Sony Spresense用のCANインターフェースボードを作ってみました。
このボードに使用しているCANインタフェースICはMicrochip社のMCP2515T-E_STです。
MCP2515は、第2世代のスタンドアロンCANコントローラです。MCP2510とピンおよび機能の互換性があり、より高速なスループット、データバイト・フィルタリング、タイムトリガー・プロトコルのサポートなどのアップグレードされた機能が含まれています。
詳しくは以下のデータシートをご覧下さい。
MCP2515 データシート
回路図とEagle用のデータはGithubにて公開しています。
kaz19610303/SPRESENSE_CAN
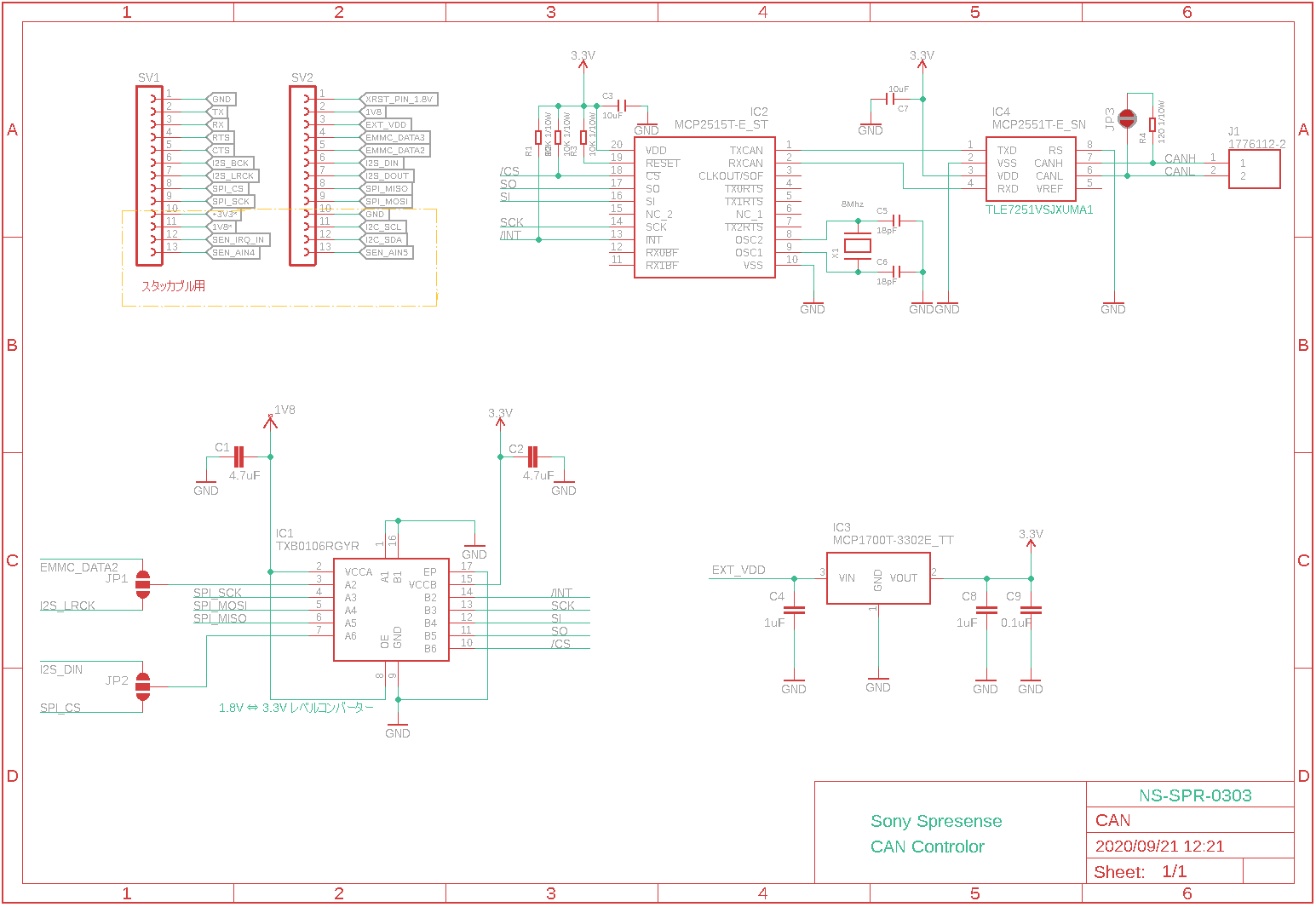
ジャンパー設定
SJ1 INTピン選択 1: EMMC_DATA2 3:I2S_LRCK
SJ2 csピン選択 1: I2S_DIN 3:SPI_CS
SJ3 ショートで終端抵抗有効
回路図
テストプログラム
CANを使用するためにArduino用に公開されているcoryjfowler/MCP_CAN_libをArduino IDEにインストールします。
ジャンパーの設定
SJ1 1-2ショート
SJ2 1-2ショート
SJ3 ショート
coryjfowler/MCP_CAN_libをインストールして
スケッチ例の中の MCP_CAN_lib-master -> CAN_loopback でテストを行います。
CAN_loopback.ino の
26行目の 2 を 20
27行目の 10 を 19 に変更します
// CAN0 INT and CS
# define CAN0_INT 20 // Set INT to pin 2 -> 20
MCP_CAN CAN0(19); // Set CS to pin 10 -> 19
ただしこの変更だけでは動きませんでした。
SpresenseのSPIを使用する時は注意が必要です。
詳しくは以下のドキュメントを見てもらうと分かると思いますが、メインボードのSPIのインスタンスは
SPI5となります。
2. Spresense Arduino ライブラリ 2.18. SPI ライブラリ
したがって、CANライブラリのmcp_can.cppを変更する必要があります。
SPI.****** の部分を SPI5.****** に書き直します。
ただ、この変更を行うと Spresense以外のボードで MCP_CAN_lib を使うときにエラーとなりますので
その場合は SPI.****** に戻して下さい。
以下に変更したソースコードを掲載します。
/* CAN Loopback Example
* This example sends a message once a second and receives that message
* no CAN bus is required. This example will test the functionality
* of the protocol controller, and connections to it.
