vscodeでC++の拡張機能が不可解なエラーを出す
VSCodeでROSの開発をしているのですが、エラーが出ています。ビルドは通り、include pathも適切に設定しているはずです。非常に不可解なので助けてください。
発生している問題・エラー

該当するソースコード
c_cpp_properties.json
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": false
},
"includePath": [
"/home/yugo/catkin_ws/devel/include/**",
"/opt/ros/noetic/include/**",
"/usr/include/**"
],
"name": "ROS",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "c++14"
}
],
"version": 4
}
#include <cppad/cppad.hpp>
#include <iostream>
#include "ros/ros.h"
int main( int argc, char** argv )
{
ros::init( argc, argv, "optimize_test" );
std::vector<CppAD::AD<double>> ax(2);
CppAD::Independent(ax);
std::vector<CppAD::AD<double>> ay(1);
ay[0] = 2 * CppAD::pow(ax[0], 3) + CppAD::pow(ax[1], 2);
CppAD::ADFun<double> f(ax, ay);
std::vector<double> x(2);
x[0] = 2;
x[1] = 3;
std::vector<double> fw0 = f.Forward(0, x);
std::cout << fw0[0] << "=f(" << x[0] << "," << x[1] << ")" << std::endl;
std::vector<double> jac = f.Jacobian(x);
std::cout << jac[0] << "=dy/dx0(" << x[0] << "," << x[1] << ")" << std::endl;
std::cout << jac[1] << "=dy/dx1(" << x[0] << "," << x[1] << ")" << std::endl;
}
自分で試したこと
半年前まで問題なかった他のワークスペースでは、補完やエラー表示、変数の色の変化が全く効かなかったため、拡張機能周りの設定と踏んでいます。
拡張機能の再インストール、vscode本体の再インストールまでしましたがだめでした。また、c/c++の拡張機能を半年前のバージョン(v1.21.6)まで戻しましたがだめでした。
buildは通ります。
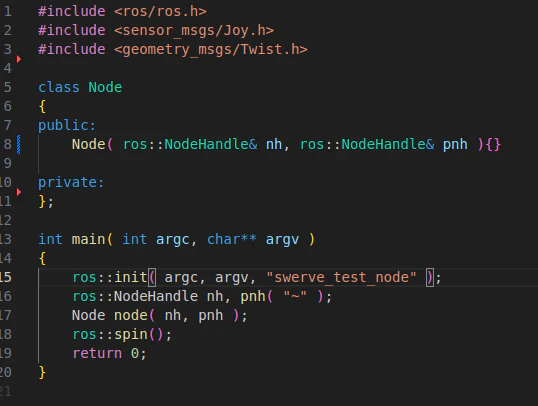
以下半年前まで動いていたワークスペース(パッケージ)です。classの中身は削除していますが、ビルドも通りましたし症状も同じです。
症状
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": false
},
"includePath": [
"/home/yugo/catkin_ws/devel/include/**",
"/opt/ros/noetic/include/**",
"/usr/include/**"
],
"name": "ROS",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "c++14"
}
],
"version": 4
}
0 likes