はじめに
この夏で興味のあることはぜんぶやろうときめたのでその3つめ(経路計画)(1つ目は強化学習, 2つ目はRNN(LSTM))
- RRT
- DWA
- A*
などを実装していく予定です
github:https://github.com/Shunichi09
今回のは
https://github.com/Shunichi09/Qiita/tree/master/Path_planning
参考
経路復元のところで少し苦戦したので,ロボット界で有名なエニグマさん
https://myenigma.hatenablog.com/entry/2016/03/23/092002
を参考にしました
環境
- python3.6.6
- Windows 10
- anaconda
- matplotlib 2.2.2
- numpy 1.14.3
ゴールした!そのあとは?
さて,前回,障害物を回避してゴールをしたわけですが,
そのあとどうするのというわけです.
ただたんにゴールにつけるかどうかを確認したいならそれでいいですが,これだけだとどのパスがゴールにたどりついたのかがわかりません.
なので,どのパスがゴールについたかを把握するために探索するというわけです.
昔アルゴリズムの勉強をちらっとした際に経路探索のアルゴリズムは習得しました
幅優先探索と,深さ優先対策です
この場合は幅優先探索の方がよい気がするのですが,
どう使えばいいのかわからない
今もっているのは
各ノードの位置と,それらをつなぐPath(位置から位置)のみです
考えてみましょう
ゴールは分かっているので,ゴールからさかのぼっていくのが妥当です.
よって,
- 今もっているPathと位置から,いけるところの位置を算出
- さらに,その行ける位置から...
と繰り返していって,スタートだったら,そのPathを決定!ってすればよいですね!!
と考えていたところで
ふと気づいた
これさかのぼったら一瞬でした.
なぜかというと
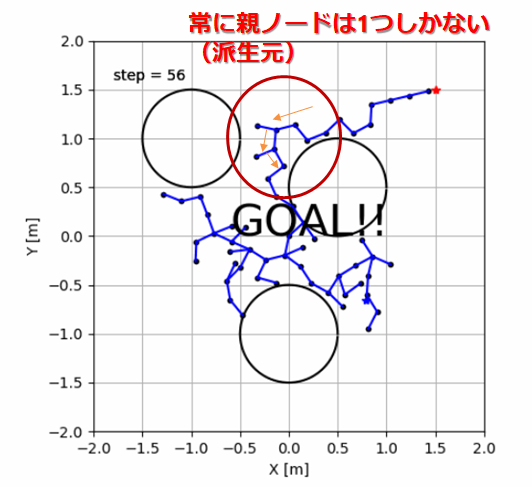
さっきの図でさかのぼってみると,これ親ノードというか,派生元は1つしかないんですね
なので,今の自分の位置から戻れるPathを選び続ければ終了します
今回の僕のプログラムだと,いちいち全探索をしないといけないので
各ノードをクラスで管理して,親ノードを作るようにします
結果はこんな感じ
プログラム
親ノードをさかのぼるときは,自分のノードの親をよんできて
そのままノードリストの中と照合して,インデックスをだせば,次のノードにうつれますのでそれでやります
# Link : https://qiita.com/MENDY/items/23950fb3f32dbb5e4886
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as ani
import math
import copy
class Node():
def __init__(self, x, y, parent, way_flag=True):
self.x = x
self.y = y
self.xy = np.array([x, y])
self.parent = parent # 親ノードを管理
self.way_flag = way_flag
class RRT():
def __init__(self, init, goal, obstacles):
# 初期設定
self.init_x = init[0]
self.init_y = init[1]
self.goal_x = goal[0]
self.goal_y = goal[1]
self.goal = goal
self.obstacles = obstacles
# パラメータ群
# 伸ばし幅
self.d = 0.2
# 何回かに一回はゴールを選ぶ
self.g_rate = 0.1
# どこまでゴールに近づければいいか
self.g_range = 0.1
# 探索範囲
self.MAX_x = 3
self.MAX_y = 3
self.min_x = -3
self.min_y = -3
# ノードを作成する
# これはただのノード
self.Nodes_list = [Node(self.init_x, self.init_y, None, way_flag=False)]
self.Nodes_posi = np.array([[self.init_x, self.init_y]])
# これはpath
self.path_x = np.empty((0,2), float)
self.path_y = np.empty((0,2), float)
# samples
self.samples = np.empty((0,2), float)
self.nearest_node =None
self.new_node =None
def search(self):
# 行動決定(何回かに一回はGoalを選ぶ)
temp = np.random.randint(0, 10)
if temp > 0:
# random点を打つ(-1.5, 1.5の範囲で選ぶ)
s_x = (np.random.rand() * self.MAX_x) - self.MAX_x/2
s_y = (np.random.rand() * self.MAX_y) - self.MAX_y/2
self.sample = np.array([s_x, s_y])
else:
# goalを選ぶ
s_x = self.goal_x
s_y = self.goal_y
self.sample = np.array([s_x, s_y])
# ノード探索
distance = float('inf')
self.nearest_node = None
for i in range(len(self.Nodes_list)):
node = self.Nodes_list[i]