*
* Written By: Cory J. Fowler - October 5th 2016
*/
# include "mcp_can.h"
# include <SPI.h>
// CAN TX Variables
unsigned long prevTX = 0; // Variable to store last execution time
const unsigned int invlTX = 1000; // One second interval constant
byte data[] = {0xAA, 0x55, 0x01, 0x10, 0xFF, 0x12, 0x34, 0x56}; // Generic CAN data to send
// CAN RX Variables
long unsigned int rxId;
unsigned char len;
unsigned char rxBuf[8];
// Serial Output String Buffer
char msgString[128];
// CAN0 INT and CS
# define CAN0_INT 20 // Set INT to pin 2 -> 20
MCP_CAN CAN0(19); // Set CS to pin 10 -> 19
void setup()
{
Serial.begin(115200); // CAN is running at 500,000BPS; 115,200BPS is SLOW, not FAST, thus 9600 is crippling.
// Initialize MCP2515 running at 16MHz with a baudrate of 500kb/s and the masks and filters disabled.
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_16MHZ) == CAN_OK)
Serial.println("MCP2515 Initialized Successfully!");
else
Serial.println("Error Initializing MCP2515...");
// Since we do not set NORMAL mode, we are in loopback mode by default.
//CAN0.setMode(MCP_NORMAL);
pinMode(CAN0_INT, INPUT); // Configuring pin for /INT input
Serial.println("MCP2515 Library Loopback Example...");
}
void loop()
{
if(!digitalRead(CAN0_INT)) // If CAN0_INT pin is low, read receive buffer
{
CAN0.readMsgBuf(&rxId, &len, rxBuf); // Read data: len = data length, buf = data byte(s)
if((rxId & 0x80000000) == 0x80000000) // Determine if ID is standard (11 bits) or extended (29 bits)
sprintf(msgString, "Extended ID: 0x%.8lX DLC: %1d Data:", (rxId & 0x1FFFFFFF), len);
else
sprintf(msgString, "Standard ID: 0x%.3lX DLC: %1d Data:", rxId, len);
Serial.print(msgString);
if((rxId & 0x40000000) == 0x40000000){ // Determine if message is a remote request frame.
sprintf(msgString, " REMOTE REQUEST FRAME");
Serial.print(msgString);
} else {
for(byte i = 0; i<len; i++){
sprintf(msgString, " 0x%.2X", rxBuf[i]);
Serial.print(msgString);
}
}
Serial.println();
}
if(millis() - prevTX >= invlTX){ // Send this at a one second interval.
prevTX = millis();
byte sndStat = CAN0.sendMsgBuf(0x100, 8, data);
if(sndStat == CAN_OK)
Serial.println("Message Sent Successfully!");
else
Serial.println("Error Sending Message...");
}
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
/*
mcp_can.cpp
2012 Copyright (c) Seeed Technology Inc. All right reserved.
2017 Copyright (c) Cory J. Fowler All Rights Reserved.
Author: Loovee
Contributor: Cory J. Fowler
2017-09-25
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-
1301 USA
*/
# include "mcp_can.h"
# define spi_readwrite SPI5.transfer
# define spi_read() spi_readwrite(0x00)
/*********************************************************************************************************
** Function name: mcp2515_reset
** Descriptions: Performs a software reset
*********************************************************************************************************/
void MCP_CAN::mcp2515_reset(void)
{
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_RESET);
MCP2515_UNSELECT();
SPI5.endTransaction();
delayMicroseconds(10);
}
/*********************************************************************************************************
** Function name: mcp2515_readRegister
** Descriptions: Read data register
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_readRegister(const INT8U address)
{
INT8U ret;
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_READ);
spi_readwrite(address);
ret = spi_read();
MCP2515_UNSELECT();
SPI5.endTransaction();
return ret;
}
/*********************************************************************************************************
** Function name: mcp2515_readRegisterS
** Descriptions: Reads sucessive data registers
*********************************************************************************************************/
void MCP_CAN::mcp2515_readRegisterS(const INT8U address, INT8U values[], const INT8U n)
{
INT8U i;
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_READ);
spi_readwrite(address);
// mcp2515 has auto-increment of address-pointer
for (i=0; i<n; i++)
values[i] = spi_read();
MCP2515_UNSELECT();
SPI5.endTransaction();
}
/*********************************************************************************************************
** Function name: mcp2515_setRegister
** Descriptions: Sets data register
*********************************************************************************************************/
void MCP_CAN::mcp2515_setRegister(const INT8U address, const INT8U value)
{
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_WRITE);
spi_readwrite(address);
spi_readwrite(value);
MCP2515_UNSELECT();
SPI5.endTransaction();
}
/*********************************************************************************************************
** Function name: mcp2515_setRegisterS
** Descriptions: Sets sucessive data registers
*********************************************************************************************************/
void MCP_CAN::mcp2515_setRegisterS(const INT8U address, const INT8U values[], const INT8U n)
{
INT8U i;
