1. はじめに
前回の記事では、複数地点を効率よく回る経路を求める 巡回経路探索(TSP) を取り上げ、
基本的な手法として「最近近傍法(Nearest Neighbor, NN)」と「2-opt 改善法」を実装しました。
今回はその続編として、始点と終点を任意に設定できるようにし、
「巡回ルート(出発点に戻る)」だけでなく「片道ルート(出発点と到着点が異なる)」にも対応できるように拡張していきます。
2. 巡回ルートと片道ルート
巡回ルート
出発点と到着点が同じになるルートです。
例えば、観光で
「A駅から出発して複数の観光スポットを回り、再びA駅に戻る日帰りコース」のようなイメージです。
片道ルート
出発点と到着点が異なるルートです。
例えば、
「A駅から出発して観光スポットを巡り、最後はB駅で終了する観光コース」のようなイメージです。
巡回と片道はどちらが優れているというものではなく、
利用シーンに応じてどちらを採用するかが決まるのが特徴です。
3. 実装拡張のポイント
前回の実装では「出発点に戻る巡回ルート」を前提にしていました。
今回はこれを拡張して、以下のような設定に対応できるようにします。
- 始点を任意に指定できる
- 終点を任意に指定できる
- 巡回ルート / 片道ルート を切り替え可能にする
4. 最近近傍法(NN)の拡張
前回の実装では「始点=終点」で固定した巡回ルートしか扱えませんでした。
ここでは、始点と終点を任意に指定できるように拡張します。
実装の考え方
- 引数で
startとendを受け取る -
endが指定されていない場合は巡回ルート(=出発点に戻る)とみなす -
endが指定されている場合は片道ルート(=出発点と異なる場所で終了)とする
実装例
def nearest_neighbor_extended(D, start=0, end=None):
n = len(D)
assert 0 <= start < n, "start が範囲外です"
if end is not None:
assert 0 <= end < n, "end が範囲外です"
unvisited = set(range(n))
unvisited.discard(start)
if end is not None:
unvisited.discard(end)
route = [start]
current = start
while unvisited:
next_city = min(unvisited, key=lambda j: D[current][j])
unvisited.remove(next_city)
route.append(next_city)
current = next_city
# 巡回ルートなら出発点に戻る
if end is None:
route.append(start)
else:
route.append(end)
return route
5. 2-opt 改善法 の拡張
巡回ルートの場合
従来どおり、ルート全体を対象にして2本の辺を入れ替え、
より短い経路が得られれば改善を繰り返します。
片道ルートの場合
始点と終点は固定されるため、
両端を固定したまま中間部分だけを2-optの対象とします。
実装例
def two_opt_extended(route, D, is_cycle=True):
best = route[:]
n = len(best)
if n < 4:
return best
improved = True
while improved:
improved = False
# 巡回の場合は全体を対象、片道の場合は両端を除外
start_idx = 1
end_idx = n - 2 if not is_cycle else n - 1
for i in range(start_idx, end_idx - 1):
for j in range(i + 1, end_idx):
if j - i == 1: # 隣接区間はスキップ
continue
new_route = best[:i] + best[i:j][::-1] + best[j:]
if total_distance(D, new_route) < total_distance(D, best):
best = new_route
improved = True
return best
6. 実行例と結果比較
ここでは、前回と同じ東京都内のスポットを対象に、
巡回ルートと片道ルートの両方を計算して比較してみます。
スクリプト全体
import math
# -----------------------------
# サンプルデータ(東京都内のスポット)
# -----------------------------
places = [
("東京駅", 35.681236, 139.767125),
("浅草寺", 35.714765, 139.796655),
("東京スカイツリー", 35.710063, 139.810700),
("上野公園", 35.714167, 139.774444),
("渋谷駅", 35.658034, 139.701636),
]
