※この文章や内容は組み込み初心者、情報技術系雑魚が書いてるものですゆえ
過度な期待はせずに温かい目で見守ってください
初心者ROS奮闘記(になる予定)
第1弾
iCreateでgmappingしてみよ。
ということでいろいろ試行錯誤していきながらわかったことわからなかったことをメモ的に・・・
まずは使うもの
・ROS(indigo)
・iCreate(たぶん500シリーズ・・・)
・測域センサ(hokuyo URG-04LX-UG01) 高いらしい・・・9万とか・・・ヒエッ
んで、とりあえずクリエイトを動かす。
roomba500のドライバをもらってくる
(http://arkapravo.github.io/roomba_500_ROS_drivers/)
で自分のcatki_wsに展開してrosmake
ドライバが入った。
動かすのは参考にさせてもらった
(http://cyberworks.cocolog-nifty.com/blog/2013/04/roombapython-bb.html)
端末で
$ sudo chmod a+rw /dev/ttyUSB0
クリエイトのパワーいれて
$ rosrun roomba_500_series roomba500_light_node
パワー入れるのが先かもしんない。
次にセンサのドライバ wikiみたほうがはやい。
(http://wiki.ros.org/hokuyo_node/Tutorials/UsingTheHokuyoNode)
$ sudo apt-get install ros-indigo-hokuyo-node
公式wikiではこう
$ sudo apt-get install ros-indigo-urg-node
でも大丈夫らしい。
で、
$ sudo chmod a+rw /dev/ttyACM0
入れて
$ rosrun hokuyo_node hokuyo_node
で動く。
$ rqt_graph
で確認すると
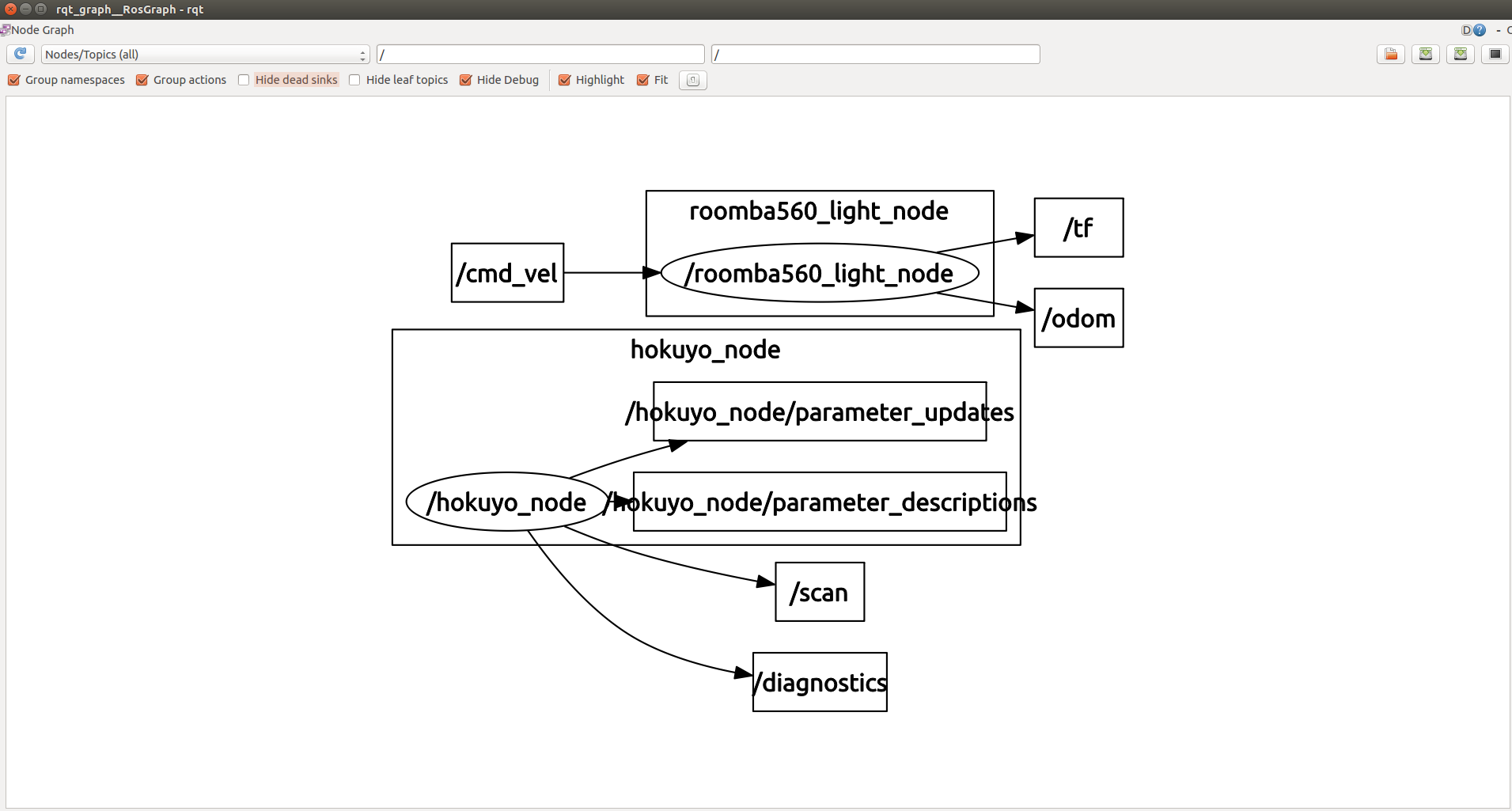
ちゃんとトピックが出せてる(と思ってた)
キーボードでクリエイトを動かしたいなら
(http://wiki.ros.org/teleop_twist_keyboard)
$ sudo apt-get install ros-indigo-teleop-twist-keyboard
でいれてきて
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
で動いた
ここまでできたので
動かしてgmappingいけるやろ!
