はじめに
これまでに扱った要素は大きく2つあります。
1つは、複数地点を効率よく回る 巡回経路探索(Traveling Salesman Problem, TSP) を Python で実装し、ユークリッド距離(直線距離)を使ってルート最適化を行ったこと。
もう1つは、OSRM(Open Source Routing Machine) を Docker で構築し、実際の道路に基づいた移動距離・所要時間を取得できるようにしたことです。
今回はこれらを組み合わせ、
TSPの距離計算を「直線距離」から「OSRMが返す道路距離」に置き換えることで、
より現実的な巡回ルート探索や片道ルート探索を実装していきます。
準備
本記事では、あらかじめ OSRM サーバがローカルで稼働 していることを前提とします。
(Docker でのセットアップ手順は割愛。http://localhost:5000 にアクセスできる状態にしておいてください)
前提の確認
-
OSRM サーバ稼働確認
ブラウザで次の形式の URL にアクセスし、JSON が返ることを確認します。
http://localhost:5000/route/v1/driving/{lon1},{lat1};{lon2},{lat2}?overview=false -
Python 実行環境
Windows 11 + Python 3.x(VS Code + Git Bash 想定) -
必要ライブラリ
- HTTP クライアント(例:
requestsを想定)
- HTTP クライアント(例:
本章のゴール
- Python から OSRM API を呼び、2 点間の道路距離(m)と所要時間(秒) を取得できること。
- 本記事以降で使う 距離行列 作成の前段として、「2 点間距離の取得関数」 を用意すること。
関数の役割
- 引数:
(lon, lat)形式の座標を 2 点渡す - 戻り値:
(distance_meters, duration_seconds)を返す - 内部処理: OSRM API にアクセスし、結果の JSON から必要な値を取り出す
import requests
def get_osrm_distance(from_coord, to_coord):
"""
from_coord, to_coord: (lon, lat) のタプル
戻り値: (距離[m], 所要時間[秒])
"""
url = f"http://localhost:5000/route/v1/driving/{from_coord[0]},{from_coord[1]};{to_coord[0]},{to_coord[1]}"
res = requests.get(url, params={"overview": "false"})
data = res.json()
return data["routes"][0]["distance"], data["routes"][0]["duration"]
# 動作確認例
if __name__ == "__main__":
tokyo = (139.7671, 35.6812) # 東京駅
shibuya = (139.7013, 35.6580) # 渋谷駅
dist, dur = get_osrm_distance(tokyo, shibuya)
print(f"距離: {dist/1000:.2f} km, 所要時間: {dur/60:.1f} 分")
距離行列の作成
TSP(巡回経路探索、あるいは片道ルート探索)を解くためには、
「各地点間の距離」を一覧化した 距離行列(distance matrix) が必要です。
ここでは、前章で用意した get_osrm_distance(from_coord, to_coord) を利用して、
地点リストから距離行列を作成する関数を用意します。
関数の役割
- 引数:複数の座標リスト(
[(lon, lat), (lon, lat), ...]) - 戻り値:2次元リスト(
dist_matrix[i][j]が i→j の距離[m]) - 内部処理:各地点の組み合わせについて OSRM API を呼び出し、距離を埋める
import itertools
def build_distance_matrix(coords):
"""
OSRM を用いて距離行列を作成する
coords: [(lon, lat), (lon, lat), ...]