# -----------------------------
# 距離計算(ハーサイン:km)
# -----------------------------
def haversine(lat1, lon1, lat2, lon2) -> float:
"""2地点間の大円距離を km 単位で返す。"""
R = 6371.0
phi1, phi2 = math.radians(lat1), math.radians(lat2)
dphi = math.radians(lat2 - lat1)
dlmb = math.radians(lon2 - lon1)
a = math.sin(dphi / 2) ** 2 + math.cos(phi1) * math.cos(phi2) * math.sin(dlmb / 2) ** 2
return 2 * R * math.asin(math.sqrt(a))
def build_distance_matrix(places):
"""対称行列の性質を使って計算を半分に。単位は km。"""
n = len(places)
D = [[0.0]*n for _ in range(n)]
for i in range(n):
for j in range(i+1, n):
d = haversine(places[i][1], places[i][2], places[j][1], places[j][2])
D[i][j] = D[j][i] = d
return D
def total_distance(D, route) -> float:
"""route は都市インデックスの並び。最後の要素は到着点(巡回なら開始点と同じ)。"""
return sum(D[route[i]][route[i+1]] for i in range(len(route)-1))
# -----------------------------
# 拡張版 最近近傍法(巡回/片道対応)
# -----------------------------
def nearest_neighbor_extended(D, start=0, end=None):
"""
- 巡回: end=None のとき、最後に start に戻る
- 片道: end が指定されているとき、最後は end で終了(end は訪問対象から事前に除外)
"""
n = len(D)
assert 0 <= start < n, "start が範囲外です"
if end is not None:
assert 0 <= end < n, "end が範囲外です"
unvisited = set(range(n))
unvisited.discard(start)
if end is not None:
unvisited.discard(end)
route = [start]
current = start
while unvisited:
nxt = min(unvisited, key=lambda j: D[current][j])
unvisited.remove(nxt)
route.append(nxt)
current = nxt
# 巡回/片道の終点処理
if end is None:
route.append(start)
else:
route.append(end)
return route
# -----------------------------
# 拡張版 2-opt(巡回/片道対応)
# -----------------------------
def two_opt_extended(route, D, is_cycle=True):
"""
- 巡回: ルート全体を対象に 2-opt 改善(閉路想定、最後は開始点)
- 片道: 始点・終点は固定し、間の区間のみ対象に 2-opt 改善
"""
best = route[:] # 参照共有を避ける
n = len(best)
if n < 4:
return best
improved = True
while improved:
improved = False
if is_cycle:
# 例: [s, ..., s] の閉路(末尾は開始点と同じ index)
# 端点(0/-1)は固定扱いとし、中間だけ反転候補にする
i_start, i_end_excl = 1, n-1 # i in [1, n-2]
j_end_excl = n-1 # j in (i+1, n-2]
else:
# 片道: 両端(0, n-1)固定で中間のみ
i_start, i_end_excl = 1, n-2 # i in [1, n-3]
j_end_excl = n-1 # j in (i+1, n-2]
for i in range(i_start, i_end_excl):
for j in range(i+1, j_end_excl):
if j - i == 1: # 隣接区間の反転は効果薄なのでスキップ
continue
new_route = best[:i] + best[i:j][::-1] + best[j:]
if total_distance(D, new_route) < total_distance(D, best):