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_WRITE);
spi_readwrite(address);
for (i=0; i<n; i++)
spi_readwrite(values[i]);
MCP2515_UNSELECT();
SPI5.endTransaction();
}
/*********************************************************************************************************
** Function name: mcp2515_modifyRegister
** Descriptions: Sets specific bits of a register
*********************************************************************************************************/
void MCP_CAN::mcp2515_modifyRegister(const INT8U address, const INT8U mask, const INT8U data)
{
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_BITMOD);
spi_readwrite(address);
spi_readwrite(mask);
spi_readwrite(data);
MCP2515_UNSELECT();
SPI5.endTransaction();
}
/*********************************************************************************************************
** Function name: mcp2515_readStatus
** Descriptions: Reads status register
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_readStatus(void)
{
INT8U i;
SPI5.beginTransaction(SPISettings(10000000, MSBFIRST, SPI_MODE0));
MCP2515_SELECT();
spi_readwrite(MCP_READ_STATUS);
i = spi_read();
MCP2515_UNSELECT();
SPI5.endTransaction();
return i;
}
/*********************************************************************************************************
** Function name: setMode
** Descriptions: Sets control mode
*********************************************************************************************************/
INT8U MCP_CAN::setMode(const INT8U opMode)
{
mcpMode = opMode;
return mcp2515_setCANCTRL_Mode(mcpMode);
}
/*********************************************************************************************************
** Function name: mcp2515_setCANCTRL_Mode
** Descriptions: Set control mode
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_setCANCTRL_Mode(const INT8U newmode)
{
INT8U i;
mcp2515_modifyRegister(MCP_CANCTRL, MODE_MASK, newmode);
i = mcp2515_readRegister(MCP_CANCTRL);
i &= MODE_MASK;
if ( i == newmode )
return MCP2515_OK;
return MCP2515_FAIL;
}
/*********************************************************************************************************
** Function name: mcp2515_configRate
** Descriptions: Set baudrate
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_configRate(const INT8U canSpeed, const INT8U canClock)
{
INT8U set, cfg1, cfg2, cfg3;
set = 1;
switch (canClock)
{
case (MCP_8MHZ):
switch (canSpeed)
{
case (CAN_5KBPS): // 5KBPS
cfg1 = MCP_8MHz_5kBPS_CFG1;
cfg2 = MCP_8MHz_5kBPS_CFG2;
cfg3 = MCP_8MHz_5kBPS_CFG3;
break;
case (CAN_10KBPS): // 10KBPS
cfg1 = MCP_8MHz_10kBPS_CFG1;
cfg2 = MCP_8MHz_10kBPS_CFG2;
cfg3 = MCP_8MHz_10kBPS_CFG3;
break;
case (CAN_20KBPS): // 20KBPS
cfg1 = MCP_8MHz_20kBPS_CFG1;
cfg2 = MCP_8MHz_20kBPS_CFG2;
cfg3 = MCP_8MHz_20kBPS_CFG3;
break;
case (CAN_31K25BPS): // 31.25KBPS
cfg1 = MCP_8MHz_31k25BPS_CFG1;
cfg2 = MCP_8MHz_31k25BPS_CFG2;
cfg3 = MCP_8MHz_31k25BPS_CFG3;
break;
case (CAN_33K3BPS): // 33.33KBPS
cfg1 = MCP_8MHz_33k3BPS_CFG1;
cfg2 = MCP_8MHz_33k3BPS_CFG2;
cfg3 = MCP_8MHz_33k3BPS_CFG3;
break;
case (CAN_40KBPS): // 40Kbps
cfg1 = MCP_8MHz_40kBPS_CFG1;
cfg2 = MCP_8MHz_40kBPS_CFG2;
cfg3 = MCP_8MHz_40kBPS_CFG3;
break;
case (CAN_50KBPS): // 50Kbps
cfg1 = MCP_8MHz_50kBPS_CFG1;
cfg2 = MCP_8MHz_50kBPS_CFG2;
cfg3 = MCP_8MHz_50kBPS_CFG3;
break;
case (CAN_80KBPS): // 80Kbps
cfg1 = MCP_8MHz_80kBPS_CFG1;
cfg2 = MCP_8MHz_80kBPS_CFG2;
cfg3 = MCP_8MHz_80kBPS_CFG3;
break;
case (CAN_100KBPS): // 100Kbps
cfg1 = MCP_8MHz_100kBPS_CFG1;
cfg2 = MCP_8MHz_100kBPS_CFG2;
cfg3 = MCP_8MHz_100kBPS_CFG3;
break;
case (CAN_125KBPS): // 125Kbps
cfg1 = MCP_8MHz_125kBPS_CFG1;
cfg2 = MCP_8MHz_125kBPS_CFG2;
cfg3 = MCP_8MHz_125kBPS_CFG3;
break;
case (CAN_200KBPS): // 200Kbps
cfg1 = MCP_8MHz_200kBPS_CFG1;
cfg2 = MCP_8MHz_200kBPS_CFG2;
cfg3 = MCP_8MHz_200kBPS_CFG3;
break;
case (CAN_250KBPS): // 250Kbps
cfg1 = MCP_8MHz_250kBPS_CFG1;
cfg2 = MCP_8MHz_250kBPS_CFG2;
cfg3 = MCP_8MHz_250kBPS_CFG3;
break;
case (CAN_500KBPS): // 500Kbps
cfg1 = MCP_8MHz_500kBPS_CFG1;
cfg2 = MCP_8MHz_500kBPS_CFG2;
cfg3 = MCP_8MHz_500kBPS_CFG3;
break;
case (CAN_1000KBPS): // 1Mbps
cfg1 = MCP_8MHz_1000kBPS_CFG1;
cfg2 = MCP_8MHz_1000kBPS_CFG2;
cfg3 = MCP_8MHz_1000kBPS_CFG3;
break;
default:
set = 0;
return MCP2515_FAIL;
break;
}
break;
case (MCP_16MHZ):
switch (canSpeed)
{
case (CAN_5KBPS): // 5Kbps
cfg1 = MCP_16MHz_5kBPS_CFG1;
cfg2 = MCP_16MHz_5kBPS_CFG2;
cfg3 = MCP_16MHz_5kBPS_CFG3;
break;
case (CAN_10KBPS): // 10Kbps
cfg1 = MCP_16MHz_10kBPS_CFG1;
cfg2 = MCP_16MHz_10kBPS_CFG2;
cfg3 = MCP_16MHz_10kBPS_CFG3;
break;
case (CAN_20KBPS): // 20Kbps
cfg1 = MCP_16MHz_20kBPS_CFG1;
cfg2 = MCP_16MHz_20kBPS_CFG2;
cfg3 = MCP_16MHz_20kBPS_CFG3;
break;
case (CAN_33K3BPS): // 20Kbps
cfg1 = MCP_16MHz_33k3BPS_CFG1;
cfg2 = MCP_16MHz_33k3BPS_CFG2;
cfg3 = MCP_16MHz_33k3BPS_CFG3;
break;
case (CAN_40KBPS): // 40Kbps
cfg1 = MCP_16MHz_40kBPS_CFG1;
cfg2 = MCP_16MHz_40kBPS_CFG2;
cfg3 = MCP_16MHz_40kBPS_CFG3;
break;
case (CAN_50KBPS): // 50Kbps
cfg2 = MCP_16MHz_50kBPS_CFG2;
cfg3 = MCP_16MHz_50kBPS_CFG3;
break;
case (CAN_80KBPS): // 80Kbps
cfg1 = MCP_16MHz_80kBPS_CFG1;
cfg2 = MCP_16MHz_80kBPS_CFG2;