戻り値: dist_matrix[i][j] が i→j の距離[m]
"""
n = len(coords)
dist_matrix = [[0.0] * n for _ in range(n)]
for i, j in itertools.permutations(range(n), 2):
dist, _ = get_osrm_distance(from_coord=coords[i], to_coord=coords[j])
dist_matrix[i][j] = dist
return dist_matrix
- OSRM API を地点の組み合わせごとに呼び出すため、地点数が多いと処理時間が長くなります
- 5〜10地点程度であれば問題ありませんが、大規模データではバルクAPI(
/tableエンドポイント)利用を検討すると効率的です
TSPアルゴリズムの適用
距離行列が準備できたので、これを使って 巡回経路探索(TSP) を解きます。
ここでは、過去記事で扱ったシンプルな手法を再利用します。
使用するアルゴリズム
-
最近近傍法(Nearest Neighbor, NN)
ある地点から最も近い未訪問地点を順に選ぶ簡易手法。計算が速い。 -
2-opt 改善法
初期ルートに対し、辺の入れ替えで距離が短くなる場合に更新していく改良手法。
関数の役割
- 入力:距離行列(
dist_matrix[i][j]が i→j の距離[m]) - 出力:訪問順序(地点インデックスのリスト)と総距離
- 流れ:
- 最近近傍法で初期ルートを生成
- 2-opt 改善法でルートを最適化
def total_distance(route, dist_matrix):
"""
巡回ルート(route)の総距離を計算(最後は出発点に戻る)
route: [0, 2, 1, ...] のような訪問順(出発点=先頭要素)
"""
n = len(route)
d = 0.0
for i in range(n):
a = route[i]
b = route[(i + 1) % n] # 最後は出発点に戻る
d += dist_matrix[a][b]
return d
def nearest_neighbor(dist_matrix, start=0):
"""
最近近傍法で初期ルートを作成(巡回ルート)
戻り値: (route, total_dist)
"""
n = len(dist_matrix)
unvisited = set(range(n))
route = [start]
unvisited.remove(start)
current = start
while unvisited:
nxt = min(unvisited, key=lambda j: dist_matrix[current][j])
route.append(nxt)
unvisited.remove(nxt)
current = nxt
return route, total_distance(route, dist_matrix)
def two_opt(route, dist_matrix, max_iterations=1000):
"""
2-opt 改善法でルートを改良(巡回ルート前提)
戻り値: (best_route, best_distance)
"""
best = route[:]
best_dist = total_distance(best, dist_matrix)
n = len(best)
improved = True
it = 0
while improved and it < max_iterations:
improved = False
it += 1
for i in range(1, n - 1):
for k in range(i + 1, n):
a, b = best[i - 1], best[i]
c, d = best[k % n], best[(k + 1) % n]
delta = (dist_matrix[a][c] + dist_matrix[b][d]) - (dist_matrix[a][b] + dist_matrix[c][d])
if delta < -1e-9:
best[i:k + 1] = reversed(best[i:k + 1])
best_dist += delta
improved = True
return best, best_dist
前回の記事では、巡回ルートだけでなく 片道ルート(始点と終点が異なる場合) にも対応できるように拡張しました。
本記事のアルゴリズム部分はそのまま利用でき、「距離の計算をユークリッド距離から OSRM に置き換える」 だけで巡回ルート・片道ルートのどちらにも適用可能です。
実行例
最後に、実際の地点を入力して TSP を解いてみます。
ここでは例として、次の 8 地点を使用します。
- 東京駅
- 押上(スカイツリー)
- 浅草(雷門)