Vやねん!
gmapping「[ WARN] [1446122137.391726224]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
」
わい「ホゲッ・・・(ちーん)」
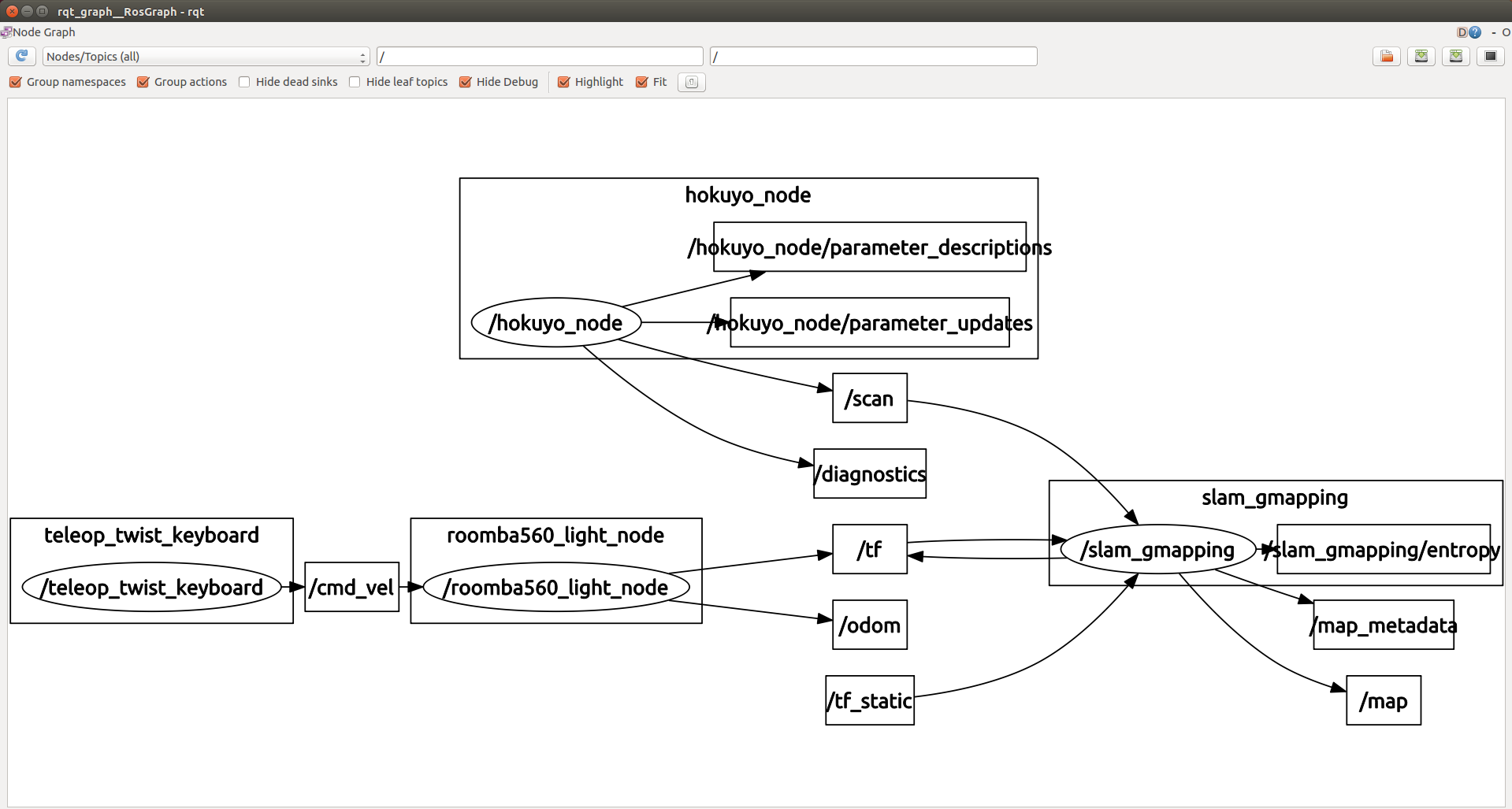
なんかオドメトリがうまくgmappingに入ってないみたい
追記:gmappingはそもそも/tfと/scanしかとらないみたいです
warnはタイムスタンプがどうのこうので怒られてるよう
というわけでまた次
(アドバイスとかくれると嬉しいです)