学校の学園祭で使用しました。備忘録として残しておきます。
はじめに
今回は純正環境ではなく、Open Roberta Lab を使用して動作させるために、カスタムOSである leJOS 0.9.1 をEV3に導入しました。
leJOSは純正OSを改変せず、MicroSDカードから起動する方式のため、いつでも簡単に純正OSへ戻すことができます。安全かつ快適にEV3を活用できる構成です。
動作環境・必要なもの
- EV3本体
- PC(Windows)
- Google Chrome
- MicroSDカード
- SDカードリーダー
- EV3本体とPCを接続するUSBケーブル
- インターネット環境
- 管理者権限(ソフトウェアのインストール時に使用)
Open Roberta Labでのプログラム作成
アクセス
以下のリンクからアクセスします。
プログラム制作画面へ入る
- 「Open Roberta Sim EV3 leJOS 0.9.1」を選択
- 「get started →」をクリック
Scratchベースでプログラムを制作できます。
プログラムの保存・読み込み
メニューの
Edit → import program / export program
から、制作したプログラムの読み込み・書き出しが可能です。
※内部的にはJavaベースで動作しているため、Java言語で直接プログラミングすることも可能です。
EV3本体側の設定手順
1. MicroSDカードのフォーマット
MicroSDカードは以下の条件を満たす必要があります。
- ファイル形式:FAT32
- パーティションサイズ:16GB以下
注意
Windowsのエクスプローラーでは、32GBを超えるSDカードをFAT32形式でフォーマットすることはできません。
そのため、外部ソフトを使用します。
使用ソフト
AOMEI Partition Assistant Standard
https://www.diskpart.com/free-partition-manager.html
手順
- 管理者として起動
- SDカードを選択
- 「パーティションを作成」
- サイズを 4096MB に設定
- ファイルシステム:FAT32を選択
- 「未割り当て領域を残す」に設定
- 左上の「適用」ボタンをクリック → 実行
必要ファイルのダウンロード
leJOSのダウンロード
以下からダウンロードします。
ファイル名:
OpenRobertaFirmware-xyz-release.zip
※ x.y.z はバージョン番号
Java(EV3用)のダウンロード
Oracle Java SE Embedded version 7 Update 60 を使用します。
ファイル名:
ejre-7u60-b19-ejre-7u60-fcs-b19-linux-arm-sflt-headless-07_may_2014.tar.gz
ダウンロード先:
※ Oracleアカウント(無料)が必要です。
SDカードへのファイル配置
leJOSの配置
OpenRobertaFirmware-xyz-release.zip
を解凍し、中身をすべてSDカード直下へコピーします。
Javaファイルの配置
ejre-7u60-b19-ejre-7u60-fcs-b19-linux-arm-sflt-headless-07_may_2014.tar.gz
は解凍せず、そのままSDカード直下へ配置します。
ファイル構成の確認
以下の構成になっていることを確認してください。
SDCard/
├ lejos/
├ boot