cfg3 = MCP_16MHz_80kBPS_CFG3;
break;
case (CAN_100KBPS): // 100Kbps
cfg1 = MCP_16MHz_100kBPS_CFG1;
cfg2 = MCP_16MHz_100kBPS_CFG2;
cfg3 = MCP_16MHz_100kBPS_CFG3;
break;
case (CAN_125KBPS): // 125Kbps
cfg1 = MCP_16MHz_125kBPS_CFG1;
cfg2 = MCP_16MHz_125kBPS_CFG2;
cfg3 = MCP_16MHz_125kBPS_CFG3;
break;
case (CAN_200KBPS): // 200Kbps
cfg1 = MCP_16MHz_200kBPS_CFG1;
cfg2 = MCP_16MHz_200kBPS_CFG2;
cfg3 = MCP_16MHz_200kBPS_CFG3;
break;
case (CAN_250KBPS): // 250Kbps
cfg1 = MCP_16MHz_250kBPS_CFG1;
cfg2 = MCP_16MHz_250kBPS_CFG2;
cfg3 = MCP_16MHz_250kBPS_CFG3;
break;
case (CAN_500KBPS): // 500Kbps
cfg1 = MCP_16MHz_500kBPS_CFG1;
cfg2 = MCP_16MHz_500kBPS_CFG2;
cfg3 = MCP_16MHz_500kBPS_CFG3;
break;
case (CAN_1000KBPS): // 1Mbps
cfg1 = MCP_16MHz_1000kBPS_CFG1;
cfg2 = MCP_16MHz_1000kBPS_CFG2;
cfg3 = MCP_16MHz_1000kBPS_CFG3;
break;
default:
set = 0;
return MCP2515_FAIL;
break;
}
break;
case (MCP_20MHZ):
switch (canSpeed)
{
case (CAN_40KBPS): // 40Kbps
cfg1 = MCP_20MHz_40kBPS_CFG1;
cfg2 = MCP_20MHz_40kBPS_CFG2;
cfg3 = MCP_20MHz_40kBPS_CFG3;
break;
case (CAN_50KBPS): // 50Kbps
cfg1 = MCP_20MHz_50kBPS_CFG1;
cfg2 = MCP_20MHz_50kBPS_CFG2;
cfg3 = MCP_20MHz_50kBPS_CFG3;
break;
case (CAN_80KBPS): // 80Kbps
cfg1 = MCP_20MHz_80kBPS_CFG1;
cfg2 = MCP_20MHz_80kBPS_CFG2;
cfg3 = MCP_20MHz_80kBPS_CFG3;
break;
case (CAN_100KBPS): // 100Kbps
cfg1 = MCP_20MHz_100kBPS_CFG1;
cfg2 = MCP_20MHz_100kBPS_CFG2;
cfg3 = MCP_20MHz_100kBPS_CFG3;
break;
case (CAN_125KBPS): // 125Kbps
cfg1 = MCP_20MHz_125kBPS_CFG1;
cfg2 = MCP_20MHz_125kBPS_CFG2;
cfg3 = MCP_20MHz_125kBPS_CFG3;
break;
case (CAN_200KBPS): // 200Kbps
cfg1 = MCP_20MHz_200kBPS_CFG1;
cfg2 = MCP_20MHz_200kBPS_CFG2;
cfg3 = MCP_20MHz_200kBPS_CFG3;
break;
case (CAN_250KBPS): // 250Kbps
cfg1 = MCP_20MHz_250kBPS_CFG1;
cfg2 = MCP_20MHz_250kBPS_CFG2;
cfg3 = MCP_20MHz_250kBPS_CFG3;
break;
case (CAN_500KBPS): // 500Kbps
cfg1 = MCP_20MHz_500kBPS_CFG1;
cfg2 = MCP_20MHz_500kBPS_CFG2;
cfg3 = MCP_20MHz_500kBPS_CFG3;
break;
case (CAN_1000KBPS): // 1Mbps
cfg1 = MCP_20MHz_1000kBPS_CFG1;
cfg2 = MCP_20MHz_1000kBPS_CFG2;
cfg3 = MCP_20MHz_1000kBPS_CFG3;
break;
default:
set = 0;
return MCP2515_FAIL;
break;
}
break;
default:
set = 0;
return MCP2515_FAIL;
break;
}
if (set) {
mcp2515_setRegister(MCP_CNF1, cfg1);
mcp2515_setRegister(MCP_CNF2, cfg2);
mcp2515_setRegister(MCP_CNF3, cfg3);
return MCP2515_OK;
}
return MCP2515_FAIL;
}
/*********************************************************************************************************
** Function name: mcp2515_initCANBuffers
** Descriptions: Initialize Buffers, Masks, and Filters
*********************************************************************************************************/
void MCP_CAN::mcp2515_initCANBuffers(void)
{
INT8U i, a1, a2, a3;
INT8U std = 0;
INT8U ext = 1;
INT32U ulMask = 0x00, ulFilt = 0x00;
mcp2515_write_mf(MCP_RXM0SIDH, ext, ulMask); /*Set both masks to 0 */
mcp2515_write_mf(MCP_RXM1SIDH, ext, ulMask); /*Mask register ignores ext bit */
/* Set all filters to 0 */
mcp2515_write_mf(MCP_RXF0SIDH, ext, ulFilt); /* RXB0: extended */
mcp2515_write_mf(MCP_RXF1SIDH, std, ulFilt); /* RXB1: standard */
mcp2515_write_mf(MCP_RXF2SIDH, ext, ulFilt); /* RXB2: extended */
mcp2515_write_mf(MCP_RXF3SIDH, std, ulFilt); /* RXB3: standard */
mcp2515_write_mf(MCP_RXF4SIDH, ext, ulFilt);
mcp2515_write_mf(MCP_RXF5SIDH, std, ulFilt);
/* Clear, deactivate the three */
/* transmit buffers */
/* TXBnCTRL -> TXBnD7 */
a1 = MCP_TXB0CTRL;
a2 = MCP_TXB1CTRL;
a3 = MCP_TXB2CTRL;
for (i = 0; i < 14; i++) { /* in-buffer loop */
mcp2515_setRegister(a1, 0);
mcp2515_setRegister(a2, 0);
mcp2515_setRegister(a3, 0);
a1++;
a2++;
a3++;
}
mcp2515_setRegister(MCP_RXB0CTRL, 0);
mcp2515_setRegister(MCP_RXB1CTRL, 0);
}
/*********************************************************************************************************
** Function name: mcp2515_init
** Descriptions: Initialize the controller
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_init(const INT8U canIDMode, const INT8U canSpeed, const INT8U canClock)
{
INT8U res;
mcp2515_reset();
mcpMode = MCP_LOOPBACK;
res = mcp2515_setCANCTRL_Mode(MODE_CONFIG);
if(res > 0)
{
# if DEBUG_MODE
Serial.print("Entering Configuration Mode Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Entering Configuration Mode Successful!\r\n");
# endif
// Set Baudrate
if(mcp2515_configRate(canSpeed, canClock))
{
# if DEBUG_MODE
Serial.print("Setting Baudrate Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Setting Baudrate Successful!\r\n");
# endif
if ( res == MCP2515_OK ) {
/* init canbuffers */
mcp2515_initCANBuffers();
/* interrupt mode */
mcp2515_setRegister(MCP_CANINTE, MCP_RX0IF | MCP_RX1IF);
//Sets BF pins as GPO
mcp2515_setRegister(MCP_BFPCTRL,MCP_BxBFS_MASK | MCP_BxBFE_MASK);
//Sets RTS pins as GPI
mcp2515_setRegister(MCP_TXRTSCTRL,0x00);
switch(canIDMode)
{
case (MCP_ANY):
mcp2515_modifyRegister(MCP_RXB0CTRL,
MCP_RXB_RX_MASK | MCP_RXB_BUKT_MASK,
MCP_RXB_RX_ANY | MCP_RXB_BUKT_MASK);
mcp2515_modifyRegister(MCP_RXB1CTRL, MCP_RXB_RX_MASK,
MCP_RXB_RX_ANY);
break;
/* The followingn two functions of the MCP2515 do not work, there is a bug in the silicon.
