はじめに
前回の記事"触覚VRデバイスの実装3:指への力覚提示(多指+2軸)"の実機を組み立てたのでデモを投稿します。
実現したい触覚
・手で硬いモノを握ったときのグリップ感(握ったときの物体からの反力)
こちらの記事"触覚VRデバイスの実装2:人差し指への力覚提示"で紹介したデバイスにアップデートを加え、1軸から2軸での力覚提示にしています。
外観
デバイス単体
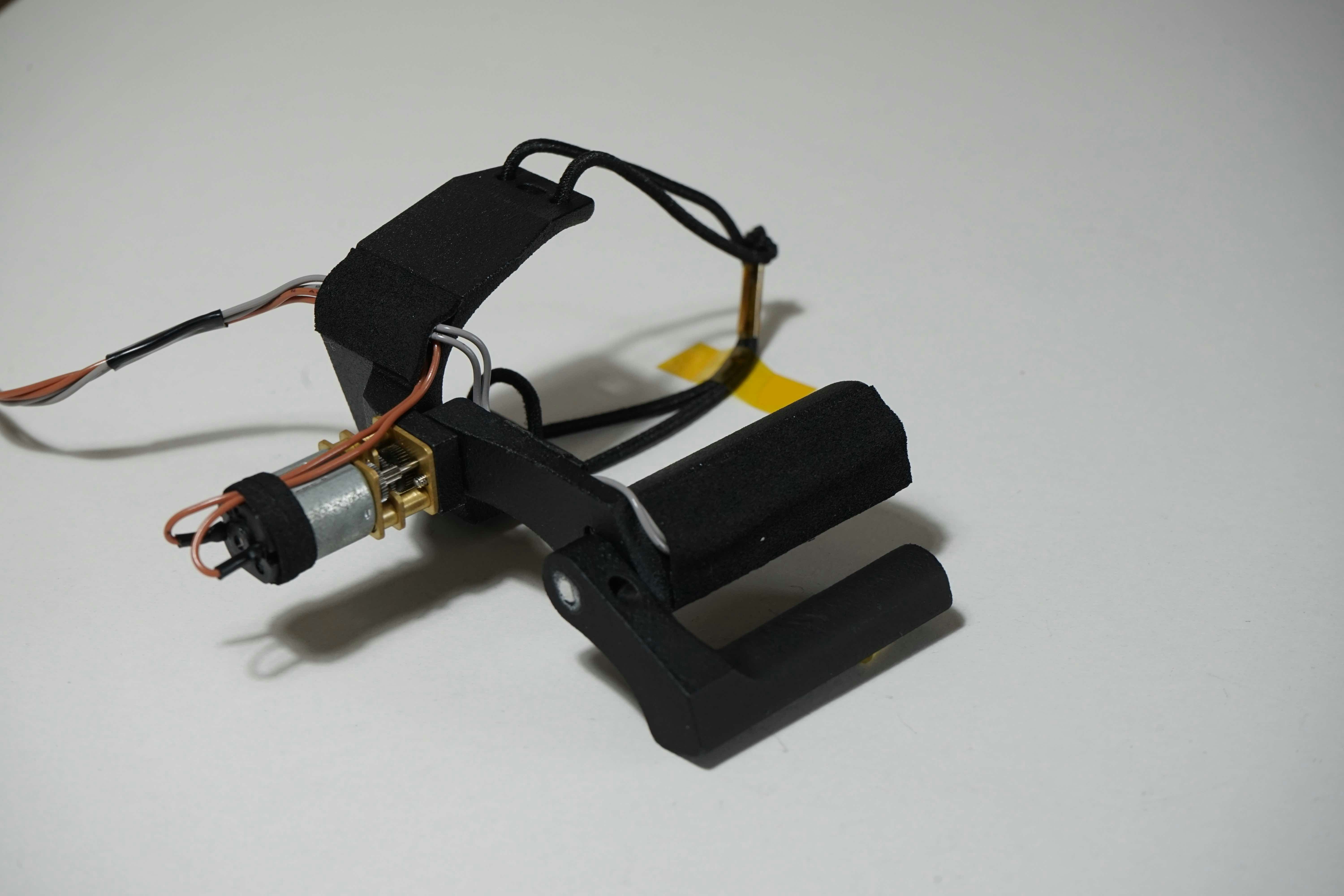

装着時:2軸で指に力覚を提示する。

折りたたみ時

動作
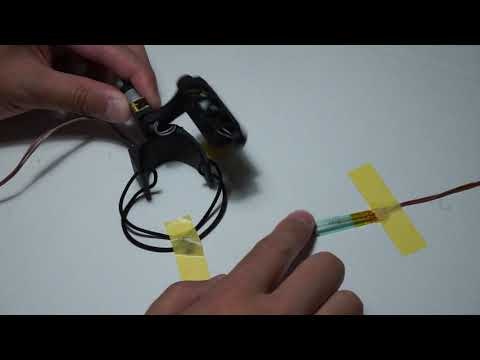
生成される触覚・力覚の確認のための簡単な動作テストです。感圧センサを右手の人差し指の腹に固定。右手の人差し指の腹で感じる力覚を左手にコピーしています。具体的には右手の感圧センサの値をPWM値に変換して左手のデバイスのモータにドライバを介して出力しています。
◼️テスト動作 感圧センサ → モータ駆動
クリックで動画再生
https://www.youtube.com/watch?v=axKi0lAL-4I
◼️装着時の動き
クリックで動画再生
https://www.youtube.com/watch?v=nP_xqtRnZJI

※デバイスの感触を確かめるための簡易的なテストのため、デバイスの動作速度に合うように手を閉じる速さをユーザ側で調整しています。
使用感と今後
"モノを握っている感"は1軸より2軸提示の方が表現できているように感じます。
次は親指への力覚提示を検討します。
以上