part_MSE = (self.sample - node.xy) * (self.sample - node.xy)
RMSE = math.sqrt(sum(part_MSE))
# 距離が小さかったら追加
if RMSE < distance:
distance = RMSE
self.nearest_node = node # node type
# 新ノードを作成
pull = self.sample - self.nearest_node.xy
grad = math.atan2(pull[1], pull[0])
d_x = math.cos(grad) * self.d
d_y = math.sin(grad) * self.d
new_node_xy = self.nearest_node.xy + np.array([d_x, d_y])
self.new_node = Node(new_node_xy[0], new_node_xy[1], self.nearest_node)
return self.nearest_node, self.new_node
def check_obstacles(self):
obstacle_flag = False
for i in range(self.obstacles.shape[0]):
obs_dis = np.sqrt(sum((self.new_node.xy - self.obstacles[i, :2]) * (self.new_node.xy - self.obstacles[i, :2])))
if obs_dis < self.obstacles[i, 2]:
print('Collision!!')
obstacle_flag = True
return obstacle_flag
def check_goal(self):
dis = np.sqrt(sum((self.new_node.xy - self.goal) * (self.new_node.xy - self.goal)))
goal_flag = False
print('dis = {0}'.format(dis))
if dis < self.g_range:
print('GOAL!!')
goal_flag = True
return goal_flag
def make_all_path(self):# 追加処理
# 新ノードを追加
self.Nodes_list.append(self.new_node)
self.Nodes_posi = np.vstack((self.Nodes_posi, self.new_node.xy))
self.path_x = np.append(self.path_x, np.array([[self.nearest_node.x, self.new_node.x]]), axis=0)
self.path_y = np.append(self.path_y, np.array([[self.nearest_node.y, self.new_node.y]]), axis=0)
self.samples = np.append(self.samples, [[self.sample[0], self.sample[1]]], axis=0)
return self.Nodes_posi, self.path_x, self.path_y, self.samples
def make_final_path(self):
final_path = [[self.Nodes_list[-1].x, self.Nodes_list[-1].y]]
lastindex = len(self.Nodes_list) - 1
while self.Nodes_list[lastindex].way_flag:
node = self.Nodes_list[lastindex]
final_path = np.vstack((final_path, [[node.x, node.y]]))
lastindex = self.Nodes_list.index(node.parent)
print('last= {0}'.format(lastindex))
final_path = np.vstack((final_path, [[self.init_x, self.init_y]]))
print(final_path)
return final_path
class Figures():
def __init__(self):
self.fig = plt.figure()
self.axis = self.fig.add_subplot(111)
def fig_set(self):
# 初期設定
MAX_x = 2
min_x = -2
MAX_y = 2
min_y = -2
self.axis.set_xlim(min_x, MAX_x)
self.axis.set_ylim(min_y, MAX_y)
# 軸
self.axis.grid(True)
# 縦横比
self.axis.set_aspect('equal')
# label
self.axis.set_xlabel('X [m]')
self.axis.set_ylabel('Y [m]')
def plot(self, path_x, path_y, Nodes):
self.axis.plot(path_x, path_y)
self.axis.plot(Nodes[:, 0], Nodes[:, 1], '.', color='k')
plt.show()
def anim_plot(self, path_x, path_y, Nodes_posi, samples, goal, obstacles, final_path):
imgs = []
finish_buffa = 20# 終了後もそのまま数秒表示したいので
