この記事は何?
SpresenseのCAN AddOnボードを購入しました。
CAN通信が送信・受信が確認できました。確認手順を共有します。
確認環境
ホストPC
- macOS Ventura 13.2.1
ハードウェア
ソフトウェア
- Arduino IDE 2.0.4
- Spresense Arduino 2.6.0
- MCP_CAN Library for Arduino ※2023/3/20時点の最新コミット
動作確認手順
動作確認は基本、こちらの参考記事とおりにおこなっていきました。該当記事から時間が経っているため、MCP_CAN Library for Arduinoが更新されていました。この記事では参考記事と若干違う手順になっています。
MCP_CAN Library for Arduinoのインストール
CAN AddOnボードのCANコントローラはMCP2515です。このコントローラを制御するライブラリがMCP_CAN Library for Arduinoです。このライブラリをGitHubからダウンロードします。
私は動作確認時の最新コミットをzip形式でダウンロードし、Arduino IDEのメニューからインストールしました。
コードの変更
スケッチ例の中の MCP_CAN_lib-master -> CAN_loopbackを選択します。こちらのCAN_loopback.inoをベースにして確認を進めていきます。
ピン配置
つぎのピン配置に変更しました。
// CAN0 INT and CS
-#define CAN0_INT 2 // Set INT to pin 2
-MCP_CAN CAN0(10); // Set CS to pin 10
#define CAN0_INT 20 // Set INT to pin D20
MCP_CAN CAN0(19); // Set CS to pin D19
MCP2515周波数設定
CAN AddOnボードの周波数は8MHzのため周波数設定を変更しました。
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
- if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_16MHZ) == CAN_OK)
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
MCP_CAN Library for Arduino
SpresenseとCAN AddOnボードはSPI5で接続しています。SpresenseはSPI5でMCP2515を制御する必要があるためmcp_can.cppを修正します。
MCP_CAN::MCP_CAN(INT8U _CS)
{
MCPCS = _CS;
MCP2515_UNSELECT();
pinMode(MCPCS, OUTPUT);
- mcpSPI = &SPI;
