はじめに
前回の投稿"触覚VRデバイスの実装2 人差し指への力覚提示"では、人差し指に特化した触覚提示デバイスをまとめました。
使った感触を元に以下に挙げる変更点を加えたデバイスを設計しました。(DMMに3Dプリントを発注しましたが、発送が遅れているため今回は実機デモはありません。届いて組み立てて制御を入れたら投稿します。)
[2019.08.27 更新]
実機デモはこちらを↓
"触覚VRデバイスの実装3:指への力覚提示(多指+2軸)~実機デモ~"
前回からの変更点
・(前回)人差し指のみへの触覚提示 → (今回)人差し指となか指への触覚提示
・(前回)掌に近い方の関節(腹)のみへの触覚提示(1軸)→ (今回)2つの関節(腹)への触覚提示(2軸)

設計(3D CAD)
前回のデバイスは触覚を提示しないときは指の動作を邪魔しないよう折りたたむことができましたが、今回も引き継いだ設計にしています。狙いは大きなVR空間を自由に動き回ることを想定した時に、触覚提示が不要な場合に手の動作に違和感を与えないことです。
1軸目の触覚提示部にモータを仕込み、2軸目を駆動します。1軸目と2軸目を個別に制御可能です。
できれば角度センサを組み込みたかったのですが、以下の理由で断念。
・以前の記事(触覚VRデバイスGravity Grabberを作ってみた)で採用したような安価なポテンショメータはサイズが大きく設置が難しい
・ロータリーエンコーダ入りの小型モータは高価
予算がある方は小型のロータリエンコーダ付きモータを使うとより高度な制御ができます。
本家Gravity Grabberではmaxonのロータリエンコーダ付きモータが使われている。
ただ、今回の構成でもモータドライバ側で電流監視は可能なのでトルク制御のみ可能な仕様。

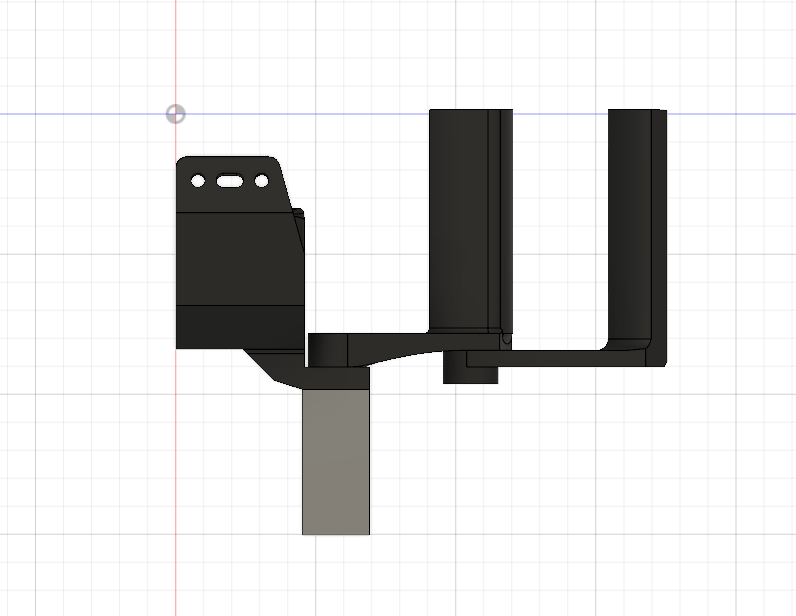
◼️Side

◼️Top
◼️Bottom
モータ放熱と軽量化のためメッシュ構造にした。

手にはめるとこんな感じ
(Autodesk Fusion360のレンダリング機能を使いました。)
◼️展開時


人差し指と中指に触覚を提示できる。

◼️折りたたみ時
折りたたまれると、コンパクトにまとまる。指の動作を邪魔しない。


おわりに
今回は、CADモデル設計のみの掲載でした。パーツが届いたら記事を投稿します。
以上