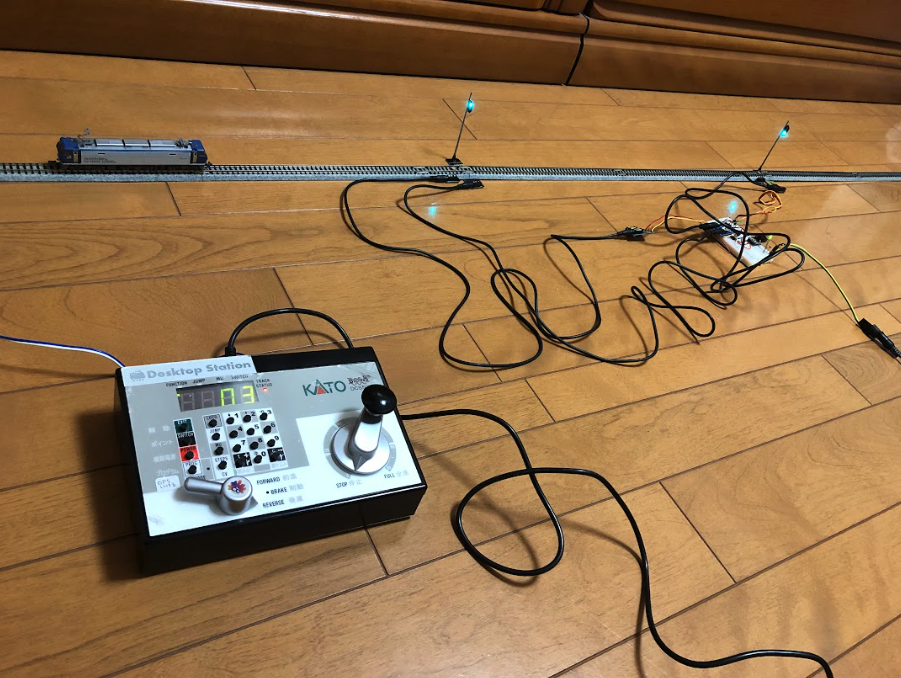
動画
写真
PICAXE-20Mとブレッドボード
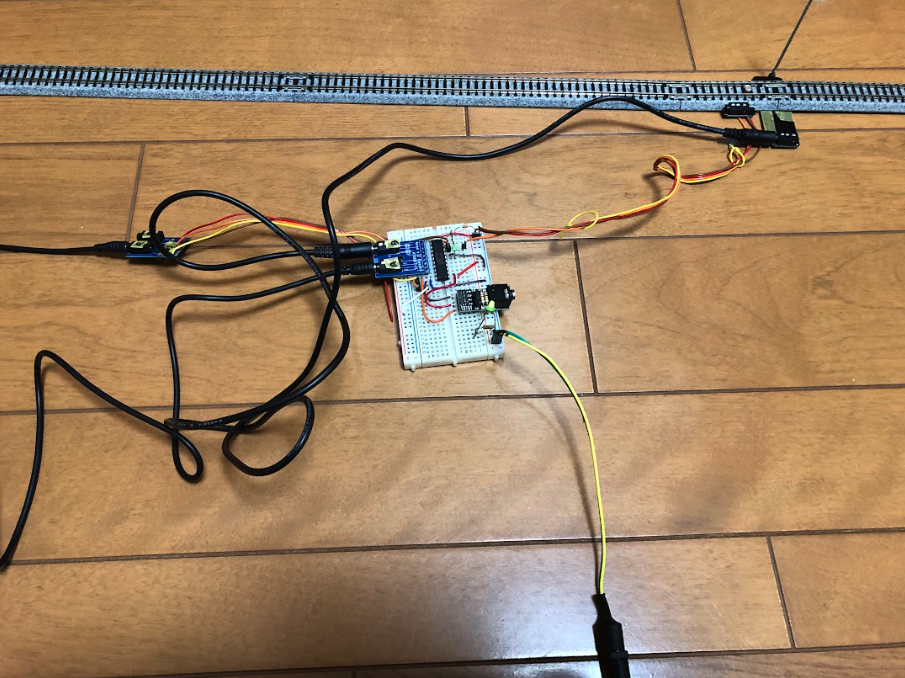
動作確認用全体写真
関連投稿
ソースファイル
;---------------------------------------------------------------------------
; 閉塞信号機 2回路
; [閉塞信号機2.bas]
; Copyright (c) 2024 Ayanosuke(Maison de DCC)
;
; http://maison-dcc.sblo.jp/ http://dcc.client.jp/ http://ayabu.blog.shinobi.jp/
; https://twitter.com/masashi_214
;
; DCC電子工作連合のメンバーです
; https://desktopstation.net/tmi/ https://desktopstation.net/bb/index.php
;
; This software is released under the MIT License.