mcpSPI = &SPI5;
}
私の環境の場合、mcp_can.cppはつぎのディレクトリに格納されていました。
- /Users/ユーザー名/Documents/Arduino/libraries/mcp_can/mcp_can.cpp
参考記事にも書いてある通りSpresense以外のArduinoでMCP_CAN Library for Arduinoを使いたい場合は、元のコードに戻す必要があるのでご注意ください。
ジャンパー設定
INTピン
CAN AddOnボードではMCP2515のINTピンの接続をジャンパーで設定可能です。
今回は参考記事のとおりJP1の1-2間をはんだショートします。
これでSpresenseのD20ピンとMCP2515のINTピンが接続されます。
CSピン
CAN AddOnボードではMCP2515のCSピンの接続をジャンパーで設定可能です。
今回は参考記事のとおりJP2の1-2間をはんだショートします。
これでSpresenseのD19ピンとMCP2515のCSピンが接続されます。
終端抵抗
CAN AddOnボードのJP3をショートすることで120オームの終端抵抗を接続できます。今回はJP3はオープンのまま、終端抵抗なしの設定とします。
コンパイル・書き込み
Arduino IDEでコンパイル・書き込みをおこないます。
動作確認
ループバックモード
ループバックの動作を確認してみます。
SpresenseメインボードのUSB miniBコネクタにUSBケーブルを接続し電源供給すると動作が開始されます。
Arduino IDEのシリアルモニタを立ち上げると下図が表示されていました。
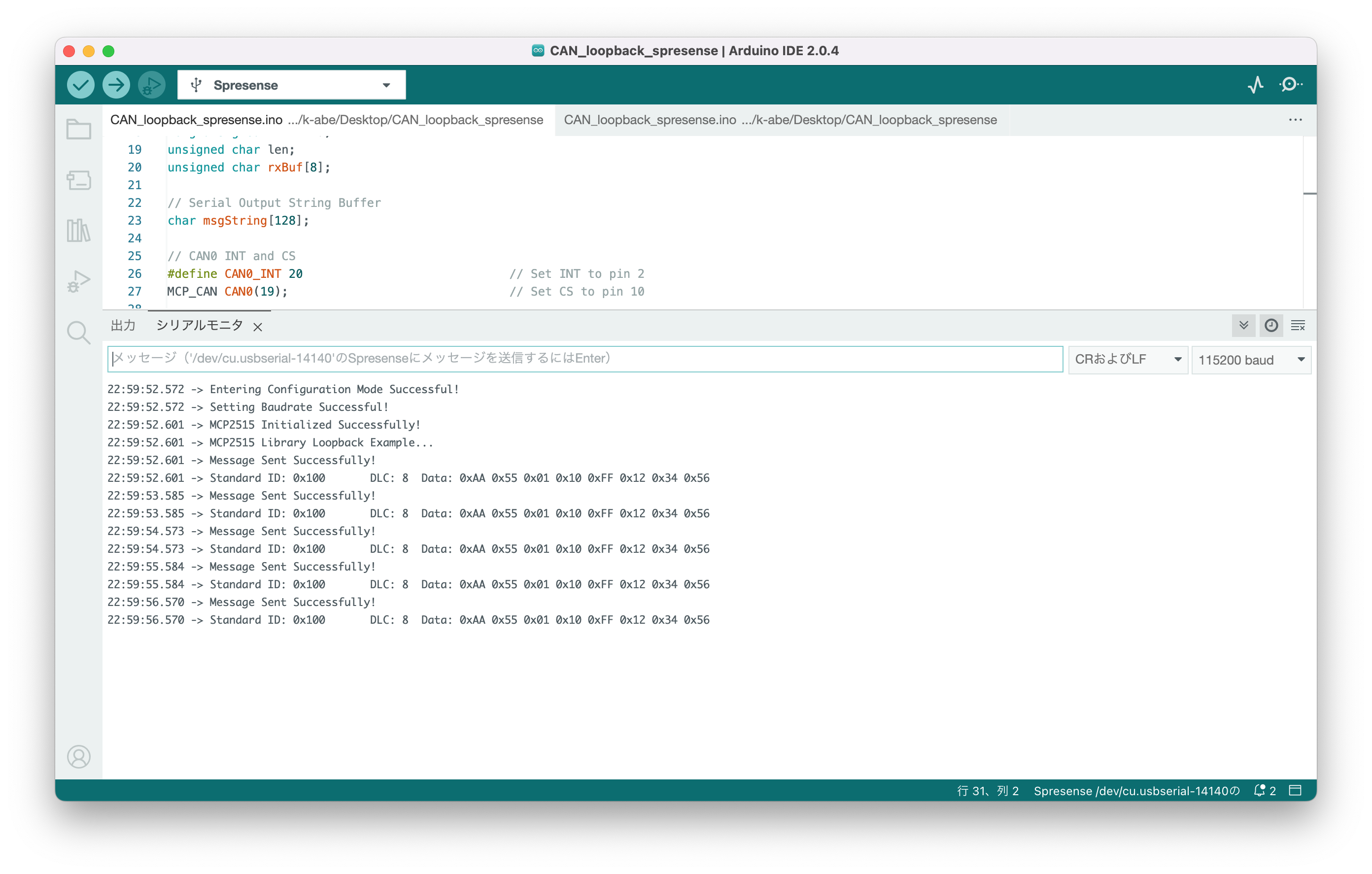
送信成功のつぎのメッセージが表示されています。
Message Sent Successfully!
ループバックモードなので送信データを受信します。受信するとCAN ID, データ長、受信データを表示します。つぎのメッセージが表示されているので受信できていると判断しました。
Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
ノーマルモード
つぎはノーマルモードにしてCANバスに接続されている他のデバイスと通信できるか確認します。
コード変更
ノーマルモードにするにはつぎのコードを変更します。
void setup()
{
Serial.begin(115200); // CAN is running at 500,000BPS; 115,200BPS is SLOW, not FAST, thus 9600 is crippling.
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
// Since we do not set NORMAL mode, we are in loopback mode by default.
- //CAN0.setMode(MCP_NORMAL);
CAN0.setMode(MCP_NORMAL);
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Loopback Example...");
}
コード変更が終わったらコンパイル、書き込みをします。
配線
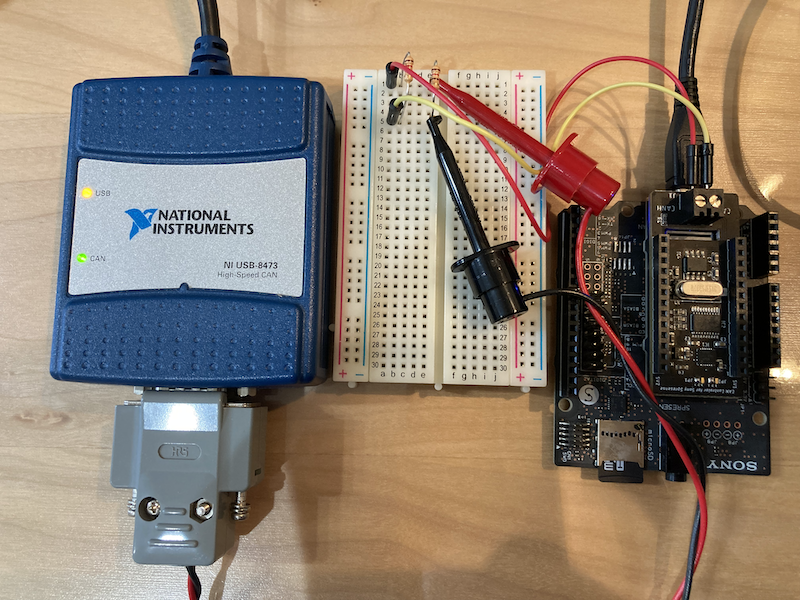
CANバスにCAN AddOnボード、通信相手のデバイスを接続します。
今回は自宅にあったNI-CAN(NI USB-8473)を接続しました。
CAN AddOnボード、NI-CANは終端していないので下図のようにブレッドボード上に120Ωの終端抵抗を挿し接続しました。
通信相手の設定
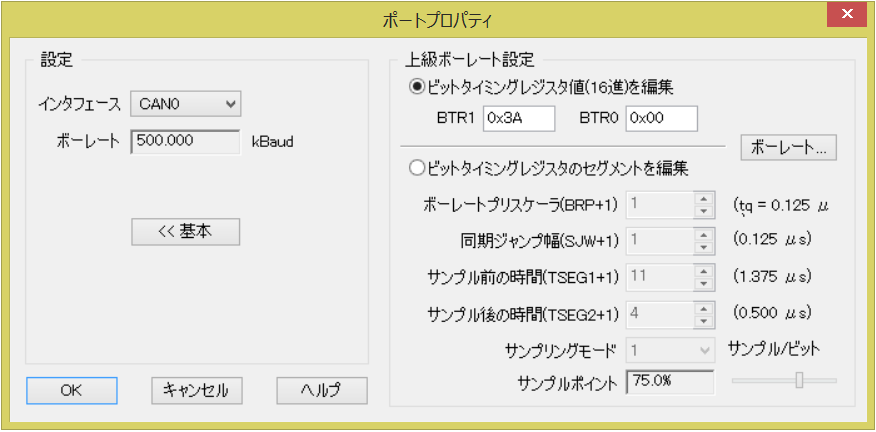
通信相手のボーレート、ビットタイミングを確認、調整します。
対象にしたソースコードののボーレート設定(CAN_500KBPS, MCP_8MHZ)を追うとサンプルポイントは75%になっていることがわかりました。
よって、通信相手のボーレート、ビットタイミングも同様に設定します。
下図が通信相手(NI-CAN)のボーレート、ビットタイミングの設定画面です。
動作確認結果
接続ができたらCAN AddOnボード、NI-CANに電源を供給します。
CAN AddOnボードの送信確認
CAN AddOnボードの送信を確認します。
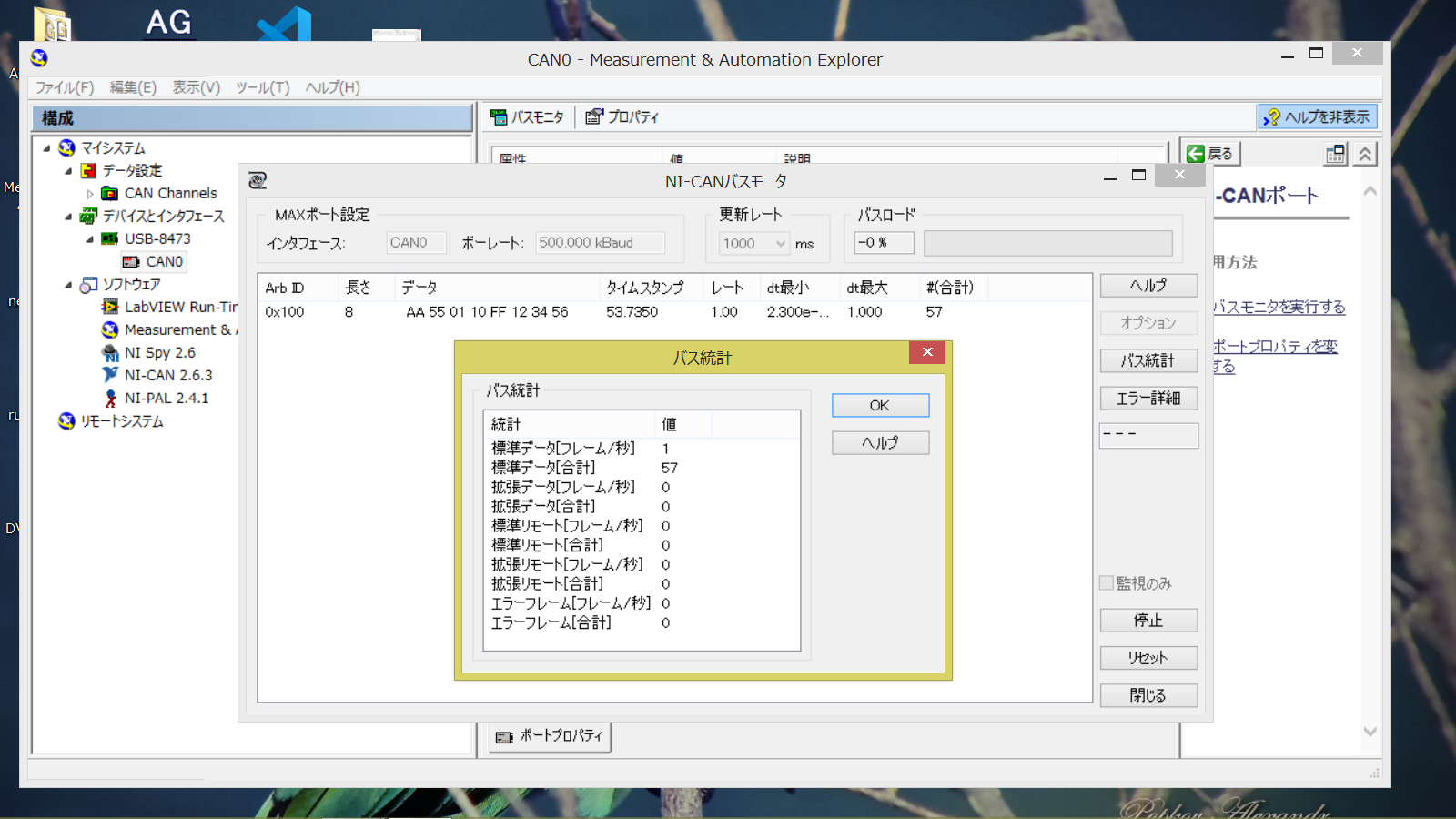
NI-CANは受信データを確認できるバスモニタ機能があるのでこちらで確認します。
バスモニタを起動すると下図のようにCAN AddOnボードの送信データが確認できました。
バスモニタのタイムスタンプも1秒毎に更新されていたのでCAN AddOnボードの送信間隔も問題なさそうです。
CAN AddOnボードの受信
NI-CANではCAN送信する方法がわかりませんでした。
別なデバイスとCAN AddOnボードを接続し、別なデバイスからCAN送信をおこなったところ、CAN ID, データ長、受信データを示すシリアルメッセージが表示されていたので受信も問題なさそうです。
まとめ
SpresenseとCAN AddONボードでループバックモード、ノーマルモードでCAN通信が確認できました。
SpresenseメインボードとCAN AddONボードを接続しても未使用IOポートがあるのでセンサなどを接続し、意味のあるメッセージをセットしてCANデータ送信を確かめてみたいと考えています。
読んでいただきありがとうございました。