#はじめに
PCLを使用して認識した物体をロボットから把持するときに、その把持位置を決定する必要があります。その時にjsk_pcl_rosパッケージのDetectGraspablePosesPcabaseが使えそうだと思い使い方を調べてみました。
#ノードの解説
jsk_pcl_rosパッケージのdetect_graspable_poses_pcabase.pyが今回使用するプログラム名で、ターゲットオブジェクトの点群とPCAアルゴリズムを使用し把持姿勢の候補を出力します。
また,ROSインターフェースの名前やデータ型などは以下のようになります。
-
Subscribing Topic
~input(sensor_msgs/PointCloud2):入力点群(RGBフィールドが必要) -
Publishing Topic
~output/can_grasp_poses(geometry_msgs/PoseArray):ロボットが掴むことのできる姿勢のリスト -
Parameters
~direction(Character,default:x):この方向からターゲットをつかもうとする
~hand_width[m](Float,default:0.13):ロボットハンドの開くことができる長さ
~interval_m[m](Float,default:0.04):出力する姿勢の間隔,把持姿勢の候補を増やしたい場合はこの値を減らします。
#使ってみる
以下のパッケージを使うとdetect_graspable_poses_pcabaseを簡単に試すことができます。
以下の手順で実行できます。
###インストール
sudo apt-get install -y ros-melodic-jsk-pcl-ros
sudo apt-get install -y ros-melodic-jsk-visualization
git clone https://github.com/hoshianaaa/jsk_pcl_ros_samples.git
###ビルド
cd ~/catkin_ws/src
catkin build
または
catkin make
source ~/catkin_ws/devel/setup.bash
roslaunch jsk_pcl_ros_samples detect_graspable_poses_pcabase.launch
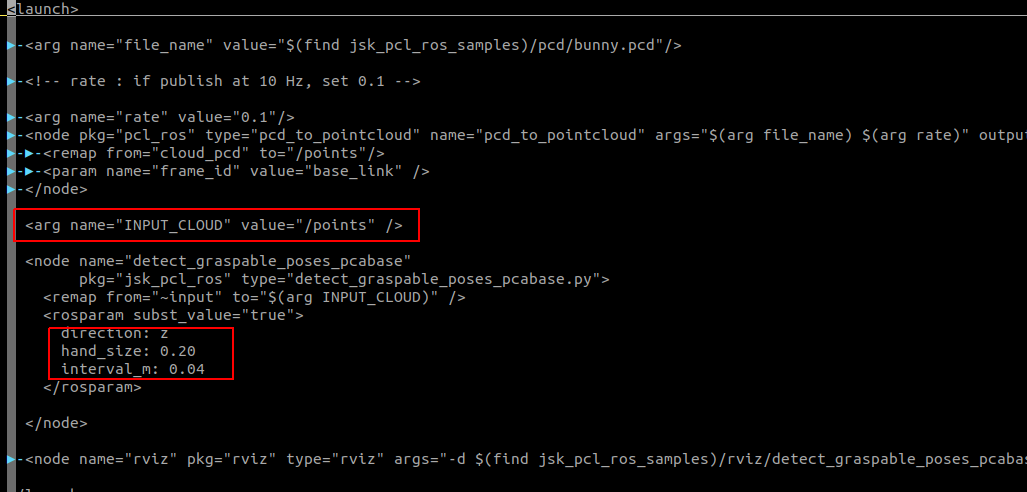
今回作成したlaunchは以下の写真のようになっていて
- 入力するPointCloud2データのデータ名
- 把持方向,ロボットのハンドの幅,把持姿勢候補の間隔
を設定しています。
<launch>
<arg name="file_name" value="$(find jsk_pcl_ros_samples)/pcd/bunny.pcd"/>
<!-- rate : if publish at 10 Hz, set 0.1 -->
<arg name="rate" value="0.1"/>
<node pkg="pcl_ros" type="pcd_to_pointcloud" name="pcd_to_pointcloud" args="$(arg file_name) $(arg rate)" output="screen">
<remap from="cloud_pcd" to="/points"/>
<param name="frame_id" value="base_link" />
</node>
<arg name="INPUT_CLOUD" value="/points" />
<node name="detect_graspable_poses_pcabase"
pkg="jsk_pcl_ros" type="detect_graspable_poses_pcabase.py">
<remap from="~input" to="$(arg INPUT_CLOUD)" />
<rosparam subst_value="true">
direction: z
hand_size: 0.20
interval_m: 0.04
</rosparam>
</node>
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find jsk_pcl_ros_samples)/rviz/detect_graspable_poses_pcabase.rviz" required="true" />
</launch>
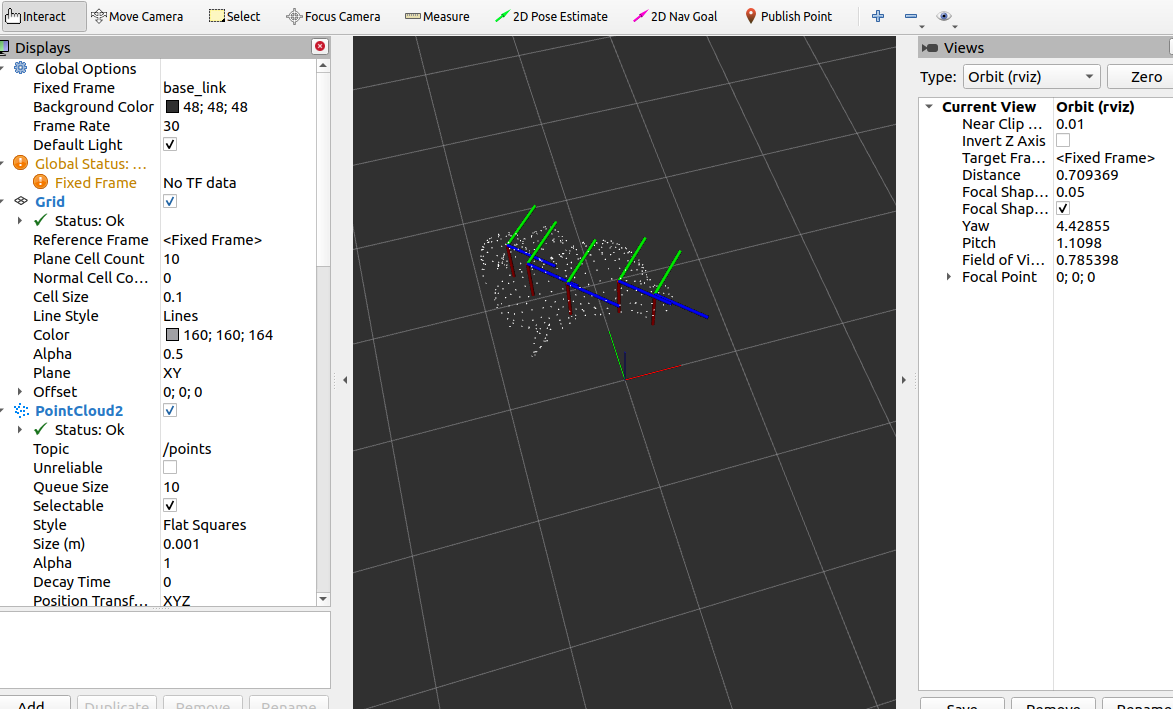
実行するとbunny.pcdの点群の把持姿勢の候補が出力され,その様子が以下の写真のようにrviz上で確認できます。
#参考
- ドキュメント
- 本家サンプル