best = new_route
improved = True
return best
# -----------------------------
# ユーティリティ
# -----------------------------
def route_names(route, places):
return [places[i][0] for i in route]
# -----------------------------
# デモ実行
# -----------------------------
if __name__ == "__main__":
D = build_distance_matrix(places)
# 巡回ルート(東京駅→東京駅)
route_cycle_nn = nearest_neighbor_extended(D, start=0, end=None)
route_cycle_opt = two_opt_extended(route_cycle_nn, D, is_cycle=True)
dist_cycle_nn = total_distance(D, route_cycle_nn)
dist_cycle_opt = total_distance(D, route_cycle_opt)
print("【巡回】NN(インデックス) :", route_cycle_nn)
print("【巡回】NN(名称) :", " -> ".join(route_names(route_cycle_nn, places)))
print(f"【巡回】総距離 NN : {dist_cycle_nn:.2f} km")
print("【巡回】2-opt(インデックス):", route_cycle_opt)
print("【巡回】2-opt(名称) :", " -> ".join(route_names(route_cycle_opt, places)))
print(f"【巡回】総距離 2-opt : {dist_cycle_opt:.2f} km")
print("-"*60)
# 片道ルート(東京駅→渋谷駅)
route_one_nn = nearest_neighbor_extended(D, start=0, end=4)
route_one_opt = two_opt_extended(route_one_nn, D, is_cycle=False)
dist_one_nn = total_distance(D, route_one_nn)
dist_one_opt = total_distance(D, route_one_opt)
print("【片道】NN(インデックス) :", route_one_nn)
print("【片道】NN(名称) :", " -> ".join(route_names(route_one_nn, places)))
print(f"【片道】総距離 NN : {dist_one_nn:.2f} km")
print("【片道】2-opt(インデックス):", route_one_opt)
print("【片道】2-opt(名称) :", " -> ".join(route_names(route_one_opt, places)))
print(f"【片道】総距離 2-opt : {dist_one_opt:.2f} km")
# -----------------------------------------------------------------------------
# 【巡回】NN(インデックス) : [0, 3, 1, 2, 4, 0]
# 【巡回】NN(名称) : 東京駅 -> 上野公園 -> 浅草寺 -> 東京スカイツリー -> 渋谷駅 -> 東京駅
# 【巡回】総距離 NN : 24.98 km
# 【巡回】2-opt(インデックス): [0, 2, 1, 3, 4, 0]
# 【巡回】2-opt(名称) : 東京駅 -> 東京スカイツリー -> 浅草寺 -> 上野公園 -> 渋谷駅 -> 東京駅
# 【巡回】総距離 2-opt : 23.97 km
# ------------------------------------------------------------
# 【片道】NN(インデックス) : [0, 3, 1, 2, 4]
# 【片道】NN(名称) : 東京駅 -> 上野公園 -> 浅草寺 -> 東京スカイツリー -> 渋谷駅
# 【片道】総距離 NN : 18.52 km
# 【片道】2-opt(インデックス): [0, 3, 1, 2, 4]
# 【片道】2-opt(名称) : 東京駅 -> 上野公園 -> 浅草寺 -> 東京スカイツリー -> 渋谷駅
# 【片道】総距離 2-opt : 18.52 km
# -----------------------------------------------------------------------------
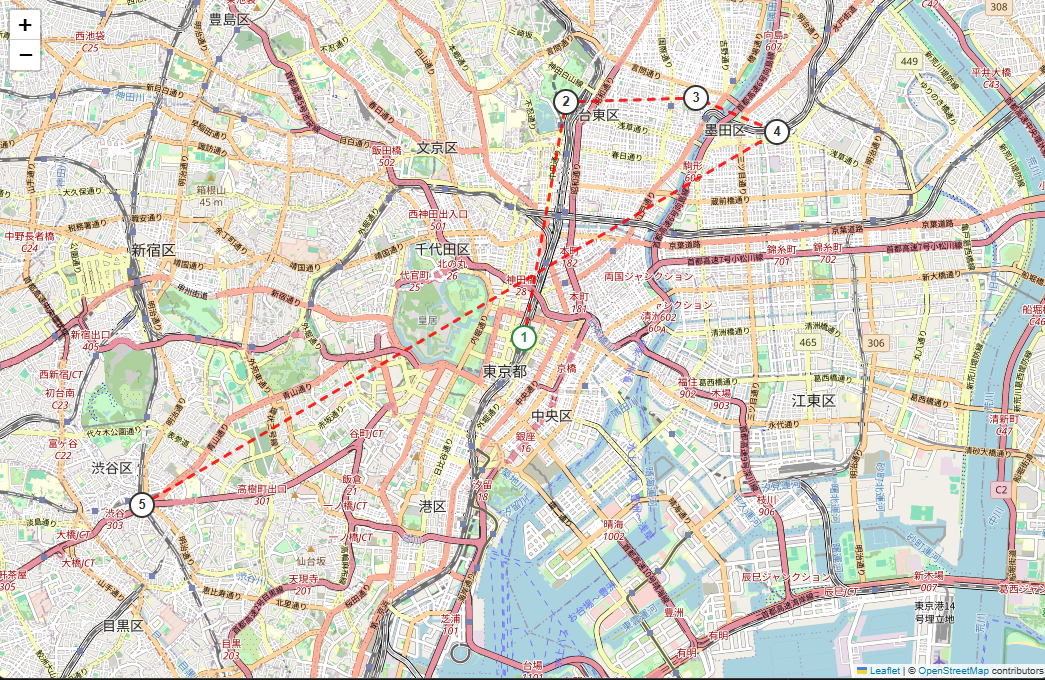
folium で可視化
import folium