case (MCP_STD):
mcp2515_modifyRegister(MCP_RXB0CTRL,
MCP_RXB_RX_MASK | MCP_RXB_BUKT_MASK,
MCP_RXB_RX_STD | MCP_RXB_BUKT_MASK );
mcp2515_modifyRegister(MCP_RXB1CTRL, MCP_RXB_RX_MASK,
MCP_RXB_RX_STD);
break;
case (MCP_EXT):
mcp2515_modifyRegister(MCP_RXB0CTRL,
MCP_RXB_RX_MASK | MCP_RXB_BUKT_MASK,
MCP_RXB_RX_EXT | MCP_RXB_BUKT_MASK );
mcp2515_modifyRegister(MCP_RXB1CTRL, MCP_RXB_RX_MASK,
MCP_RXB_RX_EXT);
break;
*/
case (MCP_STDEXT):
mcp2515_modifyRegister(MCP_RXB0CTRL,
MCP_RXB_RX_MASK | MCP_RXB_BUKT_MASK,
MCP_RXB_RX_STDEXT | MCP_RXB_BUKT_MASK );
mcp2515_modifyRegister(MCP_RXB1CTRL, MCP_RXB_RX_MASK,
MCP_RXB_RX_STDEXT);
break;
default:
# if DEBUG_MODE
Serial.print("`Setting ID Mode Failure...\r\n");
# endif
return MCP2515_FAIL;
break;
}
res = mcp2515_setCANCTRL_Mode(mcpMode);
if(res)
{
# if DEBUG_MODE
Serial.print("Returning to Previous Mode Failure...\r\n");
# endif
return res;
}
}
return res;
}
/*********************************************************************************************************
** Function name: mcp2515_write_id
** Descriptions: Write CAN ID
*********************************************************************************************************/
void MCP_CAN::mcp2515_write_id( const INT8U mcp_addr, const INT8U ext, const INT32U id )
{
uint16_t canid;
INT8U tbufdata[4];
canid = (uint16_t)(id & 0x0FFFF);
if ( ext == 1)
{
tbufdata[MCP_EID0] = (INT8U) (canid & 0xFF);
tbufdata[MCP_EID8] = (INT8U) (canid >> 8);
canid = (uint16_t)(id >> 16);
tbufdata[MCP_SIDL] = (INT8U) (canid & 0x03);
tbufdata[MCP_SIDL] += (INT8U) ((canid & 0x1C) << 3);
tbufdata[MCP_SIDL] |= MCP_TXB_EXIDE_M;
tbufdata[MCP_SIDH] = (INT8U) (canid >> 5 );
}
else
{
tbufdata[MCP_SIDH] = (INT8U) (canid >> 3 );
tbufdata[MCP_SIDL] = (INT8U) ((canid & 0x07 ) << 5);
tbufdata[MCP_EID0] = 0;
tbufdata[MCP_EID8] = 0;
}
mcp2515_setRegisterS( mcp_addr, tbufdata, 4 );
}
/*********************************************************************************************************
** Function name: mcp2515_write_mf
** Descriptions: Write Masks and Filters
*********************************************************************************************************/
void MCP_CAN::mcp2515_write_mf( const INT8U mcp_addr, const INT8U ext, const INT32U id )
{
uint16_t canid;
INT8U tbufdata[4];
canid = (uint16_t)(id & 0x0FFFF);
if ( ext == 1)
{
tbufdata[MCP_EID0] = (INT8U) (canid & 0xFF);
tbufdata[MCP_EID8] = (INT8U) (canid >> 8);
canid = (uint16_t)(id >> 16);
tbufdata[MCP_SIDL] = (INT8U) (canid & 0x03);
tbufdata[MCP_SIDL] += (INT8U) ((canid & 0x1C) << 3);
tbufdata[MCP_SIDL] |= MCP_TXB_EXIDE_M;
tbufdata[MCP_SIDH] = (INT8U) (canid >> 5 );
}
else
{
tbufdata[MCP_EID0] = (INT8U) (canid & 0xFF);
tbufdata[MCP_EID8] = (INT8U) (canid >> 8);
canid = (uint16_t)(id >> 16);
tbufdata[MCP_SIDL] = (INT8U) ((canid & 0x07) << 5);
tbufdata[MCP_SIDH] = (INT8U) (canid >> 3 );
}
mcp2515_setRegisterS( mcp_addr, tbufdata, 4 );
}
/*********************************************************************************************************
** Function name: mcp2515_read_id
** Descriptions: Read CAN ID
*********************************************************************************************************/
void MCP_CAN::mcp2515_read_id( const INT8U mcp_addr, INT8U* ext, INT32U* id )
{
INT8U tbufdata[4];
*ext = 0;
*id = 0;
mcp2515_readRegisterS( mcp_addr, tbufdata, 4 );
*id = (tbufdata[MCP_SIDH]<<3) + (tbufdata[MCP_SIDL]>>5);
if ( (tbufdata[MCP_SIDL] & MCP_TXB_EXIDE_M) == MCP_TXB_EXIDE_M )
{
/* extended id */
*id = (*id<<2) + (tbufdata[MCP_SIDL] & 0x03);
*id = (*id<<8) + tbufdata[MCP_EID8];
*id = (*id<<8) + tbufdata[MCP_EID0];
*ext = 1;
}
}
/*********************************************************************************************************
** Function name: mcp2515_write_canMsg
** Descriptions: Write message
*********************************************************************************************************/
void MCP_CAN::mcp2515_write_canMsg( const INT8U buffer_sidh_addr)
{
INT8U mcp_addr;
mcp_addr = buffer_sidh_addr;
mcp2515_setRegisterS(mcp_addr+5, m_nDta, m_nDlc ); /* write data bytes */
if ( m_nRtr == 1) /* if RTR set bit in byte */
m_nDlc |= MCP_RTR_MASK;
mcp2515_setRegister((mcp_addr+4), m_nDlc ); /* write the RTR and DLC */
mcp2515_write_id(mcp_addr, m_nExtFlg, m_nID ); /* write CAN id */
}
/*********************************************************************************************************
** Function name: mcp2515_read_canMsg
** Descriptions: Read message
*********************************************************************************************************/
void MCP_CAN::mcp2515_read_canMsg( const INT8U buffer_sidh_addr) /* read can msg */
{
INT8U mcp_addr, ctrl;
mcp_addr = buffer_sidh_addr;
mcp2515_read_id( mcp_addr, &m_nExtFlg,&m_nID );
ctrl = mcp2515_readRegister( mcp_addr-1 );
m_nDlc = mcp2515_readRegister( mcp_addr+4 );
if (ctrl & 0x08)
m_nRtr = 1;
else
m_nRtr = 0;
m_nDlc &= MCP_DLC_MASK;
mcp2515_readRegisterS( mcp_addr+5, &(m_nDta[0]), m_nDlc );
}
/*********************************************************************************************************