- お台場(ダイバーシティ)
- 羽田空港 第3ターミナル
- 六本木ヒルズ
- 吉祥寺駅
- 品川駅
実行の流れ
- 各地点の座標を
(lon, lat)で定義 -
build_distance_matrixで距離行列を作成(OSRMを利用) -
nearest_neighborで初期ルートを作成 -
two_optでルートを改善 - 結果(訪問順序と総距離)を表示
# 実行例: 8 地点で TSP を実行(OSRM 距離ベース)
# 前提: get_osrm_distance, build_distance_matrix, nearest_neighbor, two_opt が定義済み
# 1) 地点の定義((lon, lat))
names = [
"東京駅",
"押上(スカイツリー)",
"浅草(雷門)",
"お台場(ダイバーシティ)",
"羽田空港 第3ターミナル",
"六本木ヒルズ",
"吉祥寺駅",
"品川駅",
]
coords = [
(139.7671, 35.6812), # 東京駅
(139.8107, 35.7101), # 押上(スカイツリー)
(139.7967, 35.7110), # 浅草(雷門)
(139.7750, 35.6250), # お台場(ダイバーシティ)付近
(139.7840, 35.5494), # 羽田空港 第3T 付近
(139.7304, 35.6605), # 六本木ヒルズ
(139.5826, 35.7033), # 吉祥寺駅
(139.7386, 35.6285), # 品川駅
]
# 2) 距離行列の作成(OSRM)
dist_matrix = build_distance_matrix(coords)
# 3) 最近近傍法で初期ルート(東京駅を始点にする場合は start=0)
init_route, init_len = nearest_neighbor(dist_matrix, start=0)
# 4) 2-opt で改善
best_route, best_len = two_opt(init_route, dist_matrix)
# 5) 結果表示
def route_to_names(route, cycle=True):
s = " → ".join(names[i] for i in route)
return s + (f" → {names[route[0]]}" if cycle else "")
print("NN 初期ルート:", init_route, f"距離: {init_len/1000:.2f} km")
print(" 表示 :", route_to_names(init_route))
print("2-opt 改善後 :", best_route, f"距離: {best_len/1000:.2f} km")
print(" 表示 :", route_to_names(best_route))
# ------------------------------
# NN 初期ルート: [0, 2, 1, 5, 7, 3, 4, 6] 距離: 95.32 km
# 表示 : 東京駅 → 浅草(雷門) → 押上(スカイツリー) → 六本木ヒルズ → 品川駅 → お台場(ダイバーシティ) → 羽田空港 第3ターミナル → 吉祥寺駅 → 東京駅
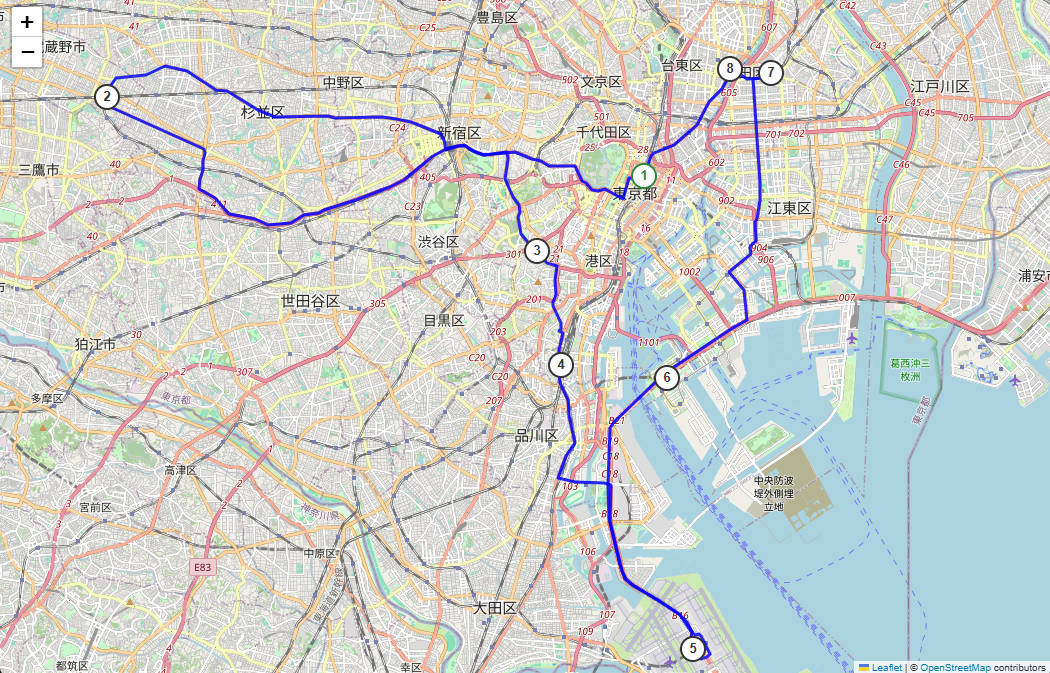
# 2-opt 改善後 : [0, 6, 5, 7, 4, 3, 1, 2] 距離: 86.42 km
# 表示 : 東京駅 → 吉祥寺駅 → 六本木ヒルズ → 品川駅 → 羽田空港 第3ターミナル → お台場(ダイバーシティ) → 押上(スカイツリー) → 浅草(雷門) → 東京駅
# ------------------------------
2-opt の結果
まとめ
本記事では、これまでユークリッド距離(直線距離)で実装していた巡回経路探索(TSP)を、
OSRM が返す道路距離に置き換えることで、より現実的なルート探索を実現しました。
ポイント整理
- OSRM サーバをローカルで稼働させ、Python から距離・所要時間を取得
- 得られた値を用いて 距離行列 を構築
- 既存の TSP アルゴリズム(最近近傍法+2-opt 改善法)に組み込み
- 直線距離と比較して、実際の道路に基づく現実的なルートが得られることを確認
- 片道ルート拡張にもそのまま適用可能
今後の展望
- OSRM
/tableエンドポイントを使った効率的な距離行列の作成 - VRP(Vehicle Routing Problem、複数車両の配車計画)への拡張
- 時間帯や交通規制を考慮したルート探索
これにより、「TSPを道路距離で解く」ための基本的な仕組みが整いました。
次のステップとしては、地点数を増やして処理性能を検証したり、
より高度なアルゴリズム(遺伝的アルゴリズムや局所探索法)との組み合わせも検討できます。