for i in range(path_x.shape[1] + finish_buffa):
img = []
if i >= path_x.shape[1]:
i = path_x.shape[1] - 1
img_text = self.axis.text(0.05, 0.9, 'step = {0}'.format(i), transform=self.axis.transAxes)
img.append(img_text)
img_goal_text = self.axis.text(0.35, 0.5, 'GOAL!!', transform=self.axis.transAxes, fontsize=30)
img.append(img_goal_text)
img_final_path = self.axis.plot(final_path[:, 0], final_path[:, 1], color='r', linewidth=5)
img.extend(img_final_path)
# step数を追加
img_text = self.axis.text(0.05, 0.9, 'step = {0}'.format(i), transform=self.axis.transAxes)
img.append(img_text)
# goalを追加
img_goal = self.axis.plot(goal[0], goal[1], '*', color='r')
img.extend(img_goal)
# obstaclesを追加
for k in range(obstacles.shape[0]):
circle_x, circle_y = self.circle_make(obstacles[k, 0], obstacles[k, 1], obstacles[k ,2])
img_obstacle = self.axis.plot(circle_x, circle_y, color='k')
img.extend(img_obstacle)
# sampleを追加
img_sample = self.axis.plot(samples[i, 0], samples[i, 1], '*', color='b')
img.extend(img_sample)
# nodeを追加
img_nodes = self.axis.plot(Nodes_posi[:i+2, 0], Nodes_posi[:i+2, 1], '.', color='k')
img.extend(img_nodes)
# pathを追加
for k in range(i+1):
img_path = self.axis.plot(path_x[:, k], path_y[:, k], color='b')
img.extend(img_path)
print('i = {0}'.format(i))
imgs.append(img)
animation = ani.ArtistAnimation(self.fig, imgs)
print('save_animation?')
shuold_save_animation = int(input())
if shuold_save_animation:
animation.save('basic_animation.gif', writer='imagemagick')
plt.show()
def circle_make(self, x, y, size):# 円作るよう
# 初期化
circle_x = [] #位置を表す円のx
circle_y = [] #位置を表す円のy
steps = 100 #円を書く分解能はこの程度で大丈夫
for i in range(steps):
circle_x.append(x + size*math.cos(i*2*math.pi/steps))
circle_y.append(y + size*math.sin(i*2*math.pi/steps))
return circle_x, circle_y
def main():
# figures
figure = Figures()
figure.fig_set()
# pathmake
goal = [1.5, 1.5]
init = [0.0, 0.0]
obstacles = np.array([[-1, 1, 0.5], [0, -1, 0.5], [0.5, 0.5, 0.5]])
path_planner = RRT(init, goal, obstacles)
# iterations = 100
while True:
path_planner.search()
obstacle_flag = path_planner.check_obstacles()
if obstacle_flag: # 障害物あり
continue
goal_flag = path_planner.check_goal()
Nodes, path_x, path_y, samples = path_planner.make_all_path()
if goal_flag :
final_path = path_planner.make_final_path()
break
# img用に処理
path_x = path_x.transpose()
path_y = path_y.transpose()
figure.anim_plot(path_x, path_y, Nodes, samples, goal, obstacles, final_path)
if __name__ == '__main__':
main()
障害物の位置を変えてもうまくいきます
すごいですねこのアルゴリズム
最適性を保証したやつとかもあるみたいなので他の項目が終わり次第やりたいと思います
こうすれば,あとは通る点が分かっているので,それを通るように制御していけば,そっちにいけることになります