** Function name: mcp2515_getNextFreeTXBuf
** Descriptions: Send message
*********************************************************************************************************/
INT8U MCP_CAN::mcp2515_getNextFreeTXBuf(INT8U *txbuf_n) /* get Next free txbuf */
{
INT8U res, i, ctrlval;
INT8U ctrlregs[MCP_N_TXBUFFERS] = { MCP_TXB0CTRL, MCP_TXB1CTRL, MCP_TXB2CTRL };
res = MCP_ALLTXBUSY;
*txbuf_n = 0x00;
/* check all 3 TX-Buffers */
for (i=0; i<MCP_N_TXBUFFERS; i++) {
ctrlval = mcp2515_readRegister( ctrlregs[i] );
if ( (ctrlval & MCP_TXB_TXREQ_M) == 0 ) {
*txbuf_n = ctrlregs[i]+1; /* return SIDH-address of Buffer*/
res = MCP2515_OK;
return res; /* ! function exit */
}
}
return res;
}
/*********************************************************************************************************
** Function name: MCP_CAN
** Descriptions: Public function to declare CAN class and the /CS pin.
*********************************************************************************************************/
MCP_CAN::MCP_CAN(INT8U _CS)
{
MCPCS = _CS;
MCP2515_UNSELECT();
pinMode(MCPCS, OUTPUT);
}
/*********************************************************************************************************
** Function name: begin
** Descriptions: Public function to declare controller initialization parameters.
*********************************************************************************************************/
INT8U MCP_CAN::begin(INT8U idmodeset, INT8U speedset, INT8U clockset)
{
INT8U res;
SPI5.begin();
res = mcp2515_init(idmodeset, speedset, clockset);
if (res == MCP2515_OK)
return CAN_OK;
return CAN_FAILINIT;
}
/*********************************************************************************************************
** Function name: init_Mask
** Descriptions: Public function to set mask(s).
*********************************************************************************************************/
INT8U MCP_CAN::init_Mask(INT8U num, INT8U ext, INT32U ulData)
{
INT8U res = MCP2515_OK;
# if DEBUG_MODE
Serial.print("Starting to Set Mask!\r\n");
# endif
res = mcp2515_setCANCTRL_Mode(MODE_CONFIG);
if(res > 0){
# if DEBUG_MODE
Serial.print("Entering Configuration Mode Failure...\r\n");
# endif
return res;
}
if (num == 0){
mcp2515_write_mf(MCP_RXM0SIDH, ext, ulData);
}
else if(num == 1){
mcp2515_write_mf(MCP_RXM1SIDH, ext, ulData);
}
else res = MCP2515_FAIL;
res = mcp2515_setCANCTRL_Mode(mcpMode);
if(res > 0){
# if DEBUG_MODE
Serial.print("Entering Previous Mode Failure...\r\nSetting Mask Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Setting Mask Successful!\r\n");
# endif
return res;
}
/*********************************************************************************************************
** Function name: init_Mask
** Descriptions: Public function to set mask(s).
*********************************************************************************************************/
INT8U MCP_CAN::init_Mask(INT8U num, INT32U ulData)
{
INT8U res = MCP2515_OK;
INT8U ext = 0;
# if DEBUG_MODE
Serial.print("Starting to Set Mask!\r\n");
# endif
res = mcp2515_setCANCTRL_Mode(MODE_CONFIG);
if(res > 0){
# if DEBUG_MODE
Serial.print("Entering Configuration Mode Failure...\r\n");
# endif
return res;
}
if((ulData & 0x80000000) == 0x80000000)
ext = 1;
if (num == 0){
mcp2515_write_mf(MCP_RXM0SIDH, ext, ulData);
}
else if(num == 1){
mcp2515_write_mf(MCP_RXM1SIDH, ext, ulData);
}
else res = MCP2515_FAIL;
res = mcp2515_setCANCTRL_Mode(mcpMode);
if(res > 0){
# if DEBUG_MODE
Serial.print("Entering Previous Mode Failure...\r\nSetting Mask Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Setting Mask Successful!\r\n");
# endif
return res;
}
/*********************************************************************************************************
** Function name: init_Filt
** Descriptions: Public function to set filter(s).
*********************************************************************************************************/
INT8U MCP_CAN::init_Filt(INT8U num, INT8U ext, INT32U ulData)
{
INT8U res = MCP2515_OK;
# if DEBUG_MODE
Serial.print("Starting to Set Filter!\r\n");
# endif
res = mcp2515_setCANCTRL_Mode(MODE_CONFIG);
if(res > 0)
{
# if DEBUG_MODE
Serial.print("Enter Configuration Mode Failure...\r\n");
# endif
return res;
}
switch( num )
{
case 0:
mcp2515_write_mf(MCP_RXF0SIDH, ext, ulData);
break;
case 1:
mcp2515_write_mf(MCP_RXF1SIDH, ext, ulData);
break;
case 2:
mcp2515_write_mf(MCP_RXF2SIDH, ext, ulData);
break;
case 3:
mcp2515_write_mf(MCP_RXF3SIDH, ext, ulData);
break;
case 4:
mcp2515_write_mf(MCP_RXF4SIDH, ext, ulData);
break;
case 5:
mcp2515_write_mf(MCP_RXF5SIDH, ext, ulData);
break;
default:
res = MCP2515_FAIL;
}
res = mcp2515_setCANCTRL_Mode(mcpMode);
if(res > 0)
{
# if DEBUG_MODE
Serial.print("Entering Previous Mode Failure...\r\nSetting Filter Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Setting Filter Successfull!\r\n");
# endif
return res;
}
/*********************************************************************************************************