def plot_route_numbered(places, route, filename="route.html", color="blue", is_cycle=True):
"""
1本のルートを番号付きで可視化してHTML保存する。
- is_cycle=True なら閉路(最後に開始点へ戻る線を描く)
- is_cycle=False なら片道(線は閉じない、点線で描く)
"""
start_idx = route[0]
center = [places[start_idx][1], places[start_idx][2]]
m = folium.Map(location=center, zoom_start=13)
def to_latlons(r):
return [(places[i][1], places[i][2]) for i in r]
latlons = to_latlons(route)
# 巡回のみ線を閉じる
if is_cycle:
if route[-1] != route[0]:
latlons.append((places[start_idx][1], places[start_idx][2]))
poly_kwargs = dict(weight=3, opacity=0.85, color=color)
else:
# 片道は閉じない&点線で視覚差
poly_kwargs = dict(weight=3, opacity=0.85, color=color, dash_array="6,8")
folium.PolyLine(latlons, **poly_kwargs).add_to(m)
# 訪問順ラベル(巡回は最後の重複を除く)
seq = route[:-1] if (is_cycle and route[-1] == route[0]) else route[:]
for order, idx in enumerate(seq, start=1):
name, lat, lon = places[idx]
badge = f"""
<div style="
background:white; border: 2px solid {'#2b8a3e' if order==1 else '#333'};
color: {'#2b8a3e' if order==1 else '#333'};
width: 26px; height: 26px; line-height: 22px;
text-align: center; font-weight: 700;
border-radius: 50%; font-size: 13px;">
{order}
</div>"""
icon = folium.DivIcon(html=badge, icon_size=(26,26), icon_anchor=(13,13))
popup_html = f'<div style="white-space:nowrap;word-break:keep-all;font-size:14px;">{order}: {name}</div>'
folium.Marker(
location=[lat, lon],
icon=icon,
popup=folium.Popup(popup_html, max_width=400),
tooltip=folium.Tooltip(f"{order}: {name}", sticky=True)
).add_to(m)
# 始点/終点の強調
start_lat, start_lon = places[start_idx][1], places[start_idx][2]
folium.CircleMarker([start_lat, start_lon], radius=8, fill=True, fill_opacity=0.7,
color="#2b8a3e", fill_color="#2b8a3e", popup="START").add_to(m)
end_idx = seq[-1]
end_lat, end_lon = places[end_idx][1], places[end_idx][2]
folium.CircleMarker([end_lat, end_lon], radius=7, fill=True, fill_opacity=0.7,
color="#c92a2a", fill_color="#c92a2a",
popup="END" if end_idx != start_idx else "END (=START)").add_to(m)
m.save(filename)
return filename
始点:東京駅/終点:渋谷駅
7. まとめ
本記事では、複数地点を効率よく回る経路を求める 巡回経路探索(TSP) を Python で実装し、次のポイントを確認しました。
- 始点・終点を任意に指定できるよう拡張
- 巡回ルート(出発点に戻る)と 片道ルート(別の地点で終了)の両方に対応
今回の実装は基本的なものでしたが、さらに応用が可能です。
例えば、より多くの地点を対象にした場合の計算効率化や、道路に沿った距離・所要時間を用いた現実的なルート探索などが考えられます。