前回の記事
前回はUbuntu22.04までの準備をしました。
VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(準備編)
今回はROS2を導入したいと思います。
手順
- ホストOS(Windows11)準備
- ゲストOS(Ubuntu 22.04(LTS))準備
- ROS2導入 ←今回はここの内容
- Open-RMF導入
- デモ操作
思いのほか長くなりそうだったので、いくつかの記事に分割しています。
VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(準備編)
VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(ROS2導入編)
VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(Open-RMF導入編)
VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(デモ操作①)
3.ROS2導入
公式を参考にROS2を導入していきます。
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
localeの確認
localeの設定が「UTF-8」じゃない場合、設定が必要です。
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings
レポジトリ設定
Ubuntu Universeレポジトリの設定
sudo apt install software-properties-common
sudo add-apt-repository universe
ROS2 GPGキーの設定
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
レポジトリをソースのリストに追加
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
ROS2導入
次にROS2の導入になります。
事前にパッケージの更新を行っておきます。
sudo apt update && sudo apt upgrade
今回は「ros-humble-desktop」を導入します。
sudo apt install ros-humble-desktop
sourceスクリプトの設定
毎回読み込まなくてもよいように.bashrcにsetup.bashを登録しておきます。
vi ~/.bashrc
下記を追加
source /opt/ros/humble/setup.bash
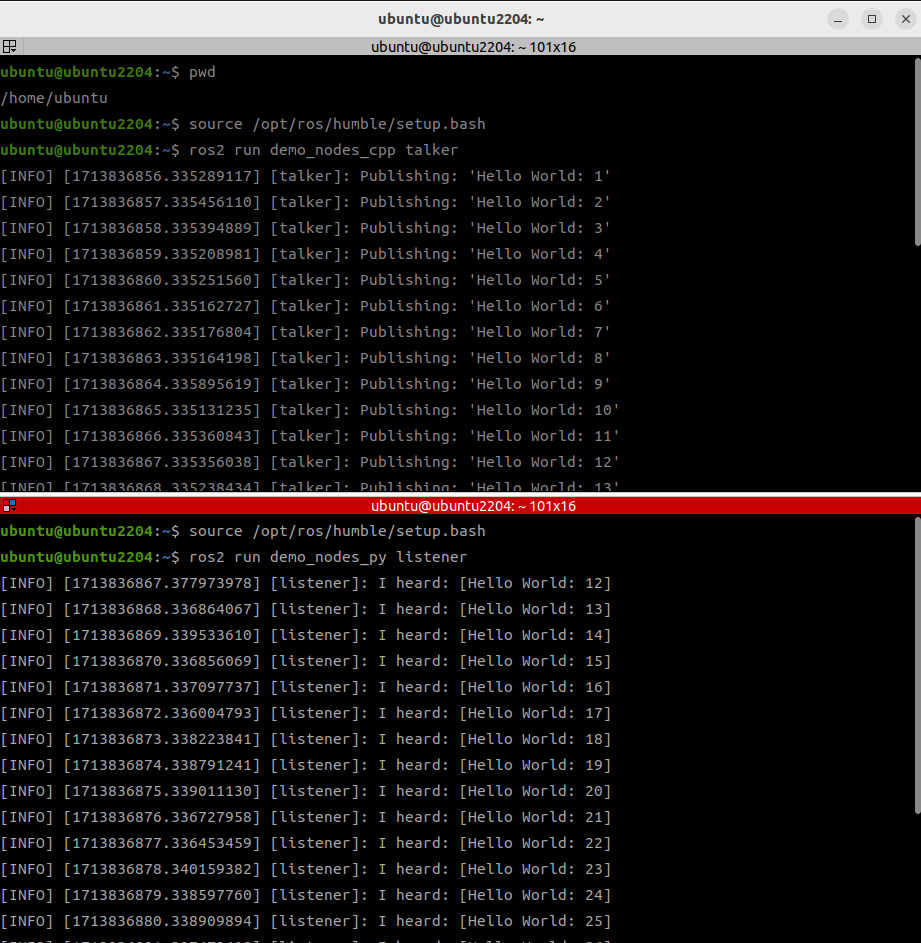
動作確認
ROS2が動作するかを確認します。
2つのウインドウでそれぞれコマンドを実行してください。
ウインドウ1
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_cpp talker
ウインドウ2
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener
下記のような形でpublishする側とlistenする側でHello Worldが表示されていればOKです。
便利ツールの導入
ROSはたくさんのコマンドウインドウを開くので「terminator」など導入しておくと便利です。
また、現時点でUbuntuとしての設定などはあまりしていない状態ですので、別途必要なツールやパッケージなどは必要に応じてインストールしてください。
sudo apt install terminator
アプリから「terminator」と検索して出てくればOKです。
←←VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(準備編)
→→VMware上のUbuntu 22.04にROS2を入れてOpen-RMFデモを動かしてみた(Open-RMF導入編)