** Function name: init_Filt
** Descriptions: Public function to set filter(s).
*********************************************************************************************************/
INT8U MCP_CAN::init_Filt(INT8U num, INT32U ulData)
{
INT8U res = MCP2515_OK;
INT8U ext = 0;
# if DEBUG_MODE
Serial.print("Starting to Set Filter!\r\n");
# endif
res = mcp2515_setCANCTRL_Mode(MODE_CONFIG);
if(res > 0)
{
# if DEBUG_MODE
Serial.print("Enter Configuration Mode Failure...\r\n");
# endif
return res;
}
if((ulData & 0x80000000) == 0x80000000)
ext = 1;
switch( num )
{
case 0:
mcp2515_write_mf(MCP_RXF0SIDH, ext, ulData);
break;
case 1:
mcp2515_write_mf(MCP_RXF1SIDH, ext, ulData);
break;
case 2:
mcp2515_write_mf(MCP_RXF2SIDH, ext, ulData);
break;
case 3:
mcp2515_write_mf(MCP_RXF3SIDH, ext, ulData);
break;
case 4:
mcp2515_write_mf(MCP_RXF4SIDH, ext, ulData);
break;
case 5:
mcp2515_write_mf(MCP_RXF5SIDH, ext, ulData);
break;
default:
res = MCP2515_FAIL;
}
res = mcp2515_setCANCTRL_Mode(mcpMode);
if(res > 0)
{
# if DEBUG_MODE
Serial.print("Entering Previous Mode Failure...\r\nSetting Filter Failure...\r\n");
# endif
return res;
}
# if DEBUG_MODE
Serial.print("Setting Filter Successfull!\r\n");
# endif
return res;
}
/*********************************************************************************************************
** Function name: setMsg
** Descriptions: Set can message, such as dlc, id, dta[] and so on
*********************************************************************************************************/
INT8U MCP_CAN::setMsg(INT32U id, INT8U rtr, INT8U ext, INT8U len, INT8U *pData)
{
int i = 0;
m_nID = id;
m_nRtr = rtr;
m_nExtFlg = ext;
m_nDlc = len;
for(i = 0; i<MAX_CHAR_IN_MESSAGE; i++)
m_nDta[i] = *(pData+i);
return MCP2515_OK;
}
/*********************************************************************************************************
** Function name: clearMsg
** Descriptions: Set all messages to zero
*********************************************************************************************************/
INT8U MCP_CAN::clearMsg()
{
m_nID = 0;
m_nDlc = 0;
m_nExtFlg = 0;
m_nRtr = 0;
m_nfilhit = 0;
for(int i = 0; i<m_nDlc; i++ )
m_nDta[i] = 0x00;
return MCP2515_OK;
}
/*********************************************************************************************************
** Function name: sendMsg
** Descriptions: Send message
*********************************************************************************************************/
INT8U MCP_CAN::sendMsg()
{
INT8U res, res1, txbuf_n;
uint16_t uiTimeOut = 0;
do {
res = mcp2515_getNextFreeTXBuf(&txbuf_n); /* info = addr. */
uiTimeOut++;
} while (res == MCP_ALLTXBUSY && (uiTimeOut < TIMEOUTVALUE));
if(uiTimeOut == TIMEOUTVALUE)
{
return CAN_GETTXBFTIMEOUT; /* get tx buff time out */
}
uiTimeOut = 0;
mcp2515_write_canMsg( txbuf_n);
mcp2515_modifyRegister( txbuf_n-1 , MCP_TXB_TXREQ_M, MCP_TXB_TXREQ_M );
do
{
uiTimeOut++;
res1 = mcp2515_readRegister(txbuf_n-1); /* read send buff ctrl reg */
res1 = res1 & 0x08;
} while (res1 && (uiTimeOut < TIMEOUTVALUE));
if(uiTimeOut == TIMEOUTVALUE) /* send msg timeout */
return CAN_SENDMSGTIMEOUT;
return CAN_OK;
}
/*********************************************************************************************************
** Function name: sendMsgBuf
** Descriptions: Send message to transmitt buffer
*********************************************************************************************************/
INT8U MCP_CAN::sendMsgBuf(INT32U id, INT8U ext, INT8U len, INT8U *buf)
{
INT8U res;
setMsg(id, 0, ext, len, buf);
res = sendMsg();
return res;
}
/*********************************************************************************************************
** Function name: sendMsgBuf
** Descriptions: Send message to transmitt buffer
*********************************************************************************************************/
INT8U MCP_CAN::sendMsgBuf(INT32U id, INT8U len, INT8U *buf)
{
INT8U ext = 0, rtr = 0;
INT8U res;
if((id & 0x80000000) == 0x80000000)
ext = 1;
if((id & 0x40000000) == 0x40000000)
rtr = 1;
setMsg(id, rtr, ext, len, buf);
res = sendMsg();
return res;
}
/*********************************************************************************************************
** Function name: readMsg
** Descriptions: Read message
*********************************************************************************************************/
INT8U MCP_CAN::readMsg()
{
INT8U stat, res;
stat = mcp2515_readStatus();
if ( stat & MCP_STAT_RX0IF ) /* Msg in Buffer 0 */
{
mcp2515_read_canMsg( MCP_RXBUF_0);
mcp2515_modifyRegister(MCP_CANINTF, MCP_RX0IF, 0);
res = CAN_OK;
}
else if ( stat & MCP_STAT_RX1IF ) /* Msg in Buffer 1 */
{
mcp2515_read_canMsg( MCP_RXBUF_1);
mcp2515_modifyRegister(MCP_CANINTF, MCP_RX1IF, 0);
res = CAN_OK;
}
else
res = CAN_NOMSG;
return res;
}
/*********************************************************************************************************
** Function name: readMsgBuf
** Descriptions: Public function, Reads message from receive buffer.
*********************************************************************************************************/
INT8U MCP_CAN::readMsgBuf(INT32U *id, INT8U *ext, INT8U *len, INT8U buf[])
{
if(readMsg() == CAN_NOMSG)
return CAN_NOMSG;
*id = m_nID;
*len = m_nDlc;
*ext = m_nExtFlg;
for(int i = 0; i<m_nDlc; i++)
buf[i] = m_nDta[i];
return CAN_OK;
}
/*********************************************************************************************************