; http://opensource.org/licenses/mit-license.php
;---------------------------------------------------------------------------
symbol STATE_A = b0 ;w0
symbol STATE_B = b1 ;w0
symbol CH1ADCVAL = b2 ;w1
symbol CH2ADCVAL = b3 ;w1
symbol EtimeA = w2
symbol EtimeB = w3
symbol calA = w4
symbol calB = w5
symbol CH1ADCPORT = c.1
symbol CH2ADCPORT = c.2
symbol ADCHth = 200 ;Hth未使用
symbol ADCLth = 60 ;60=曇りで照明を付けていないリビング
symbol STPTIM = 10 ;停止 10秒
symbol CAUTIM = 5 ;注意 5秒
symbol DECTIM = 5 ;減速 5秒
;symbol STPTIM = 2 ;停止 10秒 debugモード用
;symbol CAUTIM = 1 ;注意 5秒 debugモード用
;symbol DECTIM = 1 ;減速 5秒 debugモード用
symbol ST_INIT = 0
symbol ST_ADVANCE = 1
symbol ST_ADVIDLE = 2
symbol ST_CAUTION = 3
symbol ST_CAUIDLE = 4
symbol ST_STOP = 5
symbol ST_STPIDLE = 6
symbol ST_DECELE = 7
symbol ST_DECIDLE = 8
adcconfig %000 ; b2 = 0 VRef- is 0V , b1-0 = 00 VRef+ is V+ (power supply)
setfreq m16 ; m16でtimeが秒になる
let STATE_A = ST_INIT ; STATE変数に、初期値ST_INITを代入
main:
;---------- CHA ----------
select case STATE_A ; ステートマシーン
case ST_INIT ; STATE:初期
STATE_A = ST_ADVANCE
case ST_ADVANCE ; STATE:進行状態
gosub advanceA
STATE_A = ST_ADVIDLE
case ST_ADVIDLE ;進行状態で在線検出を確認
gosub detection_chk
if CH1ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_A = ST_STOP
endif
case ST_STOP ;STATE:停止状態
gosub stopA
EtimeA = time
STATE_A = ST_STPIDLE
case ST_STPIDLE ;停止状態で在線検出
gosub detection_chk
if CH1ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_A = ST_STOP
endif
calA = time - EtimeA
if calA >= STPTIM then ;タイムアップしたら ST_CAUTIONへ
STATE_A = ST_CAUTION
endif
case ST_CAUTION ;STATE:注意状態
gosub cautionA
EtimeA = time ;タイマーリセット
STATE_A = ST_CAUIDLE
case ST_CAUIDLE ;注意状態で在線検出を確認
gosub detection_chk
if CH1ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_A = ST_STOP
endif
calA = time - EtimeA
if calA >= CAUTIM then ;タイムアップしたらST_ADVNCEへ
STATE_A = ST_ADVANCE
endif
endselect
;---------- CHB ----------
select case STATE_B ; ステートマシーン
case ST_INIT ; STATE:初期
STATE_B = ST_ADVANCE
case ST_ADVANCE ; STATE:進行状態
gosub advanceB
STATE_B = ST_ADVIDLE
case ST_ADVIDLE ;進行状態で在線検出を確認
gosub detection_chk
if CH2ADCVAL < ADCLth then ;在線検知したら ST_STOPへ
STATE_B = ST_STOP
endif
case ST_STOP ;STATE:停止状態
gosub stopB
EtimeB = time ;現在値のタイマー読み込み
STATE_B = ST_STPIDLE
case ST_STPIDLE ;停止状態で在線検出
gosub detection_chk
if CH2ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_B = ST_STOP
endif
calB = time - EtimeB
if calB >= STPTIM then ;タイムアップしたら ST_CAUTIONへ
STATE_B = ST_CAUTION
endif
case ST_CAUTION ;STATE:注意状態
gosub cautionB
EtimeB = time ;タイマーセット
STATE_B = ST_CAUIDLE
case ST_CAUIDLE ;注意状態で在線検出を確認
gosub detection_chk
if CH2ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_B = ST_STOP
