Step1 Ubuntuを立ち上げる
Step1-1 Virtual BoxにUbuntuをインストール
WindowsにVirtual BoxをUbuntuをインストールします。
次の記事に従ってセットアップを行ってください。
Windows10にVirtualBoxとUbuntuをインストール
Step1-2 Ubuntuの環境をupdate & upgradeする
ターミナルを立ち上げて(ctl + alt + t), ubuntuの環境を更新します
$ sudo apt update
$ sudo apt upgrade
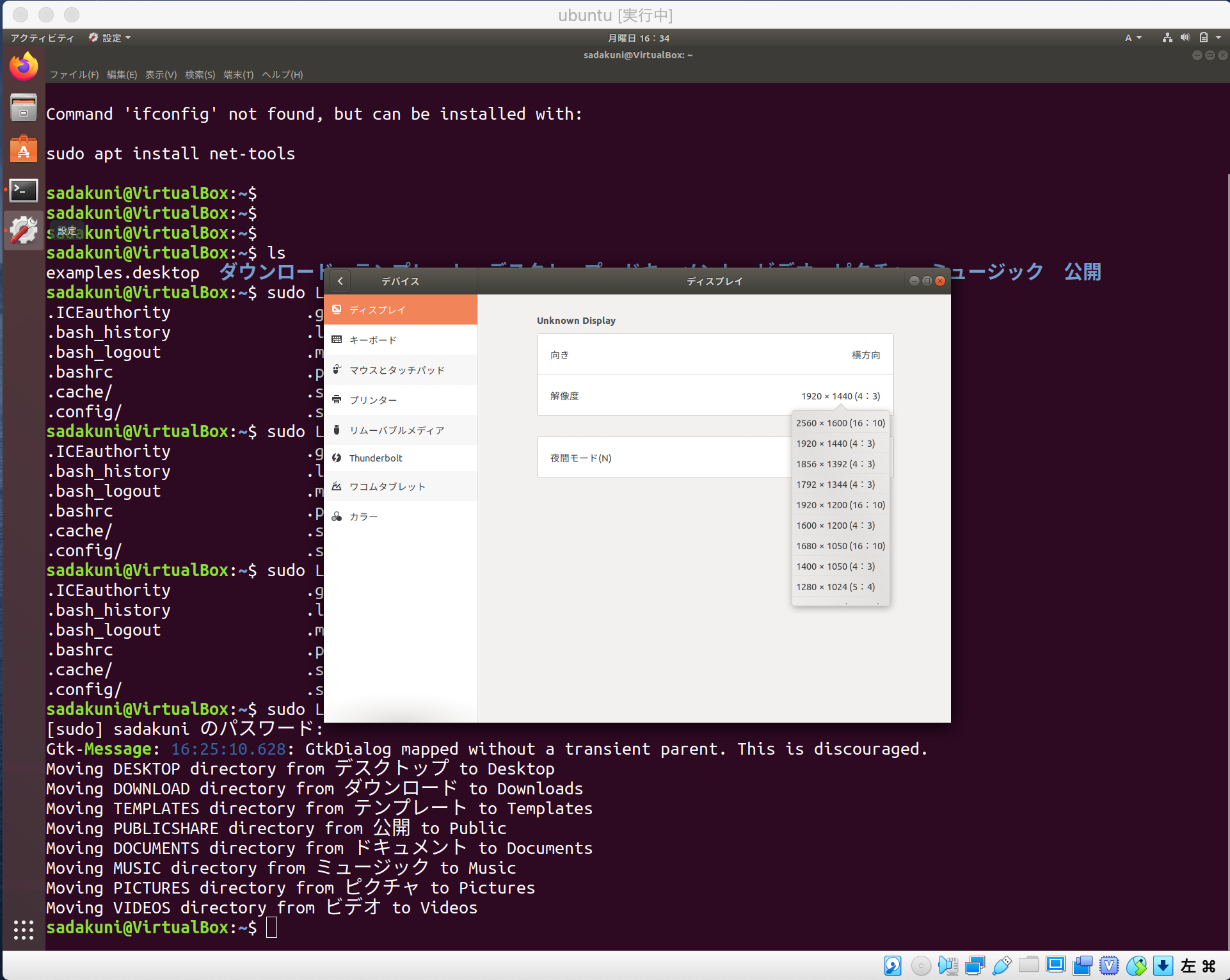
Step1-3 画面サイズを変更する
VirtualBoxにインストールしたUbuntuの画面サイズは640×480になっています。
このままでは不便なので、画面サイズを1980x1260などにしておくと使いやすいです。
設定→デバイス→ディスプレイ→解像度にて変更ができます。
Step1-4 ホームディレクトリの中身を英語にする
Ubuntuで日本語を選択すると、ホームディレクトリに日本語のディレクトリが作られます。
CLIを利用する際に、日本語のディレクトリでは操作が不便のため、英語表記に変更します。
Step1-5 VirtualBox上ゲストOSにssh接続設定
VirtualBox上OSで作業すると、ホストOSとの画面の切り替えがめんどくさかったり、ゲストOS内でブラウザの処理が遅かったり、手間が多いです。そこで、VirtualBoxからはバックグラウンドでOSを立ち上げ、sshでゲストOSに接続できるようにします。
[[VirtualBox] Windowsから、UbuntuにSSH接続する方法]
(https://qiita.com/Gotcha/items/e82eb6c2d4d289e5bcd1)
Virtualbox上のubuntuにssh接続する
Step1-6 関係ライブラリをインストール
- Git
- Vim
Step2 ROS2インストール
ROS2が動かせるようにセットアップしていきます。
Step2-1 パッケージのリポジトリを設定
リポジトリのGPG鍵を許可する
$ sudo apt update
$ sudo apt install curl gnupg2 lsb-release
$ curl http://repo.ros2.org/repos.key | sudo apt-key add
リポジトリからパッケージを受容するように下記の実行でリポジトリを登録
$ sudo sh -c 'echo "deb [arch=amd64,arm64] http://packages.ros.org/ros2/ubuntu `lsb_release -cs` main" > /etc/apt/sources.list.d/ros2-latest.list'
Step2-2 ROS2パッケージをインストール
$ export CHOOSE_ROS_DISTRO=dashing
$ sudo apt update
$ sudo apt install ros-${CHOOSE_ROS_DISTRO}-desktop
Step2-3 Colton buildインストール
$ sudo apt install python3-colcon-common-extensions
Step2-4 ROS2コマンドの補完を設定
$ sudo apt install python3-argcomplete
Step2-5 環境変数を設定する
$ echo "source /opt/ros/${CHOOSE_ROS_DISTRO}/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
Step2-6 ワークスペースの設定
$ mkdir -p ~/ros2_ws/src
$ cd ~/ros2_ws
$ colcon build
$ echo "source ~/ros2_ws/install/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
Step2-7 動作テスト
1つ目ののターミナルで1秒毎にメッセージがPublish(送信)されます。
Terminal1
$ ros2 run demo_nodes_cpp talker
[INFO] [talker]: Publishing: 'Hello World: 1'
[INFO] [talker]: Publishing: 'Hello World: 2'
2つ目のターミナルで1秒毎にメッセージがsubscribe(受信)されます。
$ ros2 run demo_nodes_cpp listener
[INFO] [listener]: I heard: [Hello World: 1]
[INFO] [listener]: I heard: [Hello World: 2]