├ ejre-7u60-b19-ejre-7u60-fcs-b19-linux-arm-sflt-headless-07_may_2014.tar.gz
├ lejosimage.bz2
├ rootfs.cpio.gz
├ uImage
└ version
確認後、安全にSDカードを取り外します。
leJOSの起動
- EV3本体の電源が切れていることを確認
- MicroSDカードを挿入
- 決定ボタンを押して起動
インストールは自動で行われます。
- 初回起動は約10分程度かかります
- インストール完了後、短いメロディーが鳴ります
以降は短時間で起動するようになります。
起動の仕組み
- MicroSDカードあり → leJOS起動
- MicroSDカードなし → 純正OS起動
PC側の設定手順
今回はPCとEV3本体の通信に有線接続を採用しました。
そのため Open Roberta Connector を導入します。
1. Javaのインストール
Java 8以降が必要です。
2. Open Roberta Connectorのダウンロード
以下のファイルをダウンロードします。
OpenRobertaConnectorSetupEN-v.x.y.z.msi
3. Open Roberta Connectorのインストール
ダウンロードしたファイルを実行し、ダイアログに従ってインストールします。
4. USBドライバーのインストール
ダウンロード先:
手順
- cabファイルを解凍
- 「RNDIS.inf」を右クリック
- 「インストール」を選択
EV3との接続
- Open Roberta Connectorを起動
- EV3本体をUSBケーブルで接続
認識されると「LEGO EV3(機体名)」と表示されます。
「connect」ボタンをクリックすると接続用トークンが生成されます。
表示されたトークンをコピーします。
Open Roberta Labとの接続
- プログラム画面で
Robot → connect - トークンを貼り付け
- 接続完了
右下のボタンから
- プログラム転送
- 転送して実行
が可能です。

参考リンク
- Open Roberta Lab
https://lab.open-roberta.org/ - Open Roberta Wiki(leJOS 0.9.1セットアップ)
https://jira.iais.fraunhofer.de/wiki/spaces/ORInfo/pages/42992402/Set+up+EV3+-+System+leJOS+0.9.1 - Open Roberta Connector
https://jira.iais.fraunhofer.de/wiki/spaces/ORInfo/pages/90802891/Open+Roberta+Connector - EV3(leJOS)Driver Installation
https://jira.iais.fraunhofer.de/wiki/spaces/ORInfo/pages/31654982/EV3+leJOS+driver+installation+under+Windows+8+10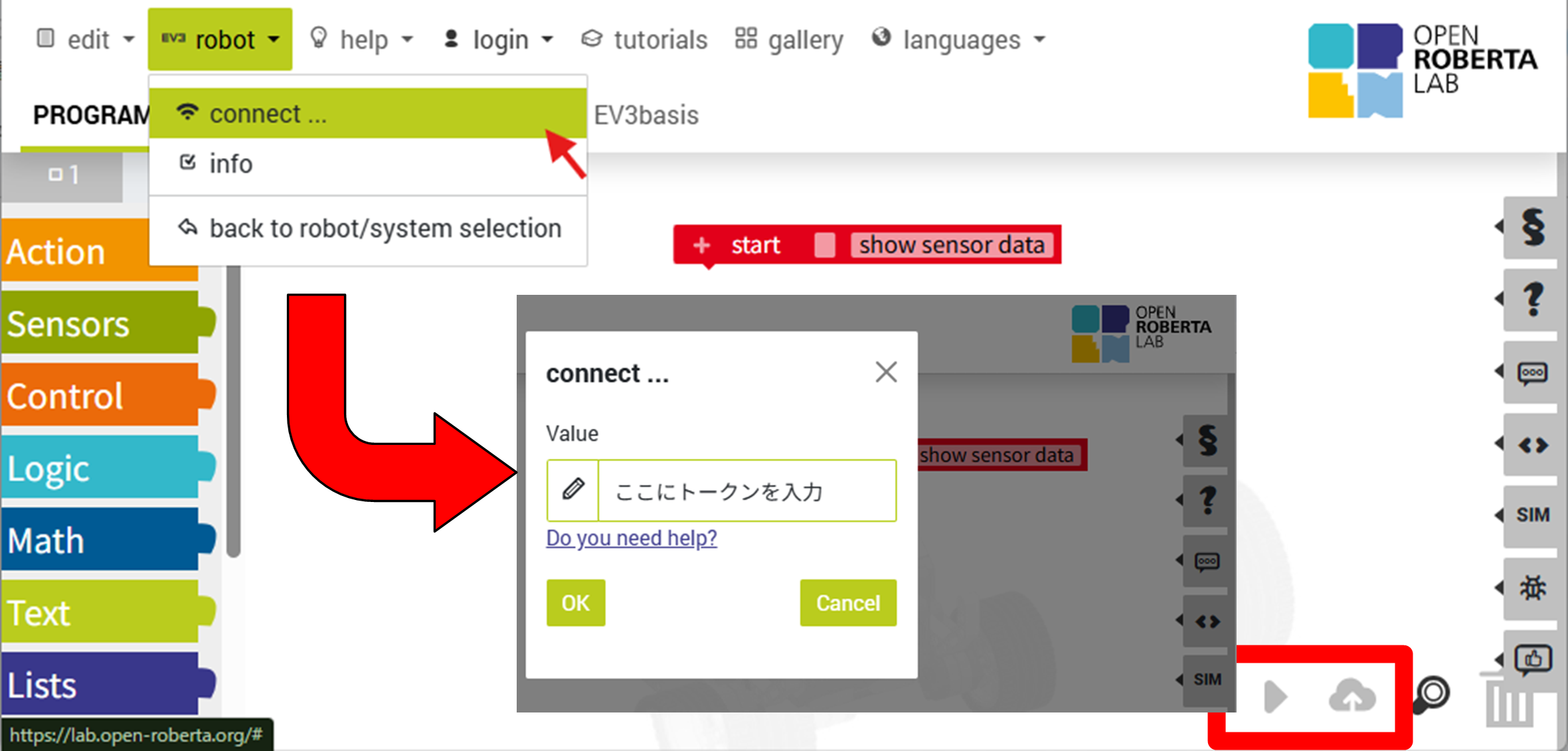
まとめ
MicroSDカード起動方式を採用することで、
- 純正OSを保持したまま利用可能
- Javaベース開発が可能
- Scratchベースでの視覚的プログラミングも可能
という柔軟な開発環境を構築できます。
EV3をより本格的に活用したい方には有効な構成です。