endif
calB = time - EtimeB
if calB >= DECTIM then ;タイムアップしたらST_DECELEへ
STATE_B = ST_DECELE
endif
case ST_DECELE ;STATE:減速
gosub decelerationB
EtimeB = time ;タイマーセット
STATE_B = ST_DECIDLE
case ST_DECIDLE ;減速状態で在線検出を確認
gosub detection_chk
if CH2ADCVAL =< ADCLth then ;在線検知したら ST_STOPへ
STATE_B = ST_STOP
endif
calB = time - EtimeB
if calB >= CAUTIM then ;タイムアップしたらST_ADVNCEへ
STATE_B = ST_ADVANCE
endif
endselect
gosub timechk ;timeのオーバーフローチェック
; debug ;有効にするとかなり遅くなる
goto main
;------------------------------------------------------------
;3現示信号機
;------------------------------
;消灯
;------------------------------
ledoffA:
low b.0
low b.1
low b.2
low b.3
return
;------------------------------
;進行
;------------------------------
advanceA:
low b.0
high b.1
low b.2
low b.3
return
;------------------------------
;注意
;------------------------------
cautionA:
high b.0
low b.1
low b.2
high b.3
return
;------------------------------
;停止
;------------------------------
stopA:
high b.0
high b.1
high b.2
low b.3
return
;------------------------------------------------------------
;4現示信号機
;------------------------------
;消灯
;------------------------------
ledoffB:
low b.4
low b.5
low b.6
low b.7
return
;------------------------------
;進行
;------------------------------
advanceB:
low b.4
high b.5
low b.6
low b.7
return
;------------------------------
;注意
;------------------------------
cautionB:
high b.4
high b.5
low b.6
high b.7
return
;------------------------------
;減速
;------------------------------
decelerationB:
low b.4
high b.5
low b.6
high b.7
return
;------------------------------
;停止
;------------------------------
stopB:
high b.4
high b.5
high b.6
low b.7
return
;------------------------------
;ADC取り込み
;------------------------------
detection_chk:
readadc CH1ADCPORT,CH1ADCVAL
readadc CH2ADCPORT,CH2ADCVAL
return
;------------------------------
;time のオーバーフローを確認
;------------------------------
timechk:
if time >= 64800 then ; 18日以上 60 x 60 x 18 = 64800
if STATE_A = ST_ADVIDLE and STATE_B = ST_ADVIDLE then
time = 0
endif
endif
return
PICAXE関連の投稿
PICAXE(ピカクス)でLチカ
https://qiita.com/masashi_214/items/5495503bf6bd82c1980b
PICAXE 最初に調べた事
https://qiita.com/masashi_214/items/d1acb1ecdc32de5a1698
PICAXEで鉄道模型の在線検出と信号機の制御
https://qiita.com/masashi_214/items/c728814df4f7a2453112
PICAXE(ピカクス)のポート設定
https://qiita.com/masashi_214/items/e5d5e1b9817aed754f52
PICAXE(ピカクス) リンク集
https://qiita.com/masashi_214/items/8b630b2c60ddb466b1ac
PICAXE(ピカクス)のpwm設定
https://qiita.com/masashi_214/items/f92e52837a9fa902879f
PICAXEでPWMを使用した調光機能を使って蛍を作る
https://qiita.com/masashi_214/items/0231a75ae0c77c2be206