** Function name: readMsgBuf
** Descriptions: Public function, Reads message from receive buffer.
*********************************************************************************************************/
INT8U MCP_CAN::readMsgBuf(INT32U *id, INT8U *len, INT8U buf[])
{
if(readMsg() == CAN_NOMSG)
return CAN_NOMSG;
if (m_nExtFlg)
m_nID |= 0x80000000;
if (m_nRtr)
m_nID |= 0x40000000;
*id = m_nID;
*len = m_nDlc;
for(int i = 0; i<m_nDlc; i++)
buf[i] = m_nDta[i];
return CAN_OK;
}
/*********************************************************************************************************
** Function name: checkReceive
** Descriptions: Public function, Checks for received data. (Used if not using the interrupt output)
*********************************************************************************************************/
INT8U MCP_CAN::checkReceive(void)
{
INT8U res;
res = mcp2515_readStatus(); /* RXnIF in Bit 1 and 0 */
if ( res & MCP_STAT_RXIF_MASK )
return CAN_MSGAVAIL;
else
return CAN_NOMSG;
}
/*********************************************************************************************************
** Function name: checkError
** Descriptions: Public function, Returns error register data.
*********************************************************************************************************/
INT8U MCP_CAN::checkError(void)
{
INT8U eflg = mcp2515_readRegister(MCP_EFLG);
if ( eflg & MCP_EFLG_ERRORMASK )
return CAN_CTRLERROR;
else
return CAN_OK;
}
/*********************************************************************************************************
** Function name: getError
** Descriptions: Returns error register value.
*********************************************************************************************************/
INT8U MCP_CAN::getError(void)
{
return mcp2515_readRegister(MCP_EFLG);
}
/*********************************************************************************************************
** Function name: mcp2515_errorCountRX
** Descriptions: Returns REC register value
*********************************************************************************************************/
INT8U MCP_CAN::errorCountRX(void)
{
return mcp2515_readRegister(MCP_REC);
}
/*********************************************************************************************************
** Function name: mcp2515_errorCountTX
** Descriptions: Returns TEC register value
*********************************************************************************************************/
INT8U MCP_CAN::errorCountTX(void)
{
return mcp2515_readRegister(MCP_TEC);
}
/*********************************************************************************************************
** Function name: mcp2515_enOneShotTX
** Descriptions: Enables one shot transmission mode
*********************************************************************************************************/
INT8U MCP_CAN::enOneShotTX(void)
{
mcp2515_modifyRegister(MCP_CANCTRL, MODE_ONESHOT, MODE_ONESHOT);
if((mcp2515_readRegister(MCP_CANCTRL) & MODE_ONESHOT) != MODE_ONESHOT)
return CAN_FAIL;
else
return CAN_OK;
}
/*********************************************************************************************************
** Function name: mcp2515_disOneShotTX
** Descriptions: Disables one shot transmission mode
*********************************************************************************************************/
INT8U MCP_CAN::disOneShotTX(void)
{
mcp2515_modifyRegister(MCP_CANCTRL, MODE_ONESHOT, 0);
if((mcp2515_readRegister(MCP_CANCTRL) & MODE_ONESHOT) != 0)
return CAN_FAIL;
else
return CAN_OK;
}
/*********************************************************************************************************
** Function name: mcp2515_abortTX
** Descriptions: Aborts any queued transmissions
*********************************************************************************************************/
INT8U MCP_CAN::abortTX(void)
{
mcp2515_modifyRegister(MCP_CANCTRL, ABORT_TX, ABORT_TX);
// Maybe check to see if the TX buffer transmission request bits are cleared instead?
if((mcp2515_readRegister(MCP_CANCTRL) & ABORT_TX) != ABORT_TX)
return CAN_FAIL;
else
return CAN_OK;
}
/*********************************************************************************************************
** Function name: setGPO
** Descriptions: Public function, Checks for r
*********************************************************************************************************/
INT8U MCP_CAN::setGPO(INT8U data)
{
mcp2515_modifyRegister(MCP_BFPCTRL, MCP_BxBFS_MASK, (data<<4));
return 0;
}
/*********************************************************************************************************
** Function name: getGPI
** Descriptions: Public function, Checks for r
*********************************************************************************************************/
INT8U MCP_CAN::getGPI(void)
{
INT8U res;
res = mcp2515_readRegister(MCP_TXRTSCTRL) & MCP_BxRTS_MASK;
return (res >> 3);
}
/*********************************************************************************************************
END FILE
*********************************************************************************************************/
プログラムを実行するとArduino IDEターミナルに以下のように表示されます
18:08:56.755 -> cxd56_farapiinitialize: Mismatched version: loader(17696) != Self(20166)
18:08:56.790 -> cxd56_farapiinitialize: Please update loader and gnssfw firmwares!!
18:08:57.031 -> Entering Configuration Mode Successful!
18:08:57.031 -> Setting Baudrate Successful!
18:08:57.031 -> MCP2515 Initialized Successfully!
18:08:57.031 -> MCP2515 Library Loopback Example...
18:08:58.454 -> Message Sent Successfully!
18:08:58.454 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:08:59.449 -> Message Sent Successfully!
18:08:59.449 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:00.448 -> Message Sent Successfully!
18:09:00.448 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:01.449 -> Message Sent Successfully!
18:09:01.449 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:02.449 -> Message Sent Successfully!
18:09:02.449 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:03.452 -> Message Sent Successfully!
18:09:03.452 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:04.450 -> Message Sent Successfully!
18:09:04.450 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:05.446 -> Message Sent Successfully!
18:09:05.446 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:06.443 -> Message Sent Successfully!
18:09:06.443 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:07.442 -> Message Sent Successfully!
18:09:07.442 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:08.440 -> Message Sent Successfully!
18:09:08.440 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:09.471 -> Message Sent Successfully!
18:09:09.471 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:10.440 -> Message Sent Successfully!
18:09:10.440 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:11.470 -> Message Sent Successfully!
18:09:11.470 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:12.464 -> Message Sent Successfully!
18:09:12.464 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:13.467 -> Message Sent Successfully!
18:09:13.467 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:14.466 -> Message Sent Successfully!
18:09:14.466 -> Standard ID: 0x100 DLC: 8 Data: 0xAA 0x55 0x01 0x10 0xFF 0x12 0x34 0x56
18:09:15.470 -> Message